前面我們準備好了COCO格式的數據集:將YOLO格式的數據集轉換為mmdetection格式-CSDN博客![]() https://blog.csdn.net/qq_54708219/article/details/148224187?spm=1001.2014.3001.5501
https://blog.csdn.net/qq_54708219/article/details/148224187?spm=1001.2014.3001.5501
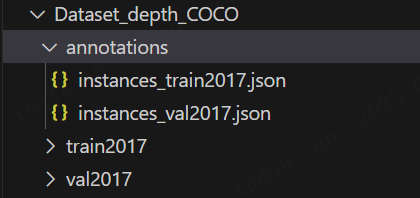
下面我們使用MMdetection開始訓練。
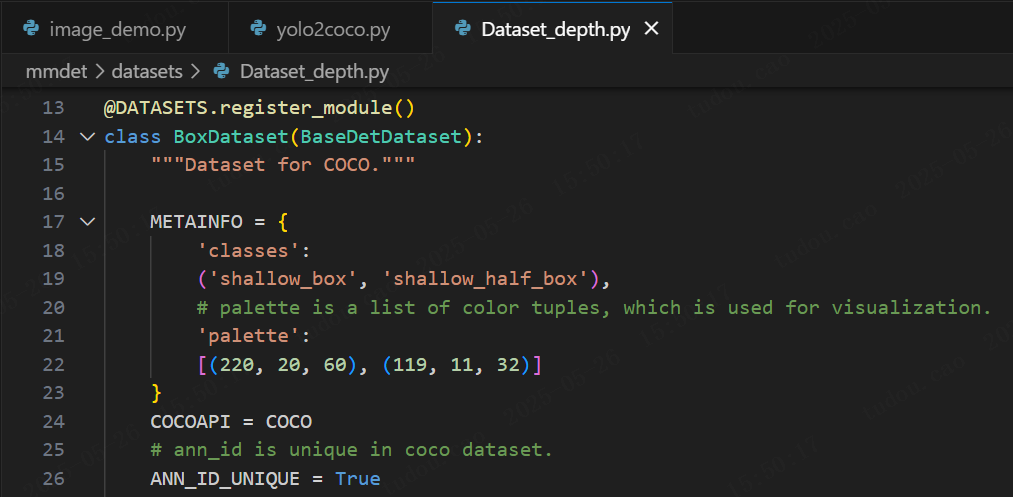
