一、基本概念與用途
minAreaRect是OpenCV中用于計算點集的最小面積旋轉矩形的函數。在計算機視覺領域,它常被用于:
- 目標檢測中獲取傾斜對象的邊界框(如傾斜的車牌、文本行、工業零件)
- 形狀分析與識別(如確定物體的主方向)
- 圖像預處理(如校正傾斜的文檔)
- 機器人視覺(如Robomaster比賽中識別裝甲板、燈條)
與軸對齊邊界框(boundingRect)的區別:
boundingRect計算的是完全包含點集的最小矩形,但不考慮旋轉,通常面積更大minAreaRect計算的是可旋轉的最小矩形,能更精確地擬合非軸對齊對象
二、函數定義與參數
1. 函數原型
// C++
RotatedRect minAreaRect(InputArray points);// Python
retval = cv2.minAreaRect(points)
2. 參數說明
- points:輸入點集,可以是:
- C++:
vector<Point>或vector<Point2f> - Python:
numpy.ndarray,形狀為(N, 2),數據類型為float32
- C++:
- 返回值:
RotatedRect對象(C++)或元組((cx, cy), (w, h), angle)(Python)
三、核心知識點講解
1. 算法原理
minAreaRect基于旋轉卡殼算法(Rotating Calipers)實現:
- 計算點集的凸包(Convex Hull)
- 對凸包的每條邊,找到距離該邊最遠的點和垂直方向上的對邊
- 計算當前邊作為底邊時的外接矩形面積
- 旋轉卡殼,遍歷所有可能的方向,記錄最小面積的矩形
該算法的時間復雜度為O(n log n)(凸包計算)+ O(n)(旋轉卡殼),其中n為點的數量。
2. 返回值解析
返回的RotatedRect對象包含三個關鍵屬性:
- center:矩形中心點坐標
(cx, cy) - size:矩形尺寸
(width, height),通常width ≥ height - angle:旋轉角度,范圍為(-90°, 0°],表示矩形的水平軸(長邊)與圖像x軸的夾角,逆時針為正
角度約定說明:
- 當矩形為水平或接近水平時,
angle接近0° - 當矩形為垂直或接近垂直時,
angle接近-90° - OpenCV會自動調整寬高和角度,確保
width ≥ height
3. 輸入點集要求
- 點的數量:至少需要3個點才能構成矩形
- 點的分布:點集應能大致表示一個矩形或近似矩形的形狀
- 數據類型:Python中必須使用
float32類型的NumPy數組
示例代碼(Python):
import cv2
import numpy as np# 創建點集(例如一個傾斜的矩形輪廓)
points = np.array([[10, 10], [50, 0], [90, 40], [50, 90]], dtype=np.float32)# 計算最小面積旋轉矩形
rotated_rect = cv2.minAreaRect(points)# 輸出結果
print(f"中心點: {rotated_rect[0]}") # (cx, cy)
print(f"尺寸: {rotated_rect[1]}") # (width, height)
