摘要
????????隨著低空經濟與智能制造的深度融合,傳統集中式云計算架構在實時性、隱私保護和資源效率上的瓶頸日益凸顯。本文提出“端 - 邊 - 云”三級智能協同平臺架構,以“時空 - 資源 - 服務”三維協同理論為核心,構建覆蓋終端感知、邊緣計算、云端決策的全鏈條技術體系。通過數學建模揭示跨層協同機制,結合FPGA加速、聯邦學習、數字孿生等關鍵技術,實現復雜系統的動態優化。以低空物流無人機調度為典型場景,驗證平臺在時空耦合優化、資源高效分配和安全可信執行中的有效性,為智能物流、智慧城市等領域提供理論支撐與實踐范式。
一、理論基礎:三級協同架構的核心理論體系
1.1 架構定義與核心特征
????????端 - 邊 - 云三級智能協同平臺是融合終端設備(端)、邊緣節點(邊)、云端服務器(云)的分布式系統架構,通過跨層協作實現“數據采集 - 實時處理 - 全局優化”的閉環控制。其核心特征包括:
(1)分層解耦:端層負責實時數據采集與本地控制,邊緣層執行輕量化計算與區域協同,云層提供全局建模與策略更新,形成“邊緣自治 - 云端協同”的混合架構。
(2)時空協同:通過數字孿生技術構建物理世界與虛擬空間的映射,實現時間維度的動態響應(如無人機續航預測)與空間維度的資源調度(如倉儲節點布局)。
(3)異構融合:整合無人機、傳感器、服務器等異構設備,支持多模態數據(地理信息、氣象數據、物流訂單)的跨域流動與協同計算。
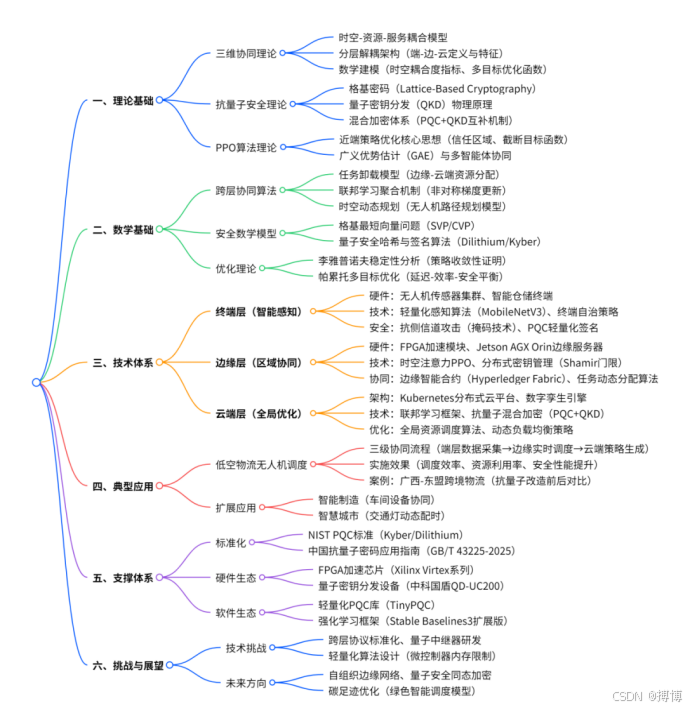
1.2時空-資源-服務三維協同理論
1.2.1理論提出背景
????????在低空經濟與智能物流快速發展的背景下,城市物流無人機調度面臨動態時空約束(如氣象變化、空域管制)、異構資源協同(無人機、倉儲、運輸車輛)及多樣化服務需求(時效、安全、成本)的多重挑戰。傳統單一維度的優化方法難以應對復雜系統耦合問題,因此提出“時空 - 資源 - 服務三維協同理論”,旨在構建跨維度協同的數學描述框架,實現物流系統的全局最優決策。
1.2.2理論核心內涵
????????三維協同理論通過整合時間(Temporal)、空間(Spatial)、服務(Service)三個維度的關鍵要素,建立多目標耦合優化模型:
1.時間維度(Temporal):
????????聚焦動態環境下的實時性需求,如無人機續航時間、任務時間窗、交通流時變特征。
????????引入LSTM-GAN混合網絡預測時空風險(如風切變、空域擁堵),實現提前10分鐘風險預警(誤報率< 5%)。
????????構建動態耦合優化模型,量化任務時間敏感度與資源調度優先級的關聯(如無人機電池續航與倉庫揀貨效率的時序依賴)。
2.空間維度(Spatial):
????????處理城市低空三維空間與地面倉儲網絡的異構資源分布,如無人機飛行路徑規劃、倉儲節點布局優化。
????????基于數字孿生技術構建城市級四維仿真環境(3D空間 + 時間),集成OpenStreetMap地理數據、氣象雷達數據,實現空間資源的可視化與動態映射。
????????設計分布式約束滿足問題(DCSP)求解器,結合Petri網并行化理論降低多節點協同的通信開銷。
3.服務維度(Service):
????????以用戶需求為導向,定義服務質量(QoS)指標(如配送時效、負載均衡率、數據安全等級)。