1.創建新的數據集類
首先,在mmdet/datasets里,創建屬于自己的數據集文件。因為數據集是coco格式,可直接復制coco.py,文件名更改為Dataset_depth.py,然后把里面的標簽改掉。我們需要把coco.py中的類名、數據集中的類別和標注的顏色換成自己的數據集的類名。這里,類名我修改為BoxDataset,數據集只有兩個類別:'shallow_box'和'shallow_half_box',下面的palette是調色板,保持和classes長度一樣即可,里面的顏色可以填成自己喜歡的,這里是直接保留了前兩個后面全部刪除:
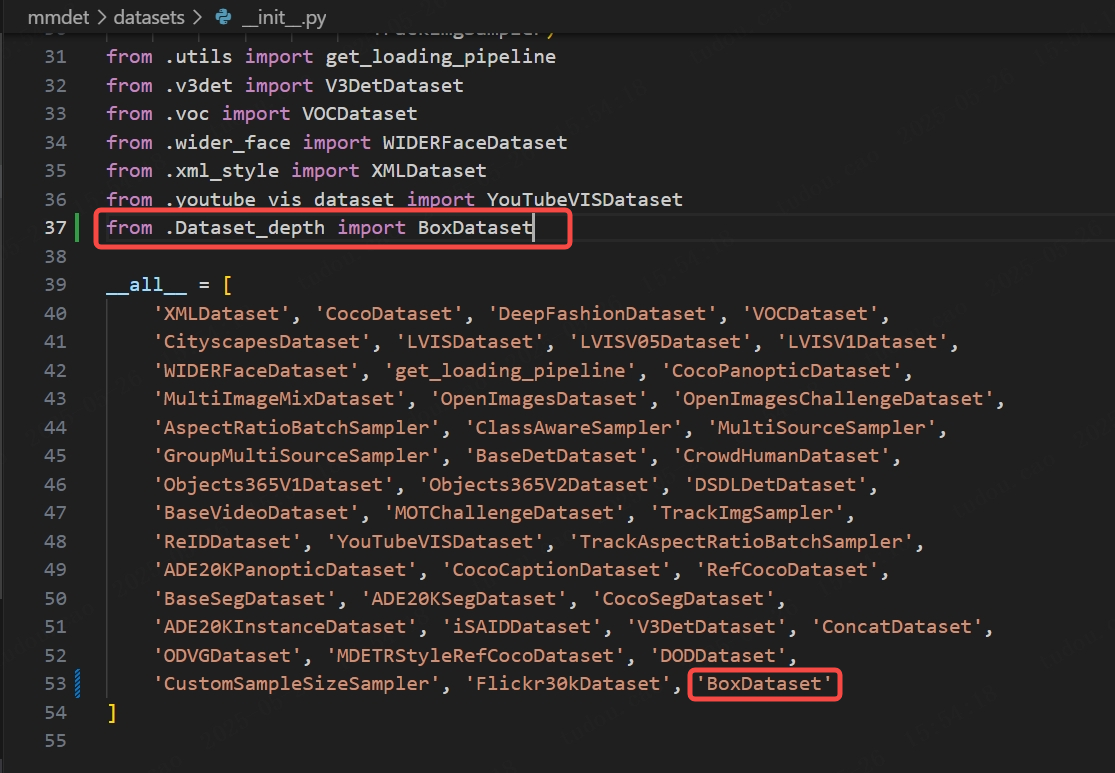
2.錄入數據集