print(f"角度: {rotated_rect[2]}") # 旋轉角度
4. 頂點坐標計算
通過cv2.boxPoints()函數獲取矩形的四個頂點坐標,順序為:
- 左上角
- 右上角
- 右下角
- 左下角
# 獲取頂點坐標
box = cv2.boxPoints(rotated_rect)
box = np.int0(box) # 轉換為整數坐標# 繪制矩形
image = np.zeros((100, 100, 3), dtype=np.uint8)
cv2.drawContours(image, [box], 0, (0, 255, 0), 2)
5. 特殊情況處理
- 共線點:如果所有點共線,返回的矩形會退化為一條線段,高度為0
- 單點/兩點:無法形成矩形,可能拋出異常或返回無效結果
- 噪聲點:離群點可能影響結果,建議預處理時進行濾波
四、與其他函數的對比
| 函數 | 功能描述 | 適用場景 | 返回類型 |
|---|---|---|---|
minAreaRect | 最小面積旋轉矩形 | 傾斜對象邊界框 | RotatedRect |
boundingRect | 軸對齊邊界框 | 快速包圍盒 | Rect |
fitEllipse | 橢圓擬合 | 近似橢圓的形狀 | RotatedRect |
minEnclosingCircle | 最小包圍圓 | 圓形對象檢測 | (center, radius) |
五、實際應用示例
1. 目標檢測中的傾斜邊界框
import cv2
import numpy as np# 讀取圖像并檢測輪廓
image = cv2.imread("armor_plate.jpg")
gray = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)
_, thresh = cv2.threshold(gray, 100, 255, cv2.THRESH_BINARY)
contours, _ = cv2.findContours(thresh, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE)# 對每個輪廓計算最小面積矩形并繪制
for contour in contours:if len(contour) >= 5: # 確保有足夠的點rotated_rect = cv2.minAreaRect(contour)box = cv2.boxPoints(rotated_rect)box = np.int0(box)cv2.drawContours(image, [box], 0, (0, 255, 0), 2)cv2.imshow("Result", image)
cv2.waitKey(0)
2. 形狀方向分析
# 獲取旋轉矩形的主方向
def get_orientation(contour):rotated_rect = cv2.minAreaRect(contour)angle = rotated_rect[2]# 將角度轉換為0-180度范圍if rotated_rect[1][0] < rotated_rect[1][1]: # 如果寬小于高angle = angle + 90return angle# 示例使用
