Towards Scale-Aware Low-Light Enhancement via Structure-Guided Transformer Design(2025,NTIRE)
- 專題介紹
- 一、研究背景
- 二、SG-LLIE方法
- 1.和Retinexformer方案對比
- 2.總體方案及創新點
- 3.詳細方案
- 3.1 結構先驗提取
- 3.2 網絡結構
- 3.3 損失函數
- 三、實驗結果
- 1.定量實驗
- 2.定性實驗
- 3.消融實驗
- 四、總結
Transformer Design(2025,NTIRE))
本文將對 Towards Scale-Aware Low-Light Enhancement via Structure-Guided Transformer Design,這篇暗光增強算法進行講解。參考資料如下:
[1] SG-LLIE 文章
[2] SG-LLIE代碼
專題介紹
在低光照環境下,傳統成像設備往往因畫面昏暗、細節丟失而受限。LLIE(低照度暗光增強)技術應運而生,它通過提升圖像亮度、對比度,減少噪點并恢復色彩細節,讓暗夜變得清晰可見。
LLIE技術從傳統方法如直方圖均衡化、Retinex模型等起步,近年來借助深度學習,尤其是卷積神經網絡(CNN),GAN模型,擴散模型實現了質的飛躍。這些算法能自動學習圖像特征,精準處理低光照圖像,效果顯著優于傳統技術。
本專題將聚焦LLIE技術的核心原理、應用案例及最新進展,讓我們一起見證LLIE如何點亮暗夜,開啟視覺新視界!歡迎一起探討交流!
系列文章如下
【1】ZeroDCE
【2】HVI
【3】CLIP-LIT
【4】GLARE
【5】Retinexformer
一、研究背景
現有低光照圖像增強(LLIE)技術多依賴直接映射(端到端直接學習)或語義、光照圖引導,但因 LLIE 不適定性及語義提取困難,在極低光照下效果受限。為此,作者提出 SG - LLIE,一種結構先驗引導的多尺度 CNN - Transformer 混合框架。其采用光照不變邊緣檢測器提取結構先驗,在 UNet 編碼器的編解碼結構上構建 CNN - Transformer 混合結構引導特征提取器(HSGFE)模塊,并在 HSGFE 中引入結合結構先驗調節增強過程的結構引導 Transformer 模塊(SGTB)。實驗證明,該方法在多個基準測試中實現定量指標和視覺質量最優,在 NTIRE 2025 低光照增強挑戰賽中獲第二名。
二、SG-LLIE方法
1.和Retinexformer方案對比
之前我們介紹過Retinexformer這篇基于光照引導的暗光圖像增強方案。我們可以簡單介紹下兩種方案差異:
Retinexformer 創新性地將照明先驗引入 Transformer,指導反射增強,生成明亮圖像,證實物理先驗在深度學習模型中的潛力。不過,作者認為Retinexformer 通過輕量級神經網絡獲取照明,缺乏光照分量真實值監督,導致在現實場景泛化性差,易出現不自然顏色強度與對比度問題。基于此,作者探索將更穩健的物理先驗融入 LLIE 深度學習模型,旨在克服現有局限,優化增強效果 。說白了就是Retinexformer先驗太過于簡單,魯棒性不足;作者提出了更強的先驗。但是網絡結構思想基本一致,都結合了CNN多尺度特征提取和Transformer基于先驗引導的注意力機制的思想。
2.總體方案及創新點
本文提出 SG-LLIE,一種結構先驗引導的尺度感知 CNNTransformer 框架用于低光照圖像增強。該方案基于 UNet 編碼器 - 解碼器架構,在各層級引入混合結構引導特征提取器(HSGFE)模塊。HSGFE 模塊通過光照不變邊緣檢測器提取穩定結構先驗,借助結構引導 Transformer 塊(SGTB)將其融入恢復過程,并結合擴張殘差密集塊(DRDB)和語義對齊尺度感知模塊(SAM)實現多尺度特征融合。?