在mmdet/datasets/init.py中仿照coco的格式把剛才創建的數據集類進行錄入:
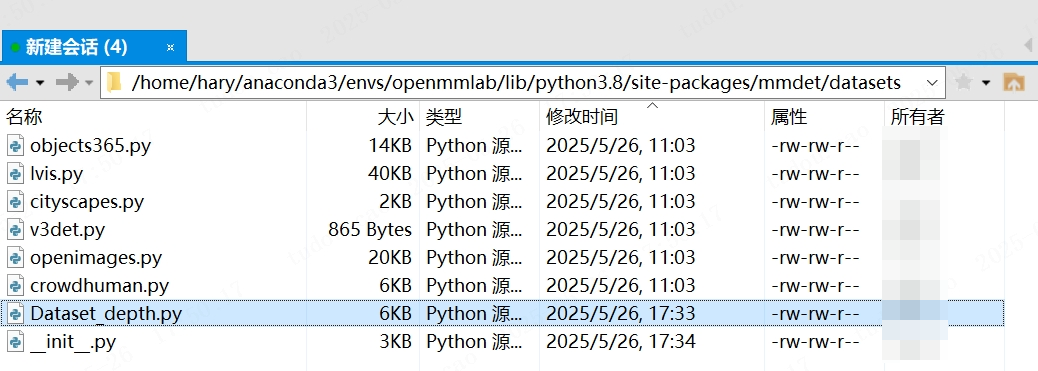
注意:如果注冊完成訓練仍然報KeyError,看一下報錯的文件路徑,可能是導入數據集類的時候一直是conda虛擬環境上的,而不是自己修改后的。解決方案就是順著報錯路徑(conda環境路徑)重新注冊一遍數據集:
3.生成完整的配置文件
在configs文件夾下選擇你想訓練的模型,例如,我這里選擇configs/deformable_detr/deformable-detr_r50_16xb2-50e_coco.py,然后在終端運行以下命令:
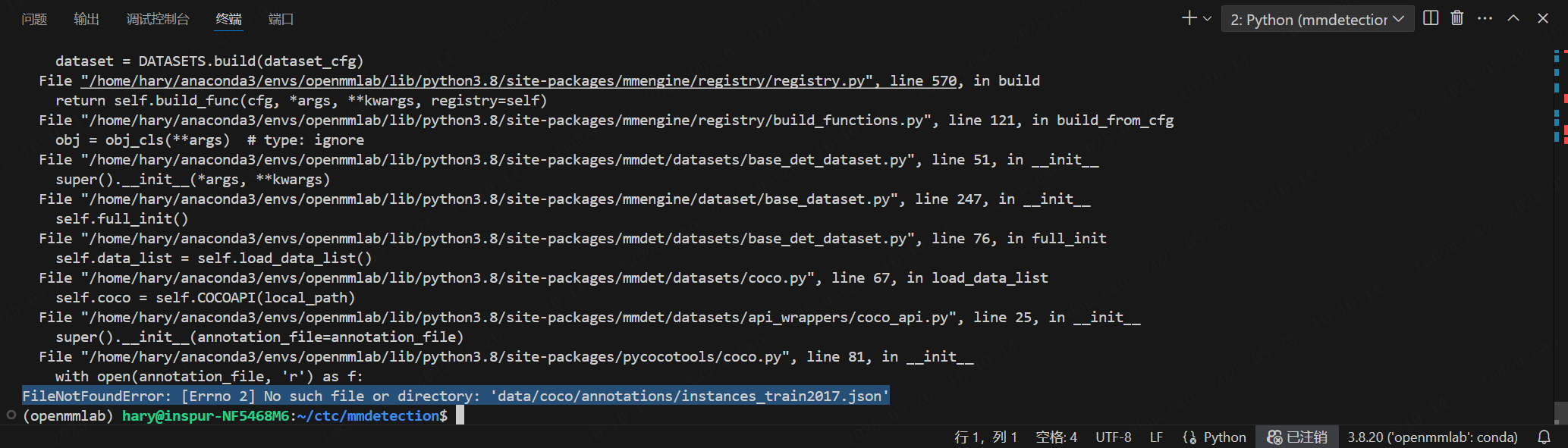
