涉水救援機器人設計
摘 ?要
隨著城市化進度的加快,各種水上游樂設備的增多,水上災害和溺水事件頻繁發生,水上救援任務困難重重,特別是在一些水流湍急的環境下進行救援。傳統的水上救援工作比較緩慢,大多數是通過投射救生圈或者等待專業的救援人員到來才能展開救援,積大的降低了救援的效率,嚴重危害著溺水者的生命。在這樣的研究背景下,本文提出了一種新型的涉水救援機器人裝逼,通過遠程遙控和自動巡檢兩種工作方式對落水人員進行營救,不僅減少了救援難度,同時也提高了溺水者獲救的概率。
本文在研究調查了現有水上救援機器人設備的前提下,設計了一種新型的救援設備,涉水救援機器人,其主要是由機械結構和控制系統兩部分組成。本文主要完成了救援機器人的機械結構的設計,主要包括行走機構、救援機構和船體的設計,對機器人噴水推進器的基本結構和原理特點進行了詳細的論述,完成了水面機器人的阻力分析。同時也完成了救援機器人控制系統的初步設計,使用三維的CAD軟件完成來了涉水救援機器人的三維模型的繪制,采用ansys對救援機器人的主要零部件進行有限元分析,確保設計的救援機器人可以在水中穩定的前進,完成救援任務。
目 ?錄
1 ?緒論?? ?1
1.1 選題的背景及意義?? ?1
1. 2 ?研究的現狀?? ?1
1.2.1 ?國內的研究現狀?? ?2
1.2.2 ?國外的研究現狀?? ?3
1.3 ?本次設計主要研究內容?? ?4
2 ?涉水救援機器人的總體設計方案?? ?6
2.1 ?設計要求?? ?6
2.2 ?總體的設計方案?? ?6
2.3 ?本章小結?? ?7
3 ?涉水救援機器人的機械結構設計?? ?8
3.1 ?設計方法和設計原則?? ?8
3.2 ?機體結構的設計?? ?8
3.2.1 ?船體結構設計?? ?8
3.2.2 ?船體的排水量和吃水深度?? ?9
3.3 ?行走裝置的設計?? ?9
3.3.1 ?機器人受到的阻力?? ?10
3.3.2 ?推進器的選型?? ?11
3.3.3 ?噴水推進器的工作原理?? ?12
3.3.4 ?噴水推進器的優點?? ?12
3.3.5 ?噴水推進器推力的影響因素?? ?13
3.3.6 ?噴水電機的選型?? ?14
3.3.7 ?電池的選型?? ?15
3.4 ?救援裝置的設計?? ?15
3.4.1 ?救援網救援裝置的設計?? ?15
3.4.2 ?救生圈救援裝置的設計?? ?21
3.5 ?本章小結?? ?22
4 ?涉水救援機器人的控制系統的設計?? ?23
4.1 ?硬件電路的設計?? ?23
4.1.1 ?晶振電路模塊?? ?23
4.1.2 ?復位電路模塊?? ?24
4.1.3 ?無線控制模塊?? ?24
4.1.4 ?遙控控制模塊?? ?24
4.1.5 ?電機控制模塊?? ?25
4.1.6 ?測距模塊?? ?26
4.1.7 ?攝像頭模塊?? ?26
4.2 ?軟件系統的設計?? ?27
4.2.1 ?總體設計方案?? ?27
4.2.2 ?執行機構的軟件設計?? ?28
4.3 ?本章小結?? ?29
5 ?涉水救援機器人的建模和仿真?? ?30
5.1 ?Solidworks簡介?? ?30
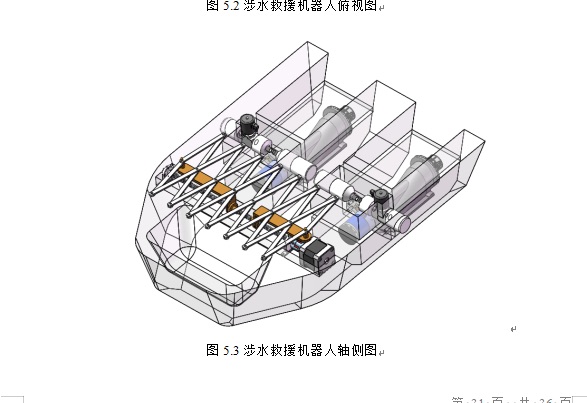
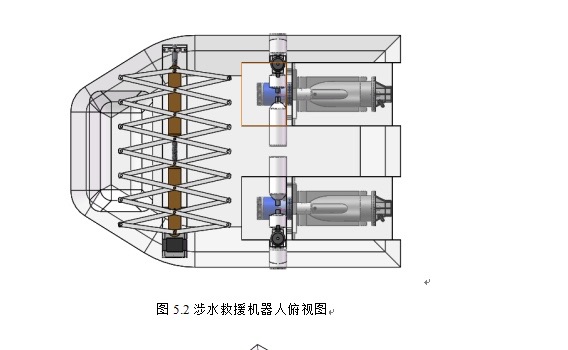
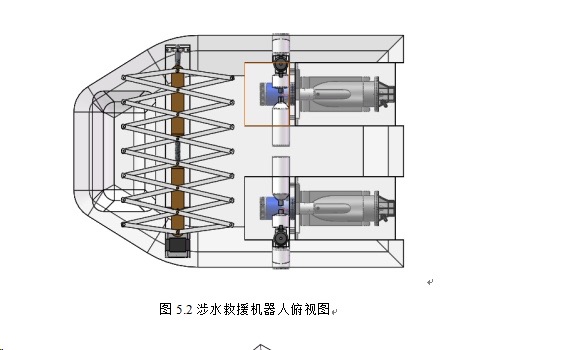
5.2 ?主要零部件三維模型?? ?30
5.3 ?關鍵零部件有的限元分析?? ?32
5.3.1 ?Ansys workbench?? ?32
5.3.2 ?分析的目的?? ?33
5.3.3 ?靜力學分析基礎?? ?33
5.3.4 ?船體材料的選擇?? ?33
5.3.5 ?網格的劃分?? ?33
5.3.6 ?變形應力云圖?? ?34
5.4 ?涉水救援機器人的工藝性分析?? ?35
5.5 ?涉水救援機器人經濟成本分析?? ?35
5.6 ?本章小結?? ?36