其創新點在于:
- 一是構建結構先驗引導的多尺度 CNN-Transformer 混合框架;
- 二是先提取魯棒結構先驗,再通過結構引導交叉注意力將其整合到定制 Transformer,優化增強指導;
- 三是模型在量化指標和視覺效果表現優異,在 NTIRE 2025 低光圖像增強挑戰賽中取得高排名,競爭力突出。
3.詳細方案

SG-LLIE的整體框架如上圖所示。該結構是類似U-Net的架構。在編碼器和解碼器的每一層,采用了混合結構引導特征提取器(HSGFE)模塊。在每個HSGFE中,包含了擴張殘差密集塊(DRDB)和語義對齊尺度感知模塊(SAM),以及結構引導變壓器塊(SGTB)模塊。采用Pixel Unshuffle進行下采樣,Pixelshuffle進行上采樣。SGTB模塊中首先基于顏色不變邊緣檢測器提取結構先驗,然后將這些先驗作為Transformer的指導進行特征整合。
3.1 結構先驗提取
為提取結構先驗,作者采用了《Zero-shot day-night domain adaptation with a physics prior 》和《Lita-gs: Illuminationagnostic novel view synthesis via reference-free 3d gaussian splatting and physical priors》兩篇文章中提出的顏色不變卷積(CIConv)。CIConv通過可學習的尺度感知變換來生成一個歸一化的邊緣響應圖,該圖反映與任務相關的結構。在基于Kubelka-Munk (KM) 反射模型導出的顏色不變表示中,論文采用W表示法,因為它在不同的光照、陰影和反射條件下能提供穩健的邊緣檢測:
W o u t = C I C o n v ( I i n ) , ( 1 ) W_{out }=CIConv\left(I_{in }\right), (1) Wout?=CIConv(Iin?),(1)
其中 I i n I_{in } Iin?表示輸入的低照度(LL)圖像。 W o u t W_{out } Wout?表示結構先驗,隨后將其整合到結構引導變換器模塊(SGTB)中用于指導。CIConv的公式可表示為:
C I C o n v ( I i n ) = l o g ( W 2 ( I i n ) + ? ) ? μ S σ S ( 2 ) CIConv\left(I_{i n}\right)=\frac{log \left(W^{2}\left(I_{i n}\right)+\epsilon\right)-\mu_{\mathcal{S}}}{\sigma_{\mathcal{S}}} (2) CIConv(Iin?)=σS?log(W2(Iin?)+?)?μS??(2)