orientation = get_orientation(contour)
print(f"物體主方向角度: {orientation} 度")
3. 圖像校正
# 校正傾斜的文檔
def correct_skew(image):gray = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)edges = cv2.Canny(gray, 50, 150)# 檢測輪廓并找到最大輪廓contours, _ = cv2.findContours(edges, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE)if not contours:return imagelargest_contour = max(contours, key=cv2.contourArea)rotated_rect = cv2.minAreaRect(largest_contour)# 獲取旋轉矩陣并應用仿射變換angle = rotated_rect[2]rows, cols = image.shape[:2]M = cv2.getRotationMatrix2D(rotated_rect[0], angle, 1)corrected = cv2.warpAffine(image, M, (cols, rows))return corrected
六、注意事項與常見誤區
-
角度的解釋:
- 返回的角度范圍是(-90°, 0°],但實際應用中可能需要轉換為更直觀的角度(如0-180°)
- 角度是相對于矩形的長邊,而非短邊
-
寬高的不確定性:
- OpenCV會自動調整寬高,確保
width ≥ height - 如果需要保持原始對象的寬高對應關系,可能需要額外處理
- OpenCV會自動調整寬高,確保
-
浮點精度問題:
minAreaRect返回浮點坐標,繪制時需轉換為整數- 使用
np.int0()而非np.int32()可避免某些精度問題
-
性能考慮:
- 對于大量點集,可先進行降采樣或輪廓近似(如
approxPolyDP) - 實時應用中可考慮緩存結果或優化算法
- 對于大量點集,可先進行降采樣或輪廓近似(如
七、數學原理補充
1. 旋轉卡殼算法詳解
旋轉卡殼算法通過以下步驟找到最小面積外接矩形:
- 計算點集的凸包
- 初始化兩對頂點:底邊的兩個端點和對應的最高點、最低點
- 旋轉卡殼,依次以凸包的每條邊為底邊
- 對每條底邊,找到最高點和最低點,計算當前矩形面積
- 記錄最小面積的矩形參數
2. 頂點坐標推導
給定旋轉矩形的中心點(cx, cy)、寬w、高h和角度θ,四個頂點坐標可通過以下公式計算:
θ_rad = θ * π / 180 # 轉換為弧度# 四個頂點相對于中心點的偏移量
dx1 = (w/2) * cos(θ_rad) - (h/2) * sin(θ_rad)
dy1 = (w/2) * sin(θ_rad) + (h/2) * cos(θ_rad)dx2 = (w/2) * cos(θ_rad) + (h/2) * sin(θ_rad)