python tools/train.py <你所選擇的模型路徑>python tools/train.py configs/deformable_detr/deformable-detr_r50_16xb2-50e_coco.py此時運行會報錯,因為他會自動尋找coco數據集而不是自己的(我自己沒有下載coco數據集):
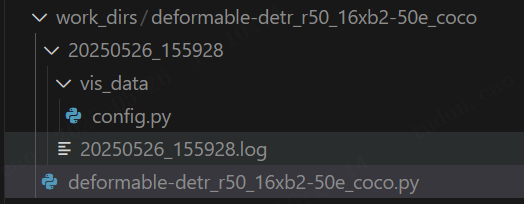
但是在當前目錄下會生成work_dir文件夾,里面包含了完整的模型配置文件work_dirs/deformable-detr_r50_16xb2-50e_coco/deformable-detr_r50_16xb2-50e_coco.py:
4.修改生成的配置文件
接下來對work_dirs/deformable-detr_r50_16xb2-50e_coco/deformable-detr_r50_16xb2-50e_coco.py進行修改:
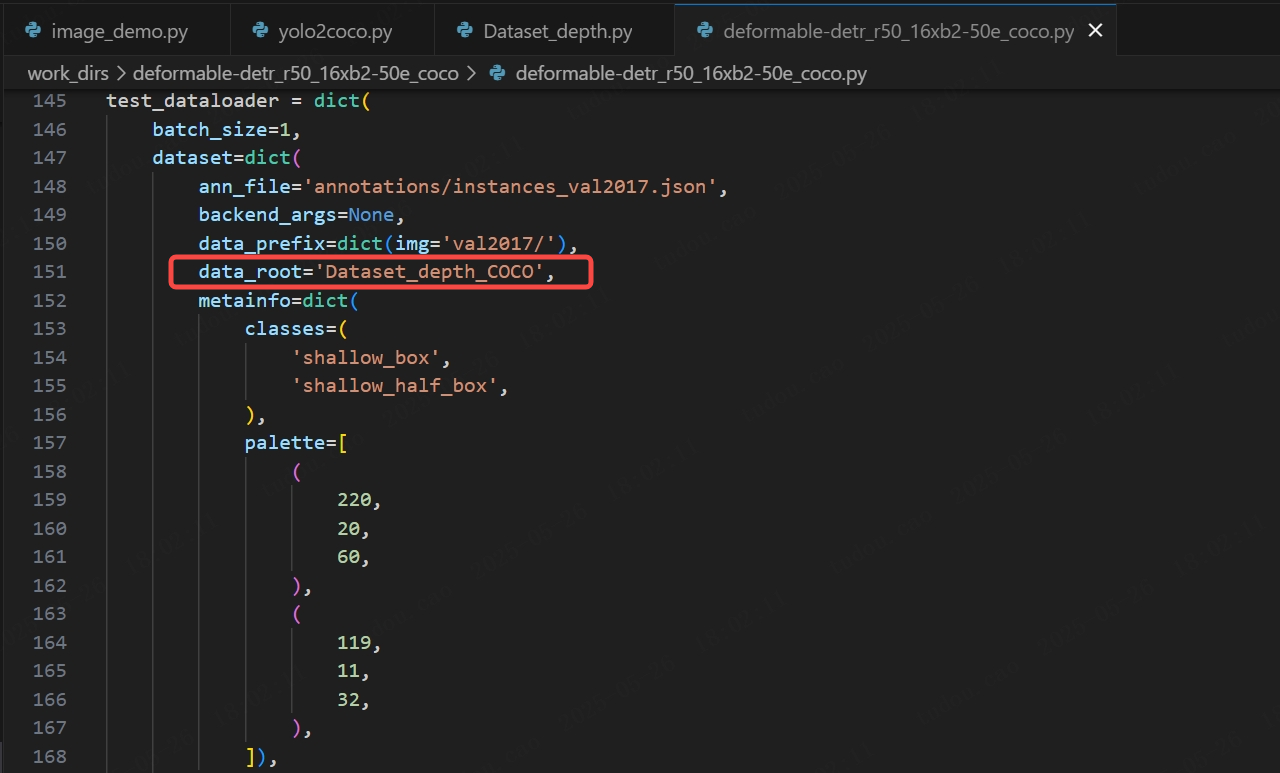
(1)數據集位置和數據集類:修改data_root(數據集相對路徑)和dataset_type(之前注冊的數據集類名):

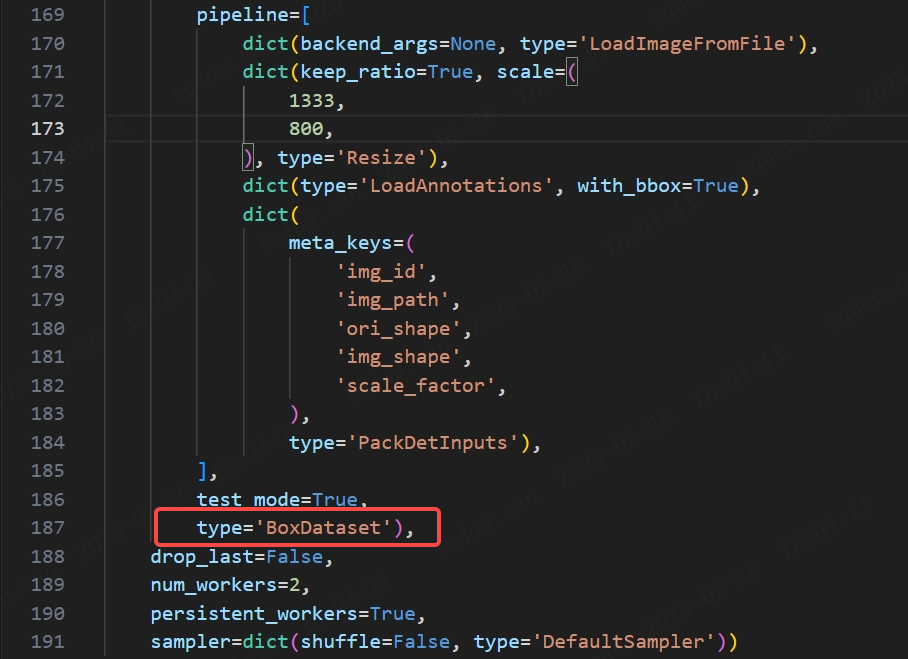
同時在train_dataloader,test_dataloader,val_dataloader中修改data_root和type:
同時還修改一下val_evaluator和test_evaluator的ann_file:

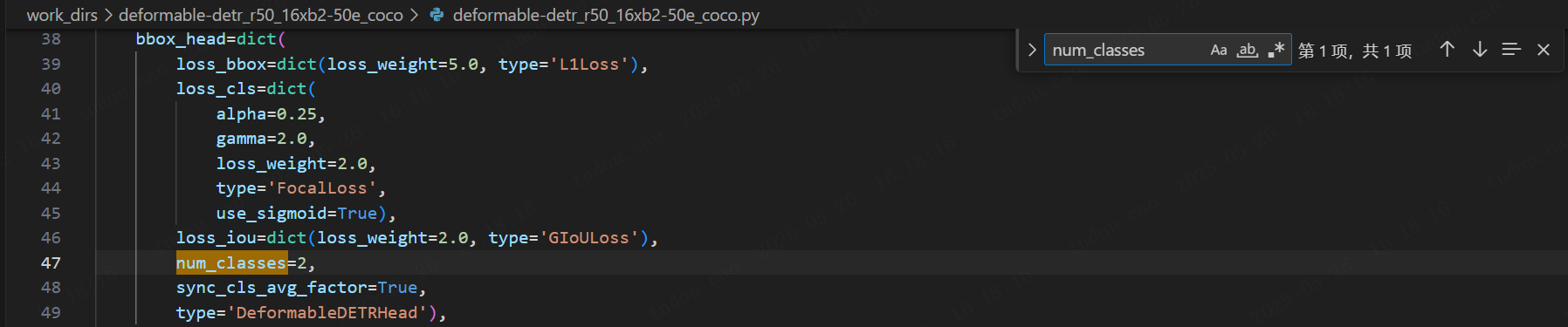
(2)修改數據集類別數:ctrl+F召喚出搜索框,輸入num_classes,把coco數據集的80類改為自己的數據集類別個數(我的是2類):
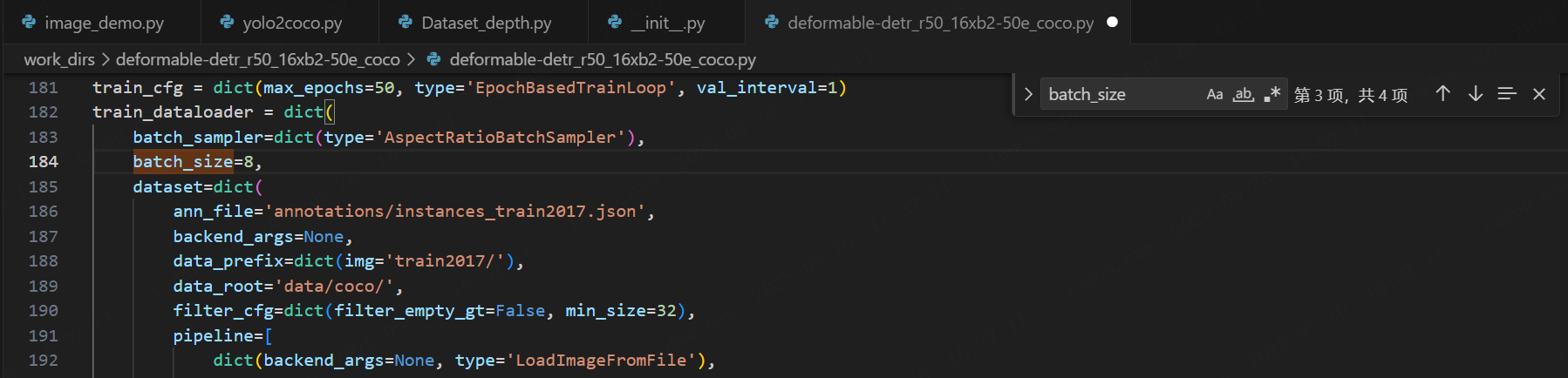
(3)修改batch_size
ctrl+F召喚出搜索框,輸入batch_size,根據顯卡算力設置train_dataloader,test_dataloader和val_dataloader的批量大小:
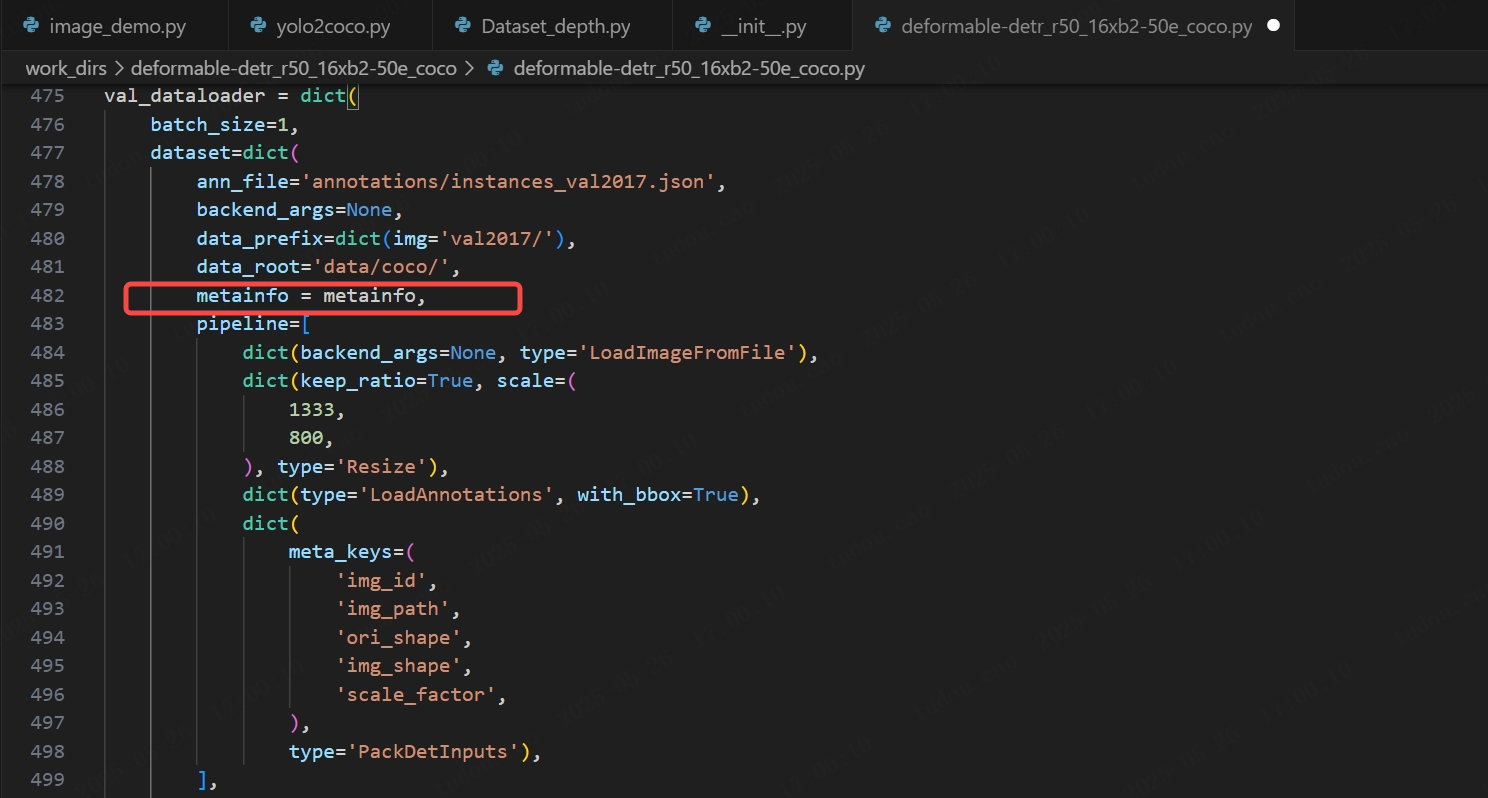