其中 μ s \mu s μs、 σ s \sigma_{s} σs? 和 ? \epsilon ?分別指樣本均值、標準差和小擾動。
為計算 W ( I i n ) W(I_{i n}) W(Iin?),首先使用高斯顏色模型(高斯顏色模型(Gaussian Color Model)是一種用于圖像邊緣檢測的經典方法,核心思想是利用高斯核函數對圖像的顏色(或灰度)信息進行濾波,通過計算像素點在空間和顏色維度上的梯度變化來檢測邊緣。)獲得初始邊緣檢測器,記為E。然后,使用E推導出第二階段的邊緣檢測器,記為W,如下所示:
W = W x 2 + W λ x 2 + W λ λ x 2 + W y 2 + W λ y 2 + W λ y 2 + W λ λ y 2 , W=\sqrt{W_{x}^{2}+W_{\lambda x}^{2}+W_{\lambda \lambda x}^{2}+W_{y}^{2}+W_{\lambda y}^{2}+W_{\lambda y}^{2}+W_{\lambda \lambda y}^{2}}, W=Wx2?+Wλx2?+Wλλx2?+Wy2?+Wλy2?+Wλy2?+Wλλy2??,
W x = E x E , W λ x = E λ x E , W λ λ x = E λ λ x E ( 4 ) W_{x}=\frac{E_{x}}{E}, W_{\lambda x}=\frac{E_{\lambda x}}{E}, W_{\lambda \lambda x}=\frac{E_{\lambda \lambda x}}{E} (4) Wx?=EEx??,Wλx?=EEλx??,Wλλx?=EEλλx??(4)
這里高斯顏色模型之后采用第二階段邊緣檢測器的目的是:初始邊緣檢測器 E 基于高斯顏色模型生成,雖然能檢測基本邊緣,但對光照變化、陰影和反射等復雜條件的魯棒性不足。低光圖像常存在光照不均、噪聲干擾等問題,單一的高斯模型難以準確捕獲多尺度、多方向的結構信息。通過 E 推導的第二階段邊緣檢測器 W,是對初始邊緣信息的二次增強與細化。
- 多維度特征融合W 的計算公式包含光譜強度的一階空間導數 ( W x , W y ) (W_x, W_y) (Wx?,Wy?)和二階空間導數 ( W λ λ x , W λ λ y ) (W_{\lambda\lambda x}, W_{\lambda\lambda y}) (Wλλx?,Wλλy?),能同時捕捉邊緣的位置、方向和曲率信息。例如,二階導數對圖像局部曲率敏感,可檢測到更細微的結構變化(如紋理、弱邊緣),而一階導數主要響應邊緣強度。
