1.新建工程并加載模型
(1)unity中新建3d工程
(2)將機器人模型導入到unity3d中
導入開源Unity-Robotics-Hub的機械臂。
詳細操作參考視頻
ROS Unity URDF Import Testing Robot Motion
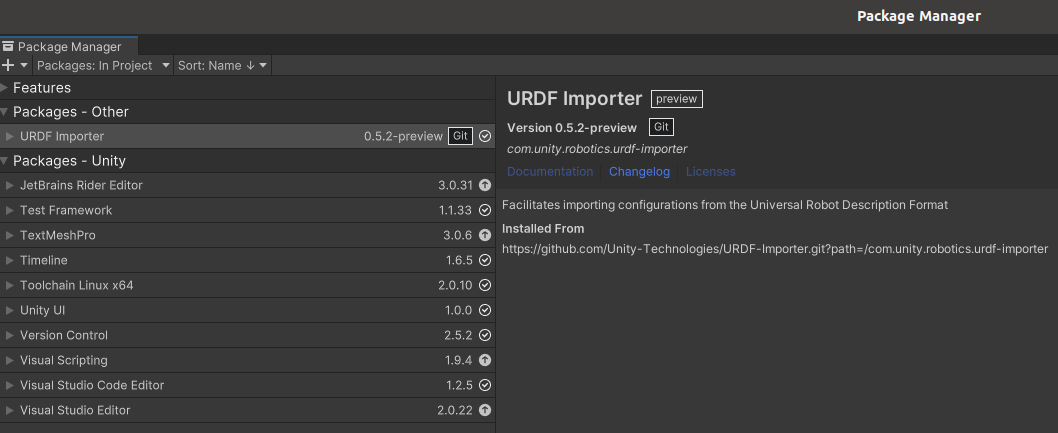
使用 URDF Importer工具
在 Unity 中,可以通過 Package Manager 直接安裝 URDF Importer:
打開 Window > Package Manager。
點擊 “+” 按鈕,選擇 “Add package from git URL…”。
輸入:
https://github.com/Unity-Technologies/URDF-Importer.git?path=/com.unity.robotics.urdf-importer
點擊 “Add” 安裝1。
導入工具成功后如圖
然后將模型文件夾URDF拷貝到Assets文件夾下選擇
niryo_one.urdf,右鍵發現有
Import Robot from URDF選項。
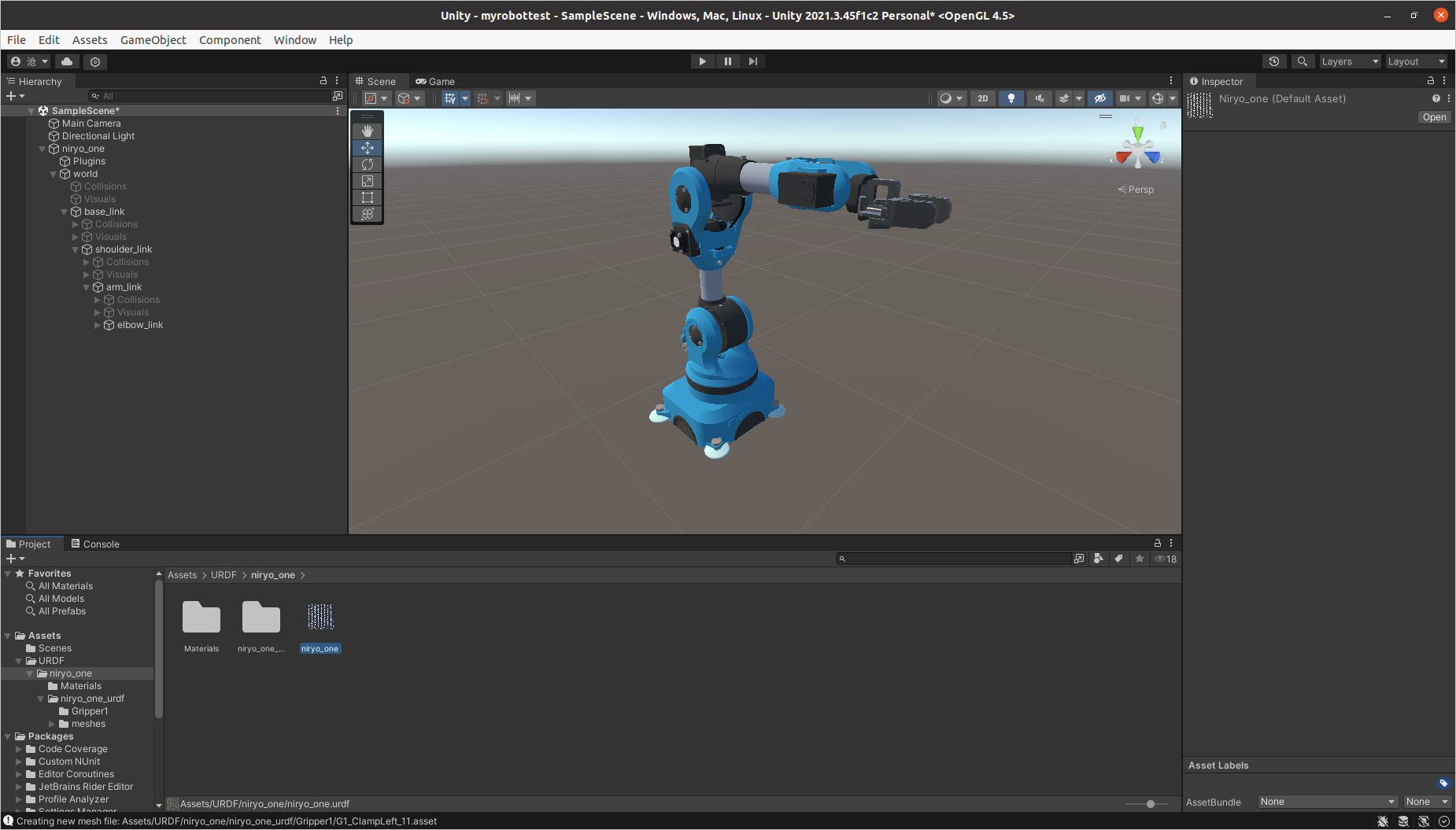
導入成功后如圖。
參考:
(二)Unity3d-ROS聯合仿真:運行Unity-Robotics-Hub



- 如何自定義分組算法?)








數據結構——字典)
)
 筆記250723)
![【windows修復】解決windows10,沒有【相機] 功能問題](http://pic.xiahunao.cn/【windows修復】解決windows10,沒有【相機] 功能問題)


》:我國依舊需要大力注重人工智能人才的培養)