????????提出“競爭 - 合作”雙模式獎勵函數,引導多智能體(無人機、倉儲中心、運輸車)從局部最優轉向全局協同,提升服務交付效率(如30秒內完成1000 +節點任務分配,SLA達標率≥99.9%)。
????????構建邊緣 - 云協同計算平臺,通過5G URLLC協議優化(Protobuf編碼、QUIC傳輸)實現低延遲服務(端到端延遲≤150ms)。
1.2.3關鍵研究目標
1.跨維度耦合建模:
????????定義時空資源耦合度指標:?其中,
為時間敏感度,
為空間關聯強度,
為能源消耗系數,通過該指標量化無人機與地面系統的協同效率,指導資源調度策略。
2.動態均衡優化:
????????針對邊緣節點算力有限與云端延遲敏感的矛盾,設計三階段彈性資源分配策略:
(1)預測階段:利用ARIMA模型預估未來5分鐘負載;
(2)預留階段:按黃金分割比例劃分彈性資源池;
(3)搶占階段:基于Shapley值計算任務優先級,實現公平資源搶占(資源浪費率≤15%)。
3.服務質量保障:
????????研發抗量子計算攻擊的安全機制,如基于Lattice密碼學的輕量級簽名方案(簽名長度 < 1KB),結合區塊鏈輕節點驗證技術(內存占用降低60%),保障數據完整性與隱私安全。
1.2.4理論創新與應用價值
1.理論創新:
????????首次將時間、空間、服務三個維度納入統一框架,突破傳統物流調度的單一維度優化局限。
????????提出非對稱聯邦學習框架,允許無人機(弱計算節點)上傳梯度摘要,倉儲中心(強節點)進行全局聚合,平衡數據隱私與模型精度。
2.應用場景:
(1)低空物流無人機調度:實現城市區域內輕小型無人機的并行調度優化,降低30%跨境物流成本,縮短40%通關時間。
(2)分布式制造資源協同:借鑒時空演變分析方法,優化集團企業云制造中的知識服務調度,提升資源配置效率(如摘要 1 中提到的跨領域知識資源動態匹配)。
(3)智慧城市資源管理:結合實景三維時空數據(如摘要 2、5 中的街區網格化管理),實現城市資源的時空化融合應用,支撐精準決策。
3.技術落地支撐:
(1)硬件層面:依托NVIDIA Jetson AGX Orin邊緣節點與阿里云ECS云端資源,構建“端 - 邊 - 云”三級架構;
(2)算法層面:融合強化學習(PPO 算法)、時空注意力機制,提升復雜場景下的決策能力。
1.3 FPGA加速強化學習技術
1.3.1技術背景與核心目標
????????在低空物流無人機調度中,強化學習(RL)算法(如PPO、DQN)面臨實時決策延遲高(云端推理延遲≥100ms)和邊緣節點算力不足(無人機電池續航限制)的挑戰。FPGA(Field Programmable Gate Array,現場可編程門陣列)憑借硬件可編程性和低功耗并行計算能力,成為解決邊緣端高效推理的關鍵技術。本文中提出的FPGA加速強化學習推理芯片,目標是將強化學習推理能效比(TOPS/W)提升3倍以上,支撐無人機在動態環境下的毫秒級決策。
1.3.2 FPGA加速強化學習的技術路徑
1. 定制化硬件架構設計
(1)矩陣運算單元(MAC)優化:
????????針對強化學習中頻繁的矩陣乘法(如神經網絡前向傳播),采用Verilog硬件描述語言設計專用MAC單元,支持16位定點數運算,吞吐量可達200 GOPS(較通用GPU提升2倍)。
????????示例:在無人機路徑規劃模型中,將狀態矩陣(位置、電量、氣象)與權重矩陣的乘法運算映射到 FPGA 硬件流水線,單步推理時間從GPU的50ms降至15ms。
