1
2





3

歐拉角是描述三維空間中剛體或坐標系之間相對旋轉的一種方法。它們由三個角度組成,通常表示為:
? 偏航角(Yaw):繞垂直軸(通常是z軸)的旋轉,表示偏航方向的變化。
? 俯仰角(Pitch):繞橫向軸(通常是y軸)的旋轉,表示俯仰角度的變化。
? 翻滾角(Roll):繞縱向軸(通常是x軸)的旋轉,表示翻滾角度的變化。
歐拉角的命名和定義可能會根據不同的應用領域和約定有所不同。例如,在航空領域,偏航、俯仰和翻滾是常用的術語,而在機器人學中,可能會使用不同的軸命名。
歐拉角的優點是直觀易懂,但它們也存在一些局限性,比如在某些情況下會出現“萬向鎖”(Gimbal Lock)問題,即當兩個軸的旋轉角度相同時,會導致一個自由度的丟失,使得旋轉變得不確定。
除了歐拉角,還有其他描述旋轉的方法,如四元數(Quaternion),它能夠避免萬向鎖問題,并且在計算機圖形學和機器人學中廣泛使用。
4









5






6
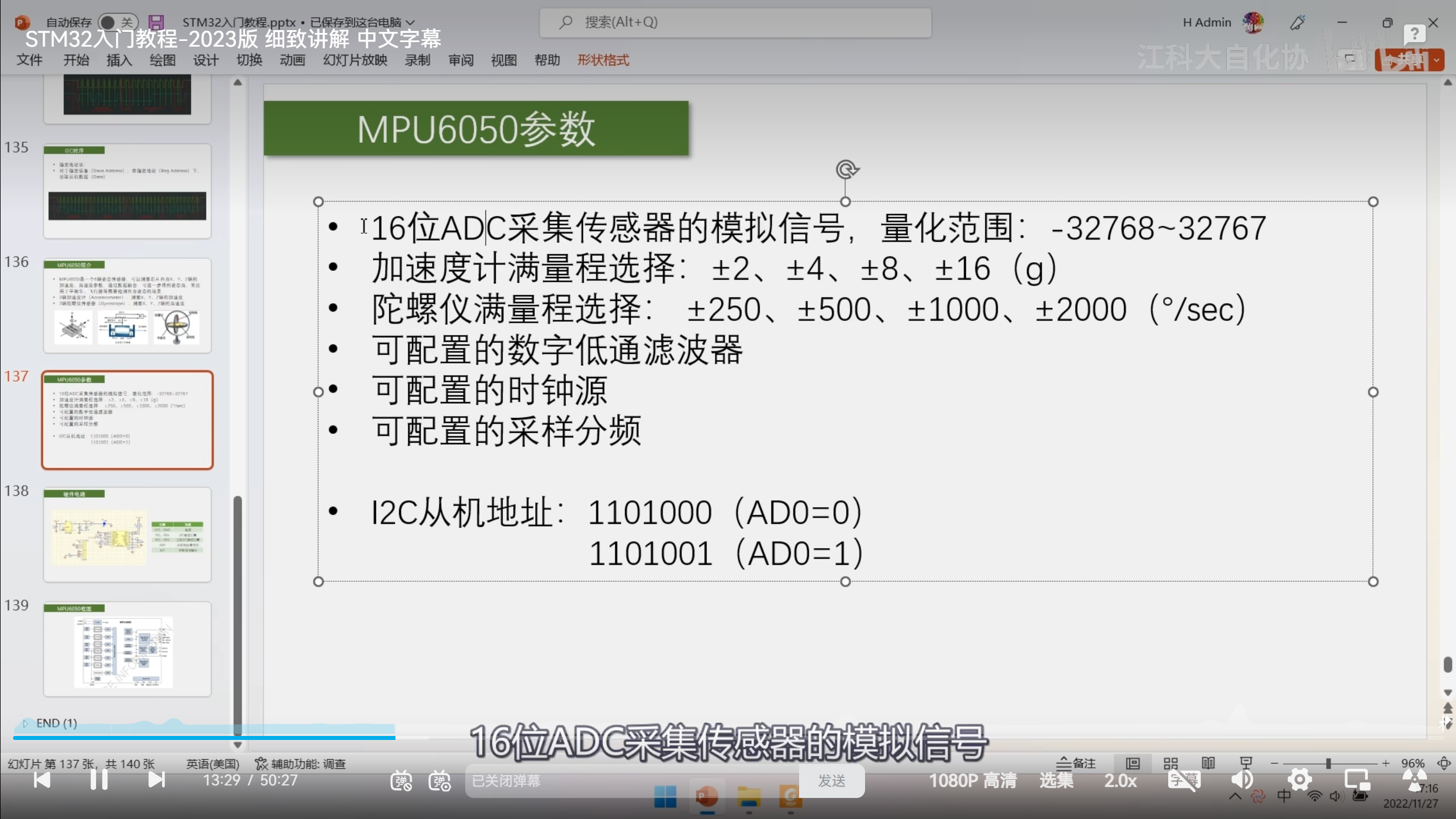
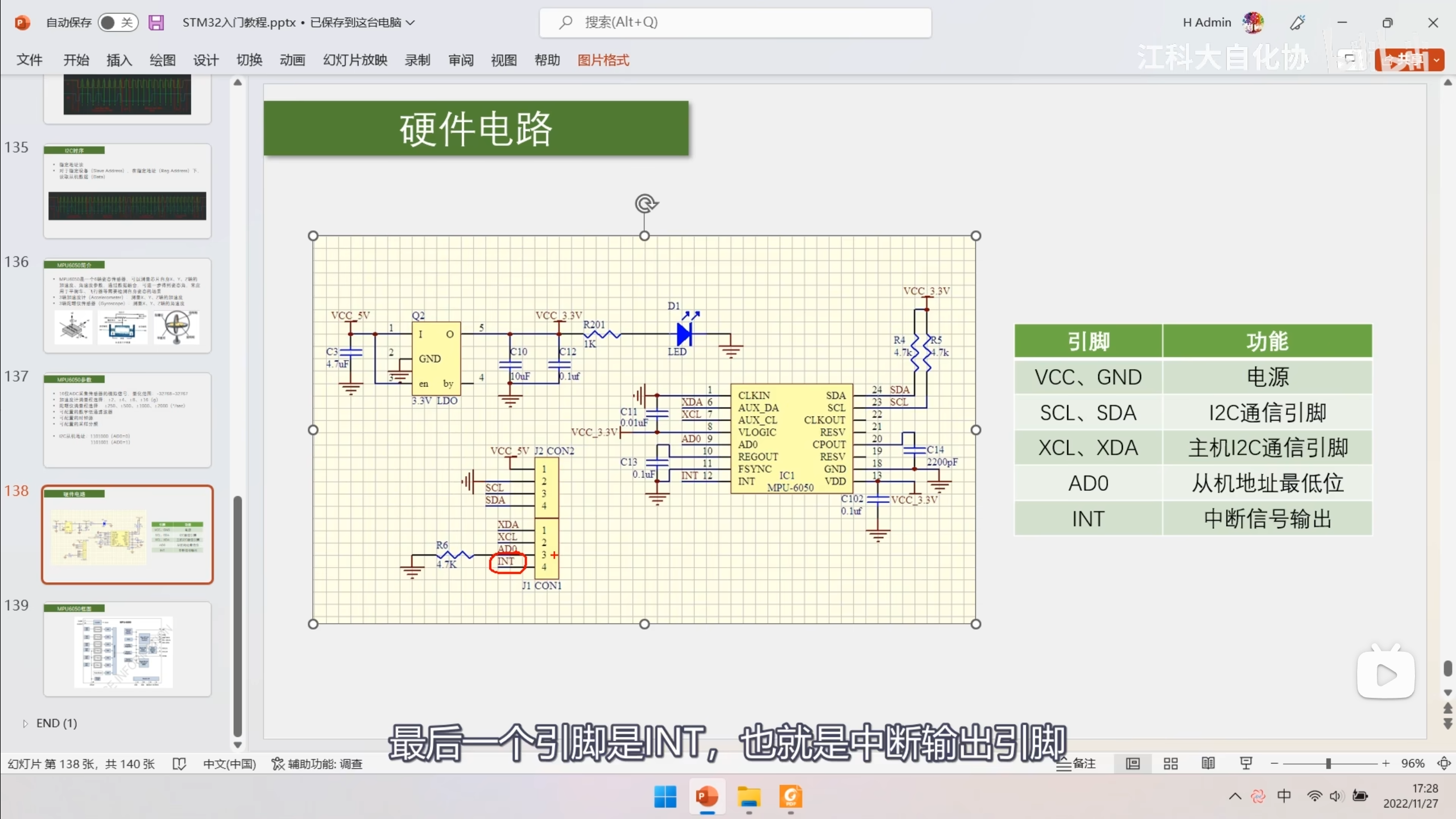
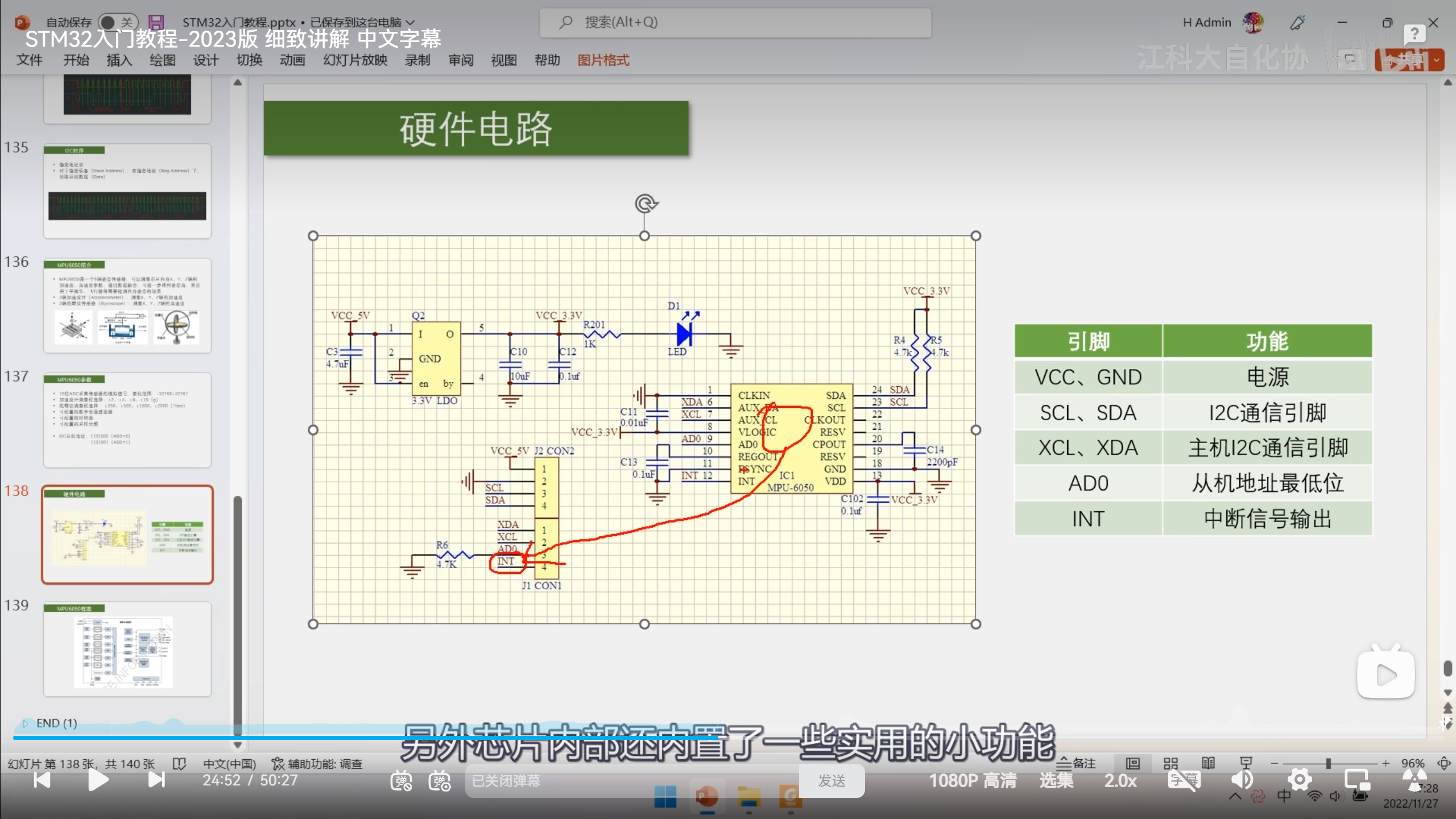
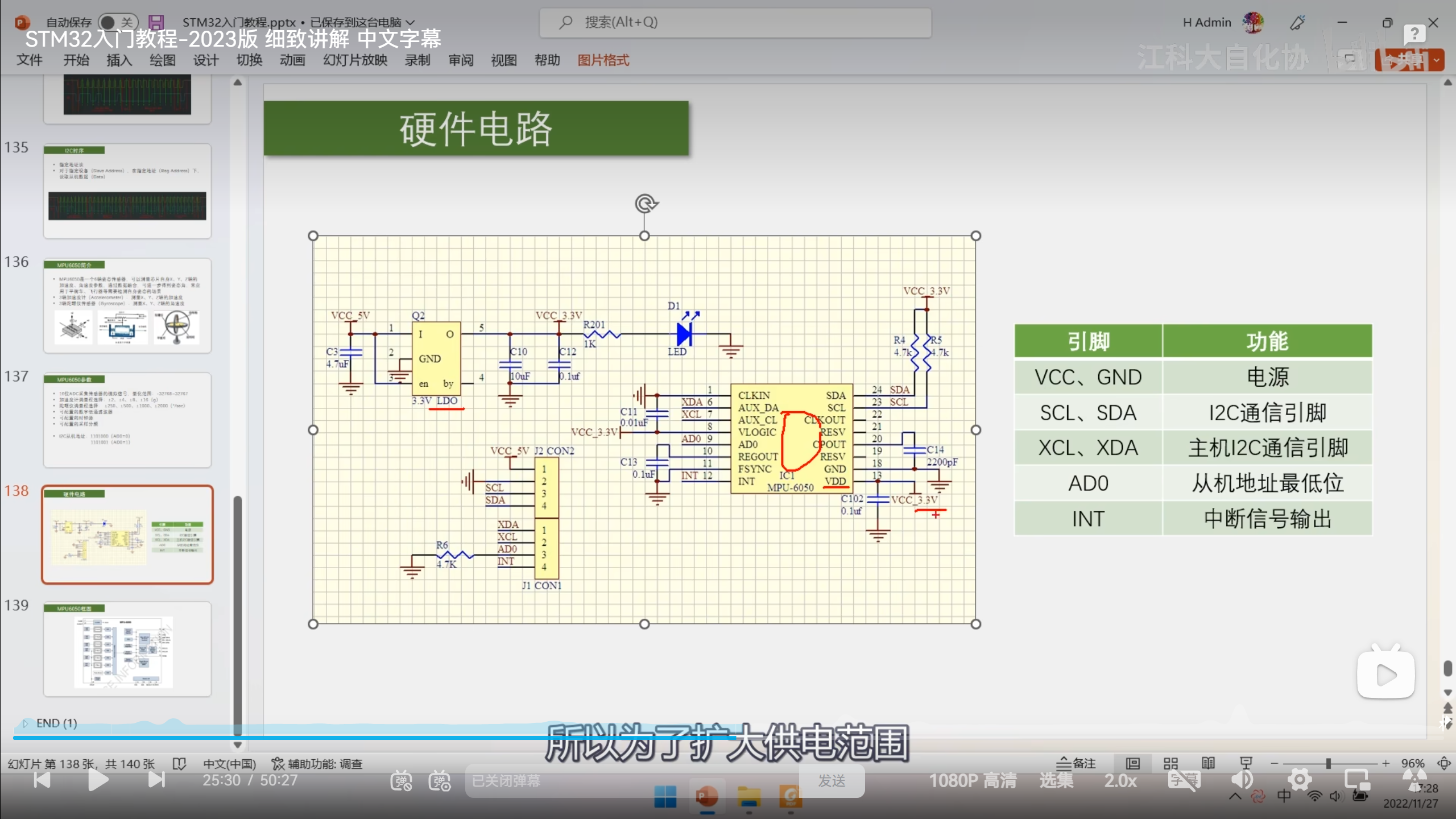