- 光照不變性增強基于 Kubelka-Munk 反射模型的 “W” 表示法,通過對數變換和歸一化(CIConv 公式中的 log ? \log log和標準化操作),降低了光照強度變化對邊緣檢測的影響。即使在低光或不均勻光照下,W 也能穩定表示圖像的固有結構。
公式(4)中各項代表了光譜強度的空間導數。
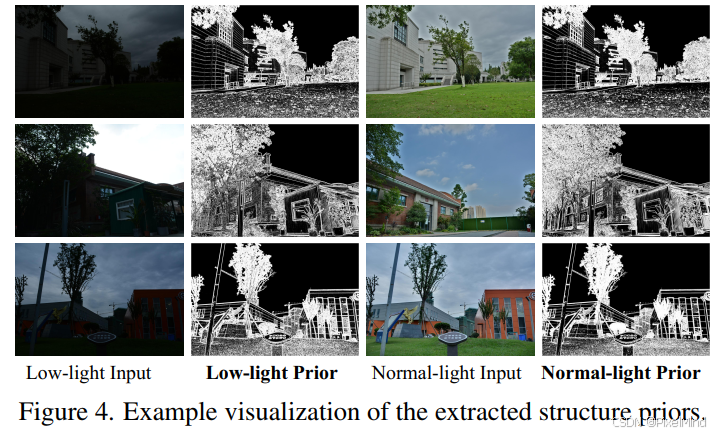
上圖是經過上面方案提取的結構先驗,可以看出,該方案提取的結構先驗能夠穩定表示不同光照條件下圖像的邊緣和結構信息。證明了這個先驗在增強領域的巨大潛力。
3.2 網絡結構
上面介紹了網絡整體結構,這里主要介紹重要模塊。
-
HSGFE模塊:在編碼和解碼過程的每個層級,都部署了HSGFE模塊,用于特征表示學習和結構先驗的整合。
- HSGFE模塊構成:
- 擴張殘差密集塊(Dilated Residual Dense Block, DRDB):首先通過DRDB處理特征以增強局部表示。
- 結構引導Transformer塊(Structure-Guided Transformer Block, SGTB):接著,在SGTB中,將在3.1節提取的結構先驗顯式地注入特征流。
- 語義對齊尺度感知模塊(Semantic-Aligned Scale-Aware Module, SAM):最后,并入SAM以進一步適應尺度多樣性并自適應地融合來自不同尺度的表示。
- HSGFE模塊構成:
-
SGTB模塊構成:如上圖網絡結構中SGTB的放大圖所示,它由三個主要組件構成:
1. 通道級自注意力(Channel-wise Self-Attention, CSA)。 該模塊主要是為了增強特征通道間聯系。
CSA表示為: F o u t = C S A ( L N ( F i n ) ) + F i n F_{out} = CSA(LN(F_{in})) + F_{in} Fout?=CSA(LN(Fin?))+Fin?,其中 F i n , F o u t ∈ R H × W × C F_{in}, F_{out} \in \mathbb{R}^{H \times W \times C} Fin?,Fout?∈RH×W×C 分別是輸入輸出特征圖。
2. 結構引導交叉注意力(Structure-Guided Cross Attention, SGCA)。該模塊主要為了解決傳統低光增強模型經常扭曲輸入圖像原始結構細節的問題。通過將結構先驗融入注意力機制可以更好地保持空間一致性。