(4)注冊數據集的metainfo
參考第一步,在配置文件中注冊以下信息:
metainfo = dict(classes=('shallow_box', 'shallow_half_box'),palette=[(220, 20, 60), (119, 11, 32)]
)然后在train_dataloader,test_dataloader,val_dataloader中都寫入:
(5)修改訓練輪數:ctrl+F召喚出搜索框,輸入max_epochs,這個模型默認的訓練輪數是50

5.訓練
然后把3中的命令改為修改后的配置文件路徑:
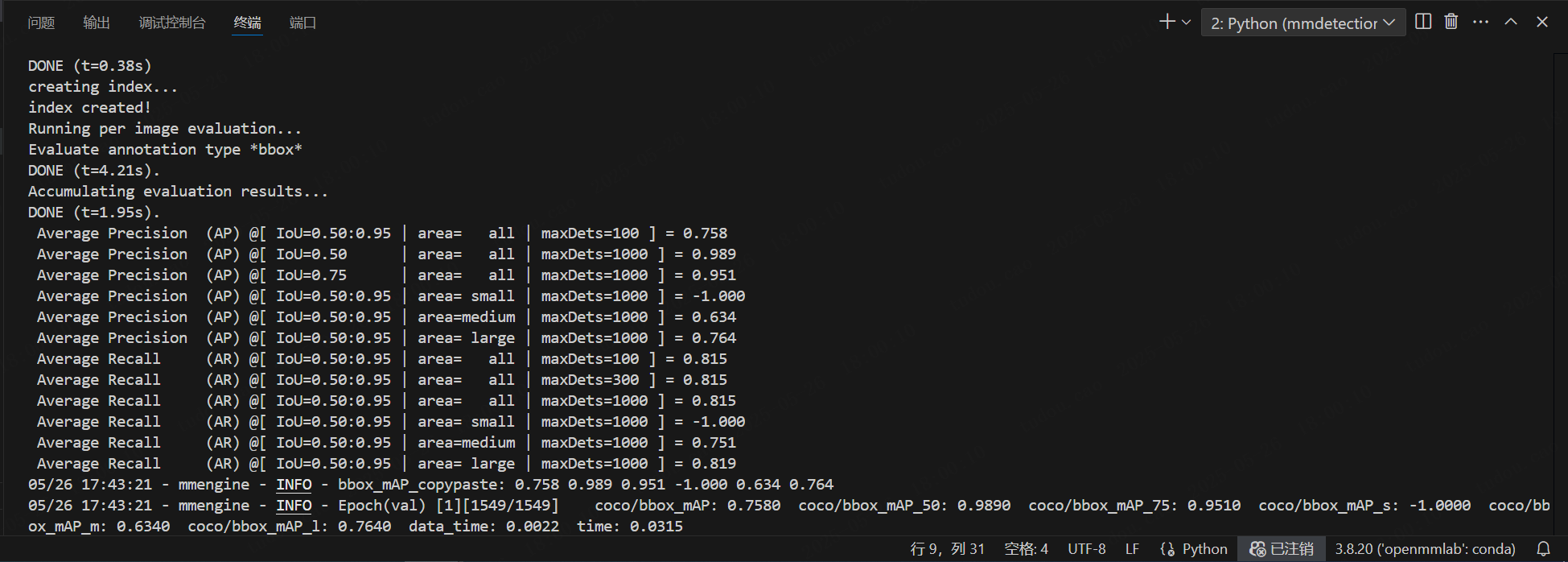