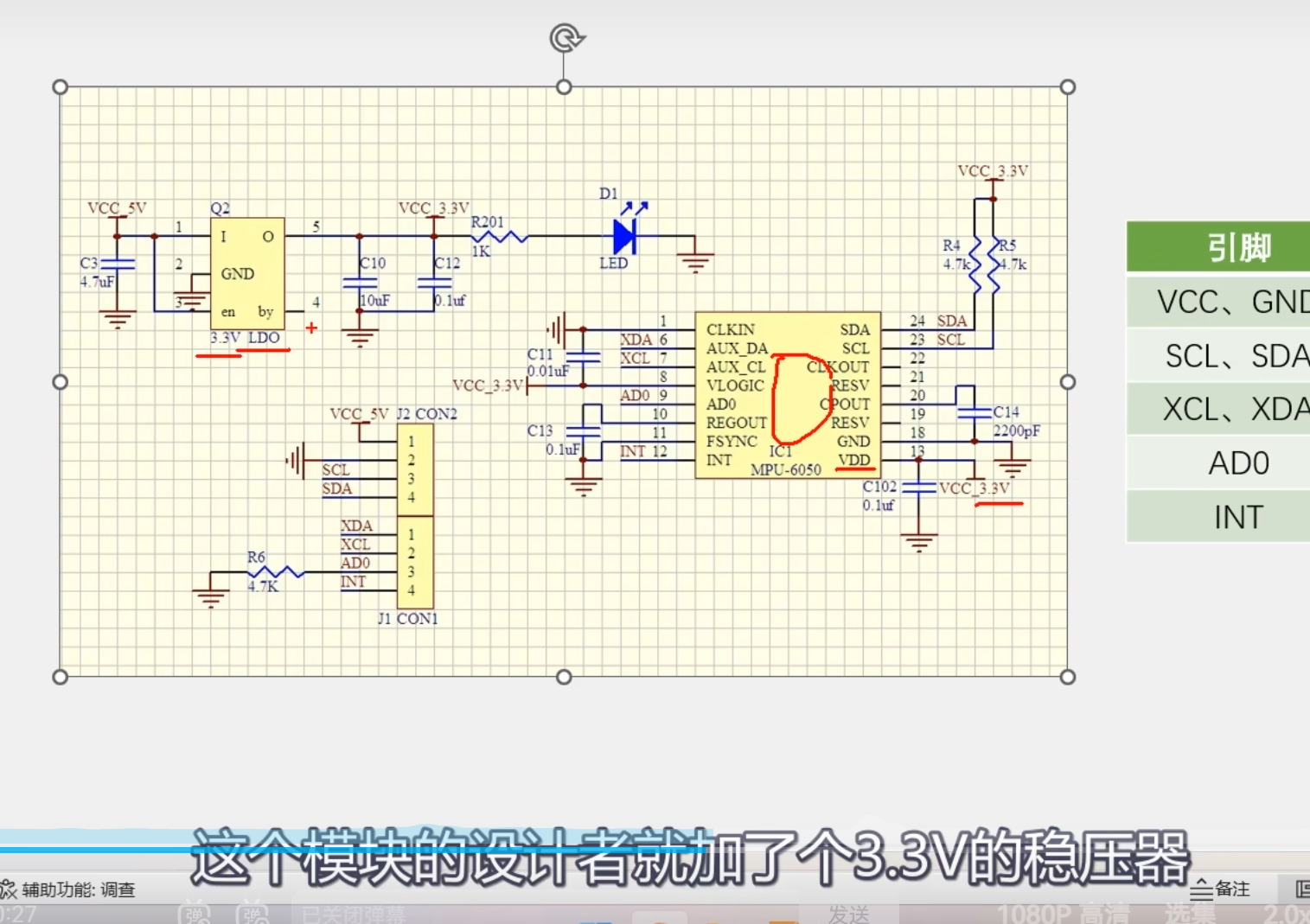
7關于AD0
8
9



10
11

12

13


14




15

16

17




18
19



20

21
22



)









函數meanShiftProc())


)
)


