線性代數
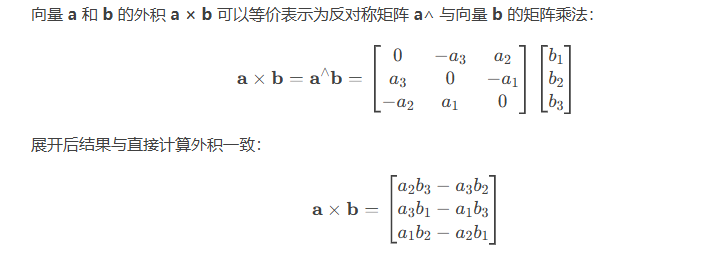
?外積與矩陣乘法的等價性
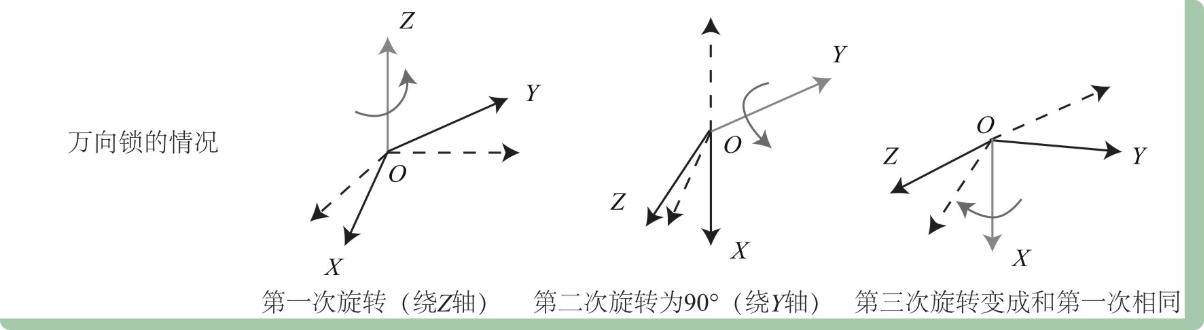
歐拉角的奇異性--萬向死鎖
現象
第二個軸旋轉度,會導致第三個旋轉軸和惡原始坐標軸的第一個旋轉軸重合,導致第一次旋轉與第三次旋轉都使用了同一個軸進行旋轉,也就是本質上旋轉三次,但是只在兩個自由度上旋轉。
eg:
如下圖,第二次的繞Y轉90度之后,X就變到了初始坐標系下的Z軸方向上,第三次的繞X軸旋轉,本質上還是繞空間中的這個坐標系的初始坐標的Z軸的自由度旋轉。丟失了一個自由度。
丟失一個自由度會導致什么問題
(1)旋轉耦合
自由度丟失,導致第三次旋轉的效果丟失,在最終的旋轉矩陣中沒有表現出來,也導致旋轉矩陣中第一次旋轉和第二次旋轉的旋轉角耦合,無法分離出角度。
(2) 控制指令沖突
-
如果系統試圖調整航向(ψ),實際會影響橫滾(?),反之亦然。
-
示例(無人機):
-
飛控發送“增加航向角”指令,但實際可能同時改變橫滾角,導致機體失控
-
解決方案
(1) 使用四元數(Quaternion)
-
優勢:四元數通過4D空間描述旋轉,無奇異性問題,適合連續旋轉和插值(如球面線性插值SLERP)。
-
轉換方法:歐拉角可轉換為四元數處理,但需注意歸一化和插值路徑。











樹莓派攝像頭rpicam-apps)







![[拓撲優化] 1.概述](http://pic.xiahunao.cn/[拓撲優化] 1.概述)