python tools/train.py <你所修改的模型配置文件路徑>python tools/train.py work_dirs/deformable-detr_r50_16xb2-50e_coco/deformable-detr_r50_16xb2-50e_coco.py看到以下界面說明正常運行:
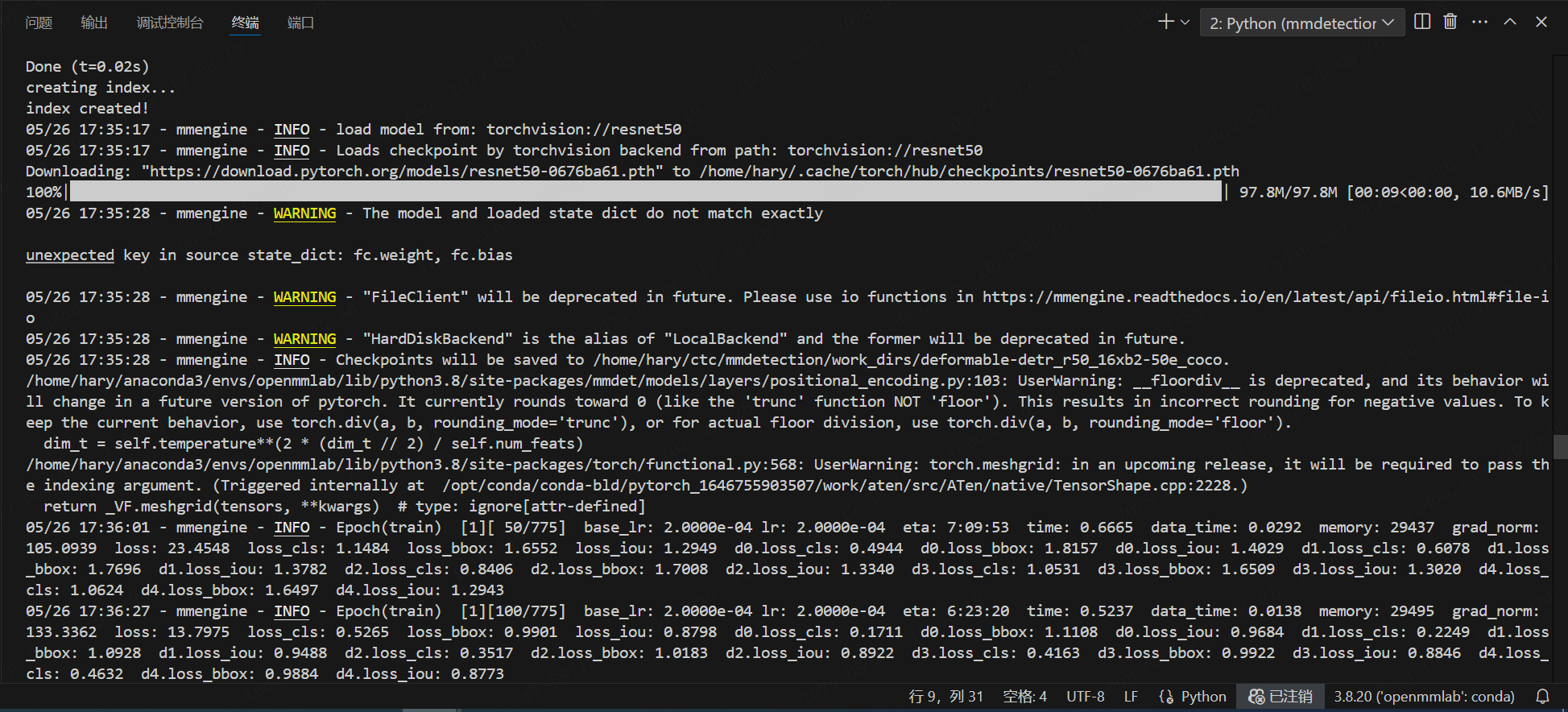
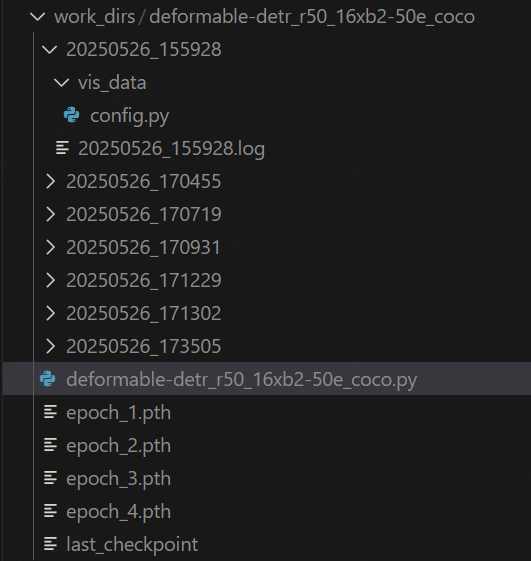
這個時候模型也會自動保存每一輪的權重文件:

醫學圖像的配準全過程文檔及程序)
基礎使用)

中播放)
)








的路徑規劃(附ROS C++/Python仿真))