dy2 = (w/2) * sin(θ_rad) - (h/2) * cos(θ_rad)# 四個頂點的絕對坐標
pt1 = (cx + dx1, cy + dy1) # 左上角
pt2 = (cx + dx2, cy + dy2) # 右上角
pt3 = (cx - dx1, cy - dy1) # 右下角
pt4 = (cx - dx2, cy - dy2) # 左下角
八、跨語言差異
| 特性 | C++ | Python |
|---|---|---|
| 輸入類型 | vector<Point> | numpy.ndarray (float32) |
| 返回類型 | RotatedRect 對象 | 元組 ((cx, cy), (w, h), angle) |
| 頂點獲取 | rRect.points(vertices) | cv2.boxPoints(rRect) |
| 坐標精度 | 浮點型 | 浮點型(需手動轉換為整數) |
九、性能優化建議
-
預處理點集:
- 使用
approxPolyDP進行輪廓近似,減少點的數量 - 過濾離群點,避免干擾結果
- 使用
-
緩存計算結果:
- 對于靜態或變化緩慢的場景,避免重復計算相同點集的最小矩形
-
并行處理:
- 對于多目標場景,可并行計算每個目標的最小矩形
-
算法選擇:
- 對于近似矩形的形狀,可先使用輪廓分析篩選,再應用
minAreaRect
- 對于近似矩形的形狀,可先使用輪廓分析篩選,再應用
區分boundingRect、minEnclosingCircle
在OpenCV中,boundingRect、minAreaRect和minEnclosingCircle是三個常用的輪廓處理函數,它們的作用和適用場景各有不同:
-
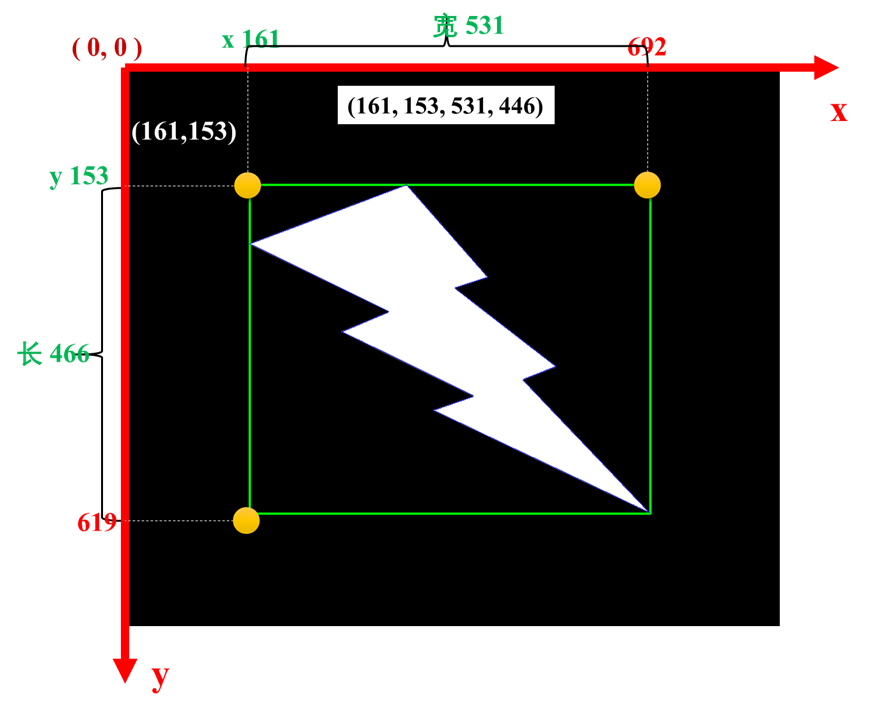
boundingRect
- 功能:計算輪廓的垂直外接矩形。
- 特點:矩形的邊與圖像坐標軸平行,不考慮輪廓的旋轉角度,因此可能不是面積最小的外接矩形。
- 返回值:返回一個包含矩形左上角坐標(x,y)和寬高(w,h)的Rect對象。
-
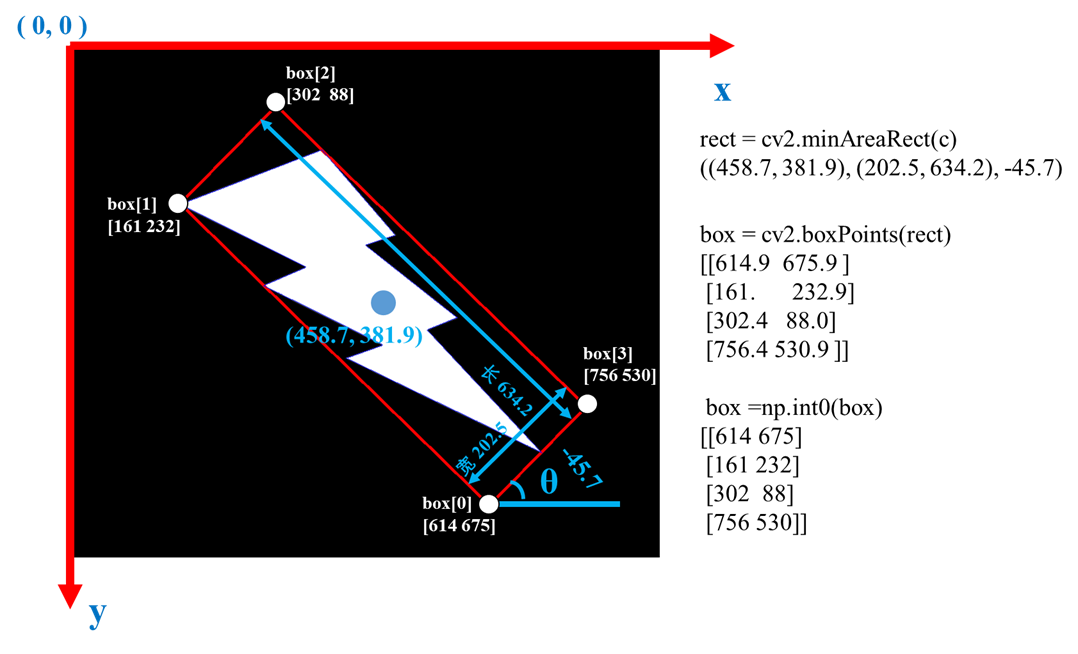
minAreaRect
- 功能:計算輪廓的最小面積外接矩形。
- 特點:考慮了輪廓的旋轉角度,因此可能是傾斜的矩形,其面積通常小于等于boundingRect的結果。
- 返回值:返回一個RotatedRect對象,包含矩形中心點坐標、寬高和旋轉角度。
-
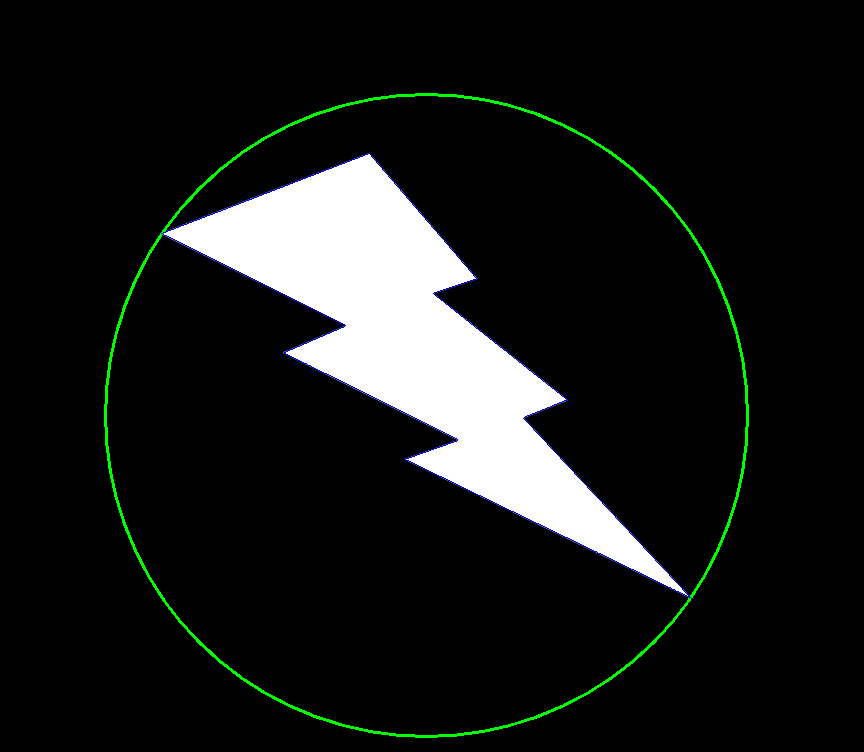
minEnclosingCircle
- 功能:計算能夠完全包圍輪廓的最小圓。
- 特點:基于最小二乘法擬合,返回的圓不一定經過所有輪廓點,但能保證最小化圓的半徑。
- 返回值:返回圓心坐標和圓半徑。
應用場景對比:
- boundingRect:適用于對方向不敏感的場景,如粗略定位目標。
- minAreaRect:適用于需要考慮目標真實方向的場景,如物體姿態估計、OCR文本檢測等。
- minEnclosingCircle:適用于分析圓形或近似圓形目標,如檢測球類、硬幣等。









)
)