6 ?總結和展望?? ?37
6.1 ?總結?? ?37
6.2 ?展望?? ?37
致 ?謝?? ?38
文 獻 參 考?? ?39
1 ?緒論
1.1 選題的背景及意義
長期以來,各種水上災害的發生威脅著人們的生命,水上災害不僅僅出現在洪水等自然災害發生的時候,也出現在日常生活中,遍布于游泳館、河流和湖泊之中。人們的日常生活離不開水,但是水也給人們帶來了巨大的災難。據統計,每年大約有50000人死于溺水[1]。同時由于我國居民的可支配收入增加,人們致力于各種水上游樂項目,同時各種安全問題層出不窮,也會遭遇死亡的威脅。不過,其中最為突出的是未能及時發現溺水者,若能及時發現溺水人員,則最少有30%的改了可以成功營救溺水者,減少不必要的傷亡[2]。
隨著科技的發展,人們發明了各種各樣的救援裝置,但是仍然存在一定的問題,在傳統的救援工作中,如果溺水者離工作人員很遠,救生圈離溺水者距離遠的時候,傳統的救援方式作用就微乎其微[3]。常見的可以用于水上救援的設備主要有救生艇、救生衣和救生圈,和陸地相比,水上的救援工作顯得更為困難,同時研究機構并沒有在水上救援投入大量的研究工作,因此一種新型的救援裝置的出現就顯得格外重要[4]。
針對上述問題,本文提出了一種新型的涉水救援機器人裝置,其可以實現遠程遙控和自主運行兩種不同的工作模式,其主要是由機械結構和電子控制兩部分組成,大致可以分成四個部分[5],分別是起支撐作用的船體部分,起推進作用的船用水下噴氣推進器,救援網裝置和彈射救生圈裝置,彈射裝置將救生圈彈體發射出去后,當彈體接觸到水后,彈體擴大,變成救生圈大小,方便溺水人員的自救。積大的提高了溺水人員救援的效率[6]。
1.2 ?研究的現狀
從上世紀70年代開始,隨著計算機技術的發展,各種電子傳感技術的發展,各種救援機器人應運而生,其中最常見的是履帶式救援機器人,其履帶的運動特點,路面適應能力強,可以廣泛的完成各種救援工作,隨著技術的發展,救援機器人開始被細化[7]。隨著世界科技的發展,救援機器人在未來將具有巨大的發展潛力,將推動世界經濟的發展,帶來一場新的科技革命,機器人技術在未來將會應用到各個領域,推動世界的發展[8][9]。
1.2.1 ?國內的研究現狀
伴隨著我國科技的進步,傳統的救援設備已經無法滿足救援任務的需要[9]。為避免溺水事故的發生,降低因為溺水導致的死亡事故,各個國家的科技人員都在進行水上救援設備的研發,水上救援設備也向著多元化的方向發展,主要是向著水上救援裝置和彈射救援機器人兩個方向展開看深入的研究[10]。
關于水上救援機器人的研發基本都是在我國的高校實驗室內部研發的,我剛著名的高校,華東交通大學經過多年的發展,主要研究的是水上搜救機器人[11],該學校實驗室研制的水面搜尋機器人已經應用到實際的搜救工作中,極大的提高了溺水人員獲救的概率,其主要是通過拋投的方式將救援設備送到溺水人員的身邊,救援機器人才能展開救援,也正是因為該款救援機器人需要在溺水者的附近才能發揮作用,因此其不能大范圍的推廣。為緩解這種現象,研發了一款自動搜尋機器人,如下圖1.1所示[12]。
圖1.1水上救援機器人
上圖所示的救援機器人主要應用的場合有兩個,一個是在普通的水面湖面的旁邊,主要是用來進行避險,另外一個是安裝在船上,當船上的人員出現溺水時,可以快速準確的進行救援,避免溺水人員在水中浪費體力。如果救援機器人投擲的時候,角度出現問題,可以通過遠程遙控進行控制機器人想著溺水者的方向運動,直至溺水者被救起[13][14]。
除了有關水上救援機器人的研發工作之外,我國關于救生圈彈射裝置的研發也取得了一定的成就。我國的山東大學和華中科技大學聯合共同研發的一種新型的救生圈彈射裝置,如下圖1.2所示[15]。采用類似槍的發射裝置,使得救生圈獲得一定的動量,彈射出去,該裝置最大的優點是彈射裝置的射程遠,可以將救生圈發射到50米之外,極大的提高了溺水者獲救的概率[16][17]。
 ?
?
 ?
?
 ?
?
 ?
?
 ?
?
 ?
?
 ?
?
 ?
?



















)