輸入特征 F i n ∈ R H × W × C F_{in} \in \mathbb{R}^{H \times W \times C} Fin?∈RH×W×C首先被重塑為序列 X ∈ R H W × C X \in \mathbb{R}^{HW \times C} X∈RHW×C。(Query, Q) 由 X X X 線性投影產生: Q = X W Q T Q = XW_Q^T Q=XWQT?。 (Key, K p K_p Kp?) 和 (Value, V p V_p Vp?) 則由結構先驗提供(下標p代表先驗)。論文中獲取這兩個表示的方法是: K p = X p W K p T , V p = X p W V p T K_p = X_p W_{K_p}^T,V_p = X_p W_{V_p}^T Kp?=Xp?WKp?T?,Vp?=Xp?WVp?T?,其中 X p X_p Xp?是處理后的結構先驗特征序列, W K p T , W V p T W_{K_p}^T,W_{V_p}^T WKp?T?,WVp?T?是可學習的參數矩陣。這里的表述我們可以知道 K p K_p Kp? 和 V p V_p Vp?是基于結構先驗圖 W o u t W_{out} Wout?(經過適當處理以匹配維度)生成的。 結構引導注意力機制公式為: A t t e n t i o n ( Q , K p , V p ) = s o f t m a x ( Q ? K p T λ ) ? V p Attention(Q, K_p, V_p) = softmax(\frac{Q \cdot K_p^T}{\lambda}) \cdot V_p Attention(Q,Kp?,Vp?)=softmax(λQ?KpT??)?Vp?。其中 λ \lambda λ 是一個可學習的參數,用于自適應地調整矩陣乘法的尺度。
通過這種方式,交叉注意力機制不僅能建立遠程依賴關系,還能將結構信息直接融入當前的特征表示中。從這里可以看出,這個結構和Retinexformer中光照引導的注意力模塊非常像。
3. 前饋網絡(Feed-Forward Network, FFN)。
此外,在每個機制之前都應用了層歸一化(Layer Normalization),并應用了三個殘差連接以保留殘差信息。 -
尺度自適應神經架構(SAM)
現實場景中圖像分辨率各異(如 6000 × 4000 或 2992 × 2000),給一致的特征表示帶來挑戰(不同分辨率物體尺度不同)。SAM 利用金字塔式特征提取和跨尺度動態融合來解決此問題。這種結構經常用于圖像分割和目標檢測網絡中,主要是為了提取多尺度特征。