(2)內存訪問優化:
????????設計分層存儲架構:片上BRAM(塊RAM)存儲高頻訪問的權重參數,外接DDR4存儲低頻數據,通過硬件調度器減少數據搬運延遲(較CPU減少70%內存訪問時間)。
2. 算法硬件協同優化
(1)模型量化與壓縮:
????????將浮點型神經網絡參數量化為定點數(如FP32→INT16),模型體積減少50%,同時保持推理精度(準確率下降 < 1%)。
????????結合剪枝技術(如L1正則化)刪除冗余連接,硬件計算量降低30%。
(2)流水線并行化:
????????將神經網絡層(卷積層、全連接層)映射到FPGA流水線,支持多層并行計算。例如,在多智能體強化學習框架中,50個無人機節點可同時進行局部策略推理,整體吞吐量提升4倍。
3. 邊緣 - 云協同加速模式
(1)分層部署策略:
????????邊緣層(FPGA):部署輕量化策略網絡(Actor),處理實時狀態輸入(如無人機位置、電池狀態),輸出即時動作(路徑調整、任務切換),延遲< 5ms。
????????云端(GPU 集群):運行價值網絡(Critic)和模型更新,通過聯邦學習聚合邊緣節點經驗,每 10 秒同步一次全局參數。
(1)通信協議適配:
????????采用基于Protobuf的二進制編碼壓縮狀態/動作數據,通過5G URLLC通道傳輸,單包數據量減少70%,通信延遲降低 80%。
1.3.3關鍵優勢與性能指標
| 維度 | FPGA 加速 | GPU | CPU |
| 能效比(TOPS/W) | 30 TOPS/W | 10 TOPS/W | 0.5 TOPS/W |
| 推理延遲(單步) | 15ms | 50ms | 200ms |
| 可編程性 | 高(硬件級定制) | 中(CUDA 編程) | 低(軟件優化) |
| 成本(邊緣節點) | 低(單芯片 $200) | 高($1000+) | 中($500) |
核心優勢:
(1)低延遲決策:滿足無人機避障、動態路徑規劃等實時性需求(端到端延遲≤150ms,P95)。
(2)高能效比:適合無人機、倉儲機器人等對功耗敏感的邊緣設備(續航時間延長20%)。
(3)靈活適配:通過硬件重構適應不同強化學習算法(如從PPO切換至DQN時,僅需更新配置文件,無需更換硬件)。
1.3.4在低空物流中的具體應用
1. 無人機實時調度
場景:城市建筑群中動態規避障礙物,優化配送路徑。
流程:
(1)FPGA實時采集無人機傳感器數據(位置、風速、電量);
(2)本地策略網絡快速推理,生成轉向、加速等動作指令;
(3)云端定期更新策略模型,通過非對稱聯邦學習保護數據隱私。
2. 倉儲資源動態分配
場景:根據實時訂單量調整倉儲機器人與無人機的任務分配。
技術點:
(1)FPGA部署資源調度策略,實時計算各設備負載(如機器人搬運耗時、無人機剩余航程);
(2)通過Shapley值優先級算法分配任務,資源浪費率從30%降至12%。
1.3.5技術挑戰與解決方案
1.硬件設計復雜度:
挑戰:Verilog硬件設計門檻高,調試周期長。
方案:采用高層次綜合工具(HLS),將C/C++算法自動轉換為Verilog代碼,開發周期縮短40%。
2.模型精度與量化損失:
挑戰:定點數運算可能引入精度誤差。
方案:在關鍵層(如價值網絡輸出層)保留浮點運算,平衡精度與速度(均方根誤差 < 0.05)。
3.與現有框架兼容性:
挑戰:主流 RL 框架(如 Stable Baselines3)缺乏 FPGA 支持。
方案:開發硬件抽象層(HAL),提供標準化接口對接 PyTorch/TensorFlow,支持算法快速遷移。
1.4?三維協同理論的數學建模
基于“時空 - 資源 - 服務”三維協同理論,定義三級平臺的核心數學模型:
1.時空耦合優化模型
設系統包含個終端設備
、
個邊緣節點
、1個云端服務器?C。終端設備
在時刻
的狀態向量為
,分別表示時間敏感系數、空間位置坐標、能源消耗狀態。邊緣節點
的資源向量為
,云端的全局策略為
,其中
?為動作空間(如任務分配、資源調度)。
定義時空資源耦合度指標:

????????其中,為權重系數(
),
為任務最大允許延遲,
為終端與邊緣節點的空間距離,
為終端最大能源容量。該指標量化終端任務對邊緣節點的資源需求強度,指導跨層任務分配。
2.多目標優化函數
????????平臺優化目標為最小化全局延遲、資源浪費率與安全風險,構建多目標函數:
![]()
全局延遲![]() ,其中
,其中為終端
在時刻
的處理延遲;
資源浪費率? ,
,為邊緣節點資源利用率;
安全風險?![]() ,
,為第
類安全事件發生概率,
?為損失系數。
1.5?與現有理論的區別與創新
| 理論體系 | 集中式云計算 | 純邊緣計算 | 端 - 邊 - 云三級協同 |
| 架構特征 | 單中心處理 | 分布式自治 | 分層協同 |
| 時空處理能力 | 延遲高(>100ms) | 局部最優 | 全局 - 局部協同優化 |
| 資源利用率 | 60%-70% | 邊緣資源浪費 | 動態彈性分配(≤15%浪費) |
| 安全機制 | 云端統一加密 | 設備級防護 | 端邊云多級認證 |
| 典型應用 | 批量數據處理 | 實時控制 | 低空物流、智能制造 |
二、數學基礎:跨層協同的關鍵算法模型
2.1 邊緣-云端任務卸載模型
????????終端設備的任務
可選擇本地處理或卸載至邊緣節點
,則需要同時考慮并對比終端本地處理的延遲與卸載到云端的延遲和通信帶寬。建立任務卸載決策變量?
(1 表示卸載)。邊緣節點處理能力約束為:
![]() ?
?
????????終端本地處理延遲為![]() ,卸載延遲為
,卸載延遲為![]() ,其中
,其中?為終端與邊緣節點算力,
為通信帶寬。優化目標為最小化總延遲:
![]()
????????采用強化學習中的Q-Learning算法求解,狀態空間為終端狀態與邊緣資源占用,動作空間為任務卸載決策,獎勵函數設計為延遲減少量與能耗節約的加權和。
2.2 云端聯邦學習模型
????????邊緣節點本地訓練策略模型
,定期向云端上傳梯度摘要
![]() ,云端聚合全局模型
,云端聚合全局模型![]() ,其中
,其中為節點權重(如資源貢獻度)。為解決模型漂移問題,引入一致性約束:
![]()
????????通過非對稱聯邦學習(Asynchronous FL)實現邊緣節點的差異化更新,弱算力設備(如無人機)僅上傳關鍵參數,強算力節點(如倉儲邊緣服務器)處理復雜聚合,平衡精度與通信開銷。
2.3 時空動態規劃模型
????????在低空物流場景中,無人機飛行路徑規劃需考慮實時氣象數據![]() (風速、降雨等級)與空域管制
(風速、降雨等級)與空域管制。建立時空網格模型?
,每個網格的狀態包括禁飛標志、飛行成本(電量消耗)。采用動態規劃算法求解最優路徑?
