基于CUDA優化的RANSAC實時激光雷達點云地面分割
摘要: 本文介紹了一個高性能的激光雷達(LiDAR)地面分割項目。該項目基于RANSAC平面估計算法,并通過深度CUDA并行優化,將核心處理時間從近100ms縮短至10ms以內,實現了在復雜場景下的實時、穩定、精確的地面與非地面點云分離。
雖然我仍然在優化這個項目,但當前效果足以應用于絕大多數機器人點云地面分割任務、甚至一些復雜場景。
關鍵詞: CUDA, RANSAC, 點云, 地面分割, PCL, 自動駕駛, 機器人
一、項目簡介
在自動駕駛和機器人領域,對三維點云進行實時、準確的地面分割是環境感知的關鍵一步。它能夠為路徑規劃、障礙物檢測等上層應用提供可靠的基礎。然而,在處理每秒數十萬甚至上百萬點的激光雷達數據時,如何在保證精度的同時達到實時性要求,是一個巨大的挑戰。
本項目旨在解決這一挑戰,實現了一個基于RANSAC算法的地面分割程序。與傳統方法不同,我們利用NVIDIA GPU的并行計算能力,對核心算法進行了深度優化,最終在典型的KITTI數據集中取得了優異的性能表現。
項目倉庫地址:
https://github.com/MengWoods/enhanced-RANSAC-ground-segmentation
二、核心特性
- CUDA并行加速:項目的核心——RANSAC平面估計算法,完全在GPU上實現。通過精心設計的并行協同Kernel,處理速度相比傳統實現有超過10倍的提升。
- 魯棒的估計與回退機制:內置了移動平均緩沖區,當實時RANSAC估計因點云稀疏等原因失敗時,系統能夠自動回退,提供一個基于近期歷史數據的穩定平面結果。
- 真實世界場景優化:算法在開發過程中充分考慮了真實世界的復雜情況,集成了針對垂直墻面等特殊結構影響平面估計的優化邏輯。
- 可配置的預處理流:包含體素濾波(VoxelGrid)、直通濾波(Box Filter)、統計濾波(Statistical Outlier Removal)等多種預處理模塊,可根據場景需求自由組合和配置。
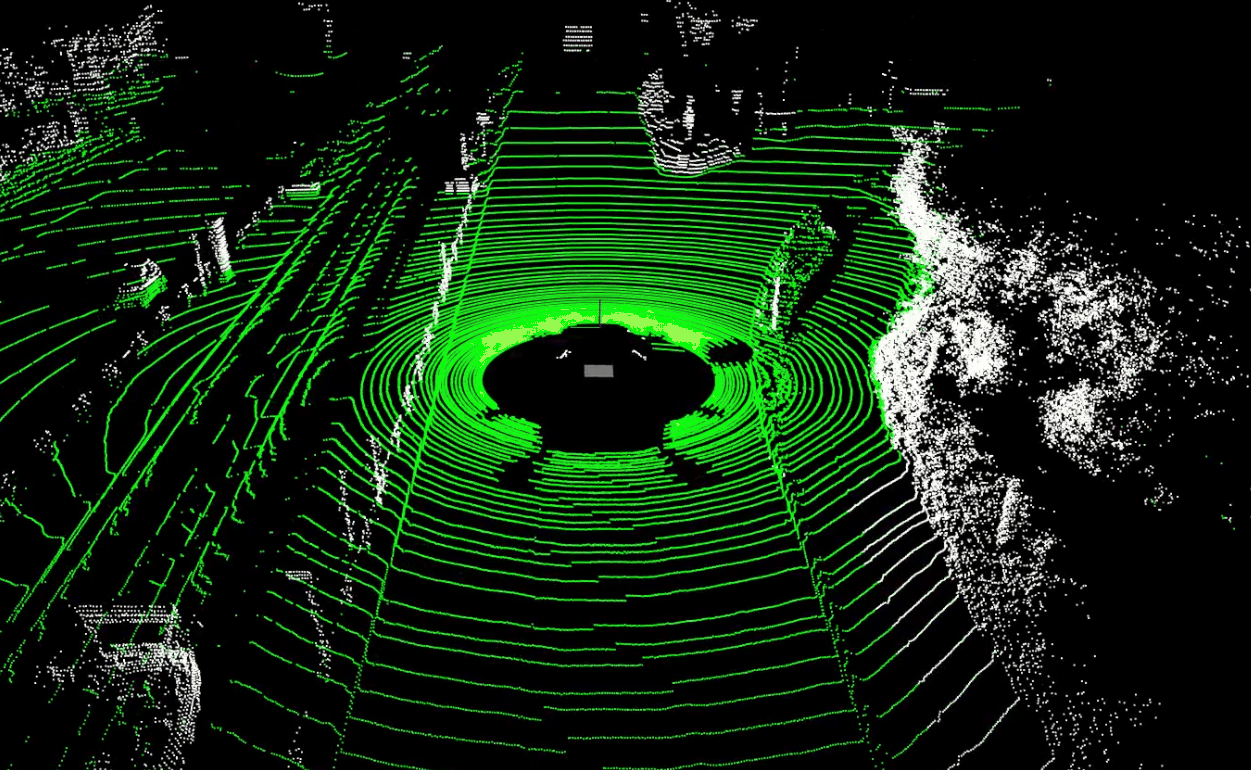
- 實時三維可視化:使用PCL庫(Point Cloud Library)進行實時渲染,直觀地展示地面點(綠色)與非地面點(白色)的分割結果。
- 穩定的幀率控制:主循環帶有頻率控制器,可以穩定在指定頻率(如15Hz)運行,確保輸出的平滑性,滿足機器人系統的實時需求。
- 詳細的性能日志:可選的計時器可以打印出每一幀中各個處理步驟的耗時,方便進行性能分析和調優。
三、性能
------------------- Frame -------------------
[Timer] Box Filter: 5 ms
[Timer] Voxel Filter: 12 ms
[Timer] Noise Filter: 0 ms
[Timer] Ground Estimation: 12 ms
[Timer] Visualization: 0 ms
[Timer] Total Frame Time: 66 ms
說明: Total Frame Time (總幀率時間) 由配置文件中的 frequency 參數控制(此例中為15Hz,即約66ms/幀)。可以看到,所有核心處理步驟(濾波、地面估計)的總和遠小于目標幀時間,證明了算法的高效性。
四、效果演示
我們在KITTI數據集中選取了高速、城市、住宅區三種典型場景進行了測試,算法均表現出高度的穩定性和準確性。

點擊圖片觀看YouTube演示視頻
五、未來計劃 (Roadmap)
本項目仍在積極開發中,未來的工作將聚焦于多個維度的增強。
在性能方面,計劃使用OpenMP并行化技術來加速CPU端的噪聲濾波器。
在分割邏輯上,將增加對“地下點”的識別,并著重優化算法在斜坡、視線遮擋等復雜場景下的魯棒性。
算法層面,將探索引入卡爾曼濾波器(Kalman Filter)來預測平面系數,以獲得更好的時序穩定性。
最后,在高級特性方面,會引入基于距離的概率模型,賦予近處點云更高的權重,從而進一步提升估計的精度。

)





)



 原型與原型鏈)