輸入特征圖 F i n , 0 ∈ R H × W × C F_{in,0} \in \mathbb{R}^{H \times W \times C} Fin,0?∈RH×W×C經過雙線性插值生成兩個降采樣特征: F i n , 1 ∈ R H 2 × W 2 × C F_{in,1} \in \mathbb{R}^{\frac{H}{2} \times \frac{W}{2} \times C} Fin,1?∈R2H?×2W?×C和 F i n , 2 ∈ R H 4 × W 4 × C F_{in,2} \in \mathbb{R}^{\frac{H}{4} \times \frac{W}{4} \times C} Fin,2?∈R4H?×4W?×C。 這些多分辨率特征圖通過卷積層獨立處理,得到相應的金字塔表示: Y i n , 0 , Y i n , 1 , Y i n , 2 Y_{in,0}, Y_{in,1}, Y_{in,2} Yin,0?,Yin,1?,Yin,2?。然后進行跨尺度融合:為每個尺度特定的特征圖分配一個可學習的權重矩陣 α i ( i = 0 , 1 , 2 ) \alpha_i (i = 0,1,2) αi?(i=0,1,2)。這些權重通過對三個特征圖分別應用全局平均池化得到。池化后的特征再通過一個多層感知器 (MLP) 以促進自適應有效的跨尺度交互,得到融合權重 β 0 , β 1 , β 2 = M L P ( α 0 , α 1 , α 2 ) \beta_0, \beta_1, \beta_2 = MLP(\alpha_0, \alpha_1, \alpha_2) β0?,β1?,β2?=MLP(α0?,α1?,α2?) 。 最終的融合特征圖 F f F_f Ff?計算如下: F f = F i n , 0 + β 0 ⊙ Y i n , 0 + β 1 ⊙ Y i n , 1 + β 2 ⊙ Y i n , 2 F_f = F_{in,0} + \beta_0 \odot Y_{in,0} + \beta_1 \odot Y_{in,1} + \beta_2 \odot Y_{in,2} Ff?=Fin,0?+β0?⊙Yin,0?+β1?⊙Yin,1?+β2?⊙Yin,2?,其中 ⊙ \odot ⊙ 表示逐元素乘法。
3.3 損失函數
損失函數 ,基于三個不同尺度的輸出圖像—— I ^ 1 \hat{I}_{1} I^1?、 I ^ 2 \hat{I}_{2} I^2?和 I ^ 3 \hat{I}_{3} I^3?——設計損失函數,這些圖像分別對應于解碼器不同級別下的三種不同分辨率的輸出圖像:
L t o t a l = ∑ i = 1 3 L C ( I i , I ^ i ) + λ ? ∑ i = 1 3 L P ( I i , I ^ i ) + γ ? ∑ i = 1 3 L M S ? S S I M ( I i , I ^ i ) , \begin{aligned} L_{total }= & \sum_{i=1}^{3} L_{C}\left(I_{i}, \hat{I}_{i}\right)+\lambda \cdot \sum_{i=1}^{3} L_{P}\left(I_{i}, \hat{I}_{i}\right) \\ & +\gamma \cdot \sum_{i=1}^{3} L_{MS-SSIM}\left(I_{i}, \hat{I}_{i}\right), \end{aligned} Ltotal?=?i=1∑3?LC?(Ii?,I^i?)+λ?i=1∑3?LP?(Ii?,I^i?)+γ?i=1∑3?LMS?SSIM?(Ii?,I^i?),?
其中 L 1 L_{1} L1?、 L P L_{P} LP?和 L M S ? S S I M L_{MS - SSIM} LMS?SSIM?分別表示Charbonnier損失、感知損失和多尺度結構相似性(MSSSIM)損失。加權因子設置為 λ = 0.01 \lambda = 0.01 λ=0.01和 γ = 0.4 \gamma = 0.4 γ=0.4。
三、實驗結果
作者使用由NTIRE 2025低光增強挑戰賽提供的數據集。該數據集包含219張訓練圖像、46張驗證圖像和30張測試圖像。此外,還使用了NTIRE 2024低光增強挑戰賽的訓練集進行微調。
1.定量實驗
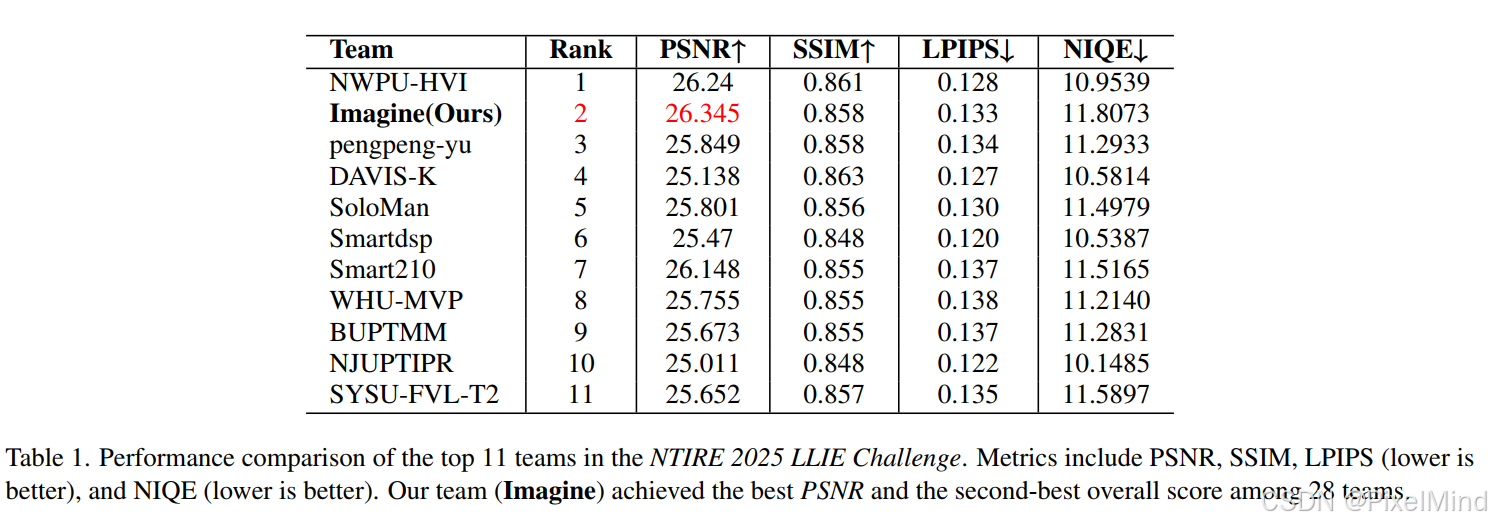
定性實驗1如上圖所示,在NTIRE2025 LLIE比賽的多個參賽隊伍中取得了第二名的成績。
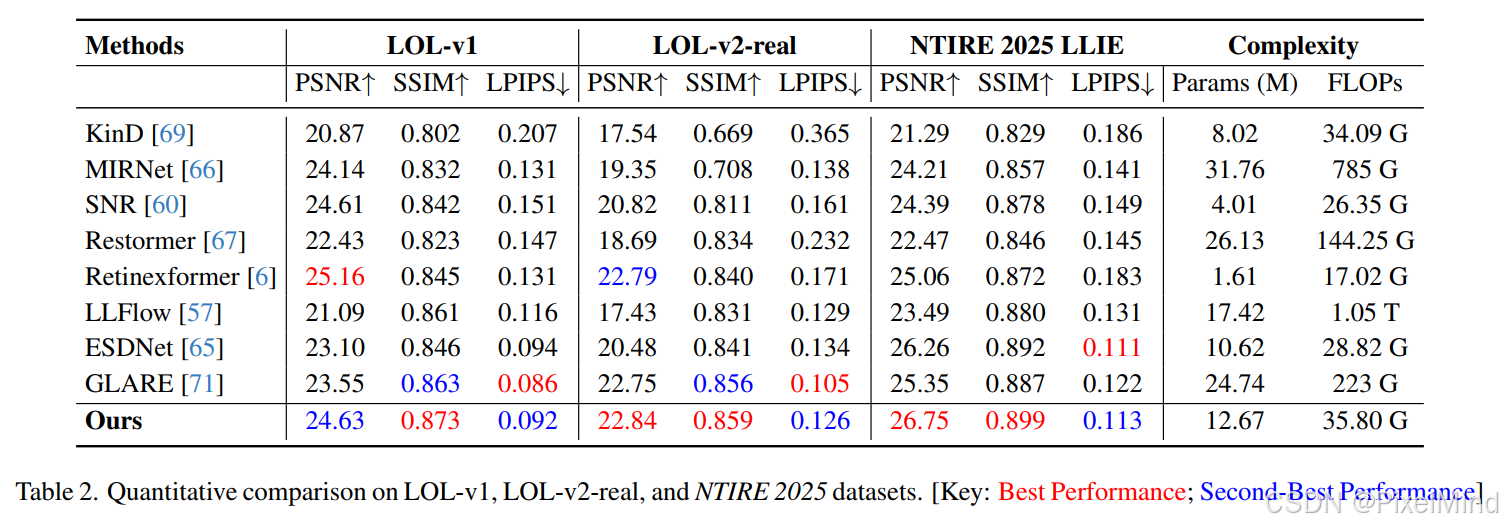
在多個LLIE基準數據集上,和多種LLIE方案對比,本文方案同樣取得了非常好的結果。
2.定性實驗
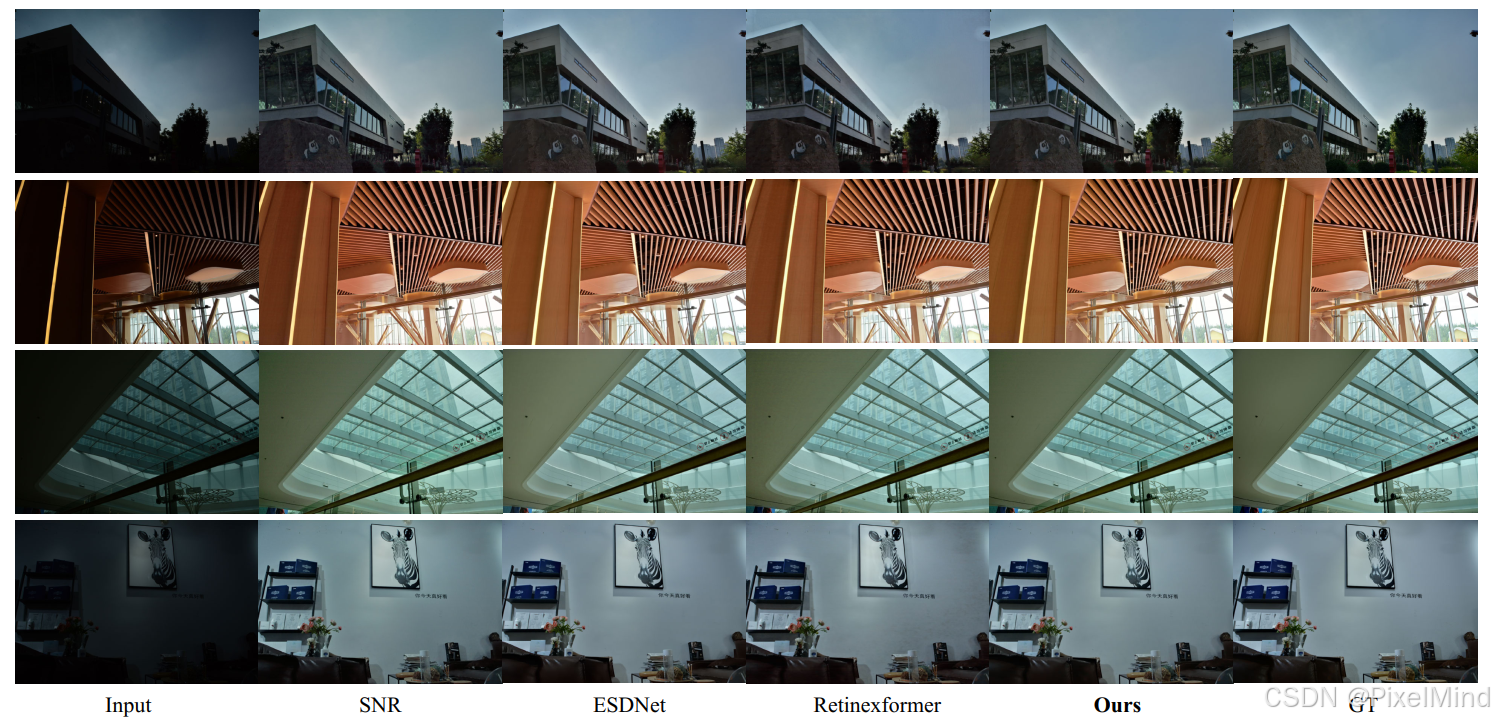
定量實驗可以看出,本文方案增強后在保留細節方面更具有優勢。
3.消融實驗

消融實驗也證明了本文SGCA、SGTB模塊的有效性,以及損失函數MS-SSIM的有效性。
四、總結
本文是NTIRE2025暗光增強比賽中的第二名,提出了一種結構引導先驗的增強方法,網絡結構類似于Retinexformer。
感謝閱讀,歡迎留言或私信,一起探討和交流。
如果對你有幫助的話,也希望可以給博主點一個關注,感謝。





)

)

)






的記錄)

)