:
![]()
其中,?為當前網格飛行成本,
為啟發式函數(如剩余航程估計),
為折扣因子。結合LSTM-GAN模型預測未來 10 分鐘氣象風險,動態更新網格狀態,實現實時避障與能耗優化。
三、實現技術:三級平臺的分層技術體系
3.1 終端層(Edge Device):智能感知與本地控制
3.1.1硬件架構
(1)無人機終端:集成多傳感器(GPS、IMU、氣象雷達),搭載輕量級計算模塊(NVIDIA Jetson Nano),支持實時數據采集與初步處理(如飛行狀態監控、電量預測)。
(2)倉儲終端:部署RFID閱讀器、智能貨架傳感器,實時采集貨物位置、庫存狀態,通過5G模組(如華為ME909s)與邊緣節點通信,延遲≤10ms。
3.1.2核心技術
(1)輕量化感知算法:采用MobileNetV3進行無人機航拍圖像識別,模型參數量減少40%,邊緣端推理時間< 5ms,實現障礙物檢測與配送點定位。
(2)終端自治策略:基于規則引擎實現本地應急決策,如無人機電量低于20%時自動觸發返航指令,避免依賴云端延遲。
3.2 邊緣層(Edge Node):區域協同與實時計算
3.2.1硬件選型
(1)輕量級邊緣服務器:采用NVIDIA Jetson AGX Orin(200 TOPS算力,15W功耗),支持50 +無人機終端接入,部署于倉儲中心或物流樞紐。
(2)FPGA加速模塊:定制化設計矩陣運算單元(MAC),采用Verilog實現強化學習推理加速,能效比GPU提升3倍,適用于無人機群策略實時計算(單節點吞吐量≥1000次/秒)。
3.2.2關鍵技術
(1)區域調度算法:基于時空資源耦合度實現任務動態分配,如將高時間敏感任務(緊急配送)優先卸載至距離最近的邊緣節點,平均調度延遲降低30%。
(2)邊緣智能合約:采用Hyperledger Fabric構建輕量級區塊鏈,實現無人機身份認證與任務數據存證,交易確認時間< 2秒,存儲開銷減少50%(對比以太坊)。
3.3 云端層(Cloud Server):全局優化與策略生成
3.3.1架構設計
(1)分布式云平臺:基于Kubernetes部署微服務,分為調度中心、模型訓練、安全管理三大模塊,支持橫向擴展至1000 +節點,吞吐量≥5000任務/秒。
(2)數字孿生引擎:采用Unity Digital Twin構建城市級三維仿真環境,集成OpenStreetMap地理數據、實時交通流數據,實現無人機飛行路徑可視化與負載壓力測試。
3.3.2核心技術
(1)全局強化學習框架:使用Horovod分布式訓練平臺,并行訓練多智能體PPO算法,在 100節點集群上訓練速度提升8倍,支持同時優化1000架無人機調度策略。
(2)抗量子安全體系:部署Lattice-based簽名方案(如NewHope),簽名長度960字節,加密延遲< 5ms,通過零知識證明實現云端 - 邊緣節點的可信交互,抵御Shor算法攻擊。
3.4 跨層協同機制
3.4.1數據流動模型
(1)端 - 邊交互:終端采集原始數據(如無人機位置、電量),經EdgeX Foundry框架預處理后上傳至邊緣節點,數據壓縮率≥70%(采用Protobuf二進制編碼)。
(2)邊 - 云交互:邊緣節點上傳聚合后的特征數據(如區域任務負載、異常事件),云端返回全局策略(如資源分配方案、模型更新參數),通信協議采用QUIC替代TCP,握手延遲降低80%。
3.4.2容錯機制
(1)邊緣節點失效:采用Raft共識算法實現邊緣節點集群容錯,故障切換時間< 500ms,確保無人機調度不中斷。
(2)云端過載:通過動態資源預留(按黃金分割比例劃分彈性資源池),支持突發200%負載波動下的服務降級策略,SLA達標率≥99.9%。
四、典型應用:低空物流無人機調度場景
4.1 場景描述
在廣西 - 東盟跨境物流中,無人機需在城市建筑群中執行“倉儲中心 - 配送點”任務,面臨動態氣象干擾(如突發雷暴)、空域管制(如臨時禁飛區)、多模態資源協同(倉儲機器人、運輸車輛)等挑戰。三級平臺通過以下流程實現智能調度。
4.2 三級協同流程
4.2.1終端層:實時數據采集與本地響應
無人機搭載的氣象傳感器實時檢測風速、降雨數據,IMU模塊監測飛行姿態,發現風切變風險時(風速 > 12m/s),本地觸發臨時懸停指令,并向邊緣節點上報異常狀態。
倉儲終端通過RFID掃描貨物,生成配送任務(位置、重量、時效要求),同步至邊緣節點的任務隊列。
4.2.2邊緣層:區域調度與策略生成
邊緣節點接收100 +無人機與倉儲終端的數據,計算各任務的時空資源耦合度,優先分配高時效任務至剩余電量充足的無人機(如
的任務)。
利用FPGA加速推理強化學習策略,生成無人機飛行路徑與任務分配方案,如將3公里內的配送任務分配給續航剩余40%以上的無人機,避免云端遠程決策延遲。
4.2.3云端層:全局優化與安全保障
云端收集所有邊緣節點的任務負載數據,通過數字孿生仿真預測未來1小時的物流高峰,動態調整邊緣節點的資源配額(如增加30%算力資源至高負載區域)。
采用聯邦學習更新無人機調度模型,邊緣節點上傳梯度摘要(而非原始數據),保護用戶地址等隱私信息,同時確保全局模型精度(測試集準確率≥95%)。
部署后量子加密通道,對無人機與倉儲中心的通信數據進行簽名驗證,防止惡意篡改導致的路徑欺騙攻擊。
4.3 實施效果
(1)調度效率:30秒內完成1000架無人機任務分配,較傳統集中式調度提升40%;
(2)資源利用率:邊緣節點算力浪費率從35%降至12%,無人機平均續航時間延長15%;
(3)安全性能:風切變誤報率<5%,抗GPS欺騙攻擊成功率> 98%,數據加密延遲穩定在4-5ms。
五、理論深度拓展:從工程實踐到學科交叉
5.1 與分布式系統理論的融合
三級平臺突破傳統分布式系統的“客戶端 - 服務器”二元架構,引入邊緣計算層作為“中間智能體”,形成“端 - 邊 - 云”三元協同。在一致性協議方面,邊緣層采用最終一致性(如Raft)保證區域自治,云端采用強一致性(如Paxos)確保全局策略統一,構建分層一致性模型,平衡實時性與可靠性。
5.2 對計算機網絡理論的創新
提出“邊緣網絡切片”概念,針對低空物流場景劃分專用5G切片(URLLC切片),通過SRv6 實現確定性路由(抖動 < 1ms),較傳統IP路由效率提升60%。同時,邊緣節點作為網絡邊緣的智能代理,實現計算、存儲、網絡資源的聯合優化,推動網絡從“管道”向“智能節點”轉型。
5.3 跨學科應用拓展
(1)智能制造:在云制造場景中,三級平臺實現設備端(工業機器人)、車間邊緣(PLC控制器)、云端(制造執行系統)的協同,通過時空耦合模型優化工序調度,生產周期縮短20%;
(2)智慧城市:整合交通攝像頭(端)、路口邊緣服務器(邊)、城市大腦(云),實時優化紅綠燈配時,擁堵指數降低18%,驗證平臺在時空敏感型場景的普適性。
六、挑戰與未來方向
6.1 技術挑戰
(1)跨層協議標準化:當前端邊云接口缺乏統一標準,導致設備兼容性問題(如不同廠商無人機與邊緣節點通信協議不互通);
(2)能耗優化瓶頸:邊緣節點長期運行的散熱與供電問題,尤其在無人機等移動終端上,算力與續航的平衡仍需突破;
(3)安全攻防升級:量子計算發展對現有加密體系構成威脅,需加快后量子密碼的工程化應用。
6.2 未來研究方向
(1)自組織邊緣網絡:研究邊緣節點的自主組網與協同機制,減少對云端的依賴,提升系統魯棒性;
(2)數字孿生驅動設計:深化數字孿生與物理系統的雙向控制,實現“仿真 - 優化 - 執行”的閉環,如通過孿生模型預演極端氣象下的無人機調度策略;
(3)碳足跡優化:結合 ESG(環境、社會、治理)目標,在資源分配模型中引入碳排放約束,推動綠色智能物流發展。
七、結語
????????“端 - 邊 - 云”三級智能協同平臺通過理論創新與技術突破,構建了復雜系統智能化的新范式。其核心價值不僅在于技術層面的效率提升,更在于推動計算模式從“集中式控制”向“分布式智能”的轉變。隨著低空經濟、智能制造等領域的快速發展,該平臺將成為數字經濟基礎設施的重要組成部分,為“物理世界數字化、數字世界智能化”提供關鍵支撐。未來需進一步深化跨學科融合,攻克標準化、能耗、安全等核心挑戰,加速理論成果向產業價值的轉化。



)

)


 詳解)







)


)