過去的5個月,香港大學 MaRS 實驗室陸續開源了四套面向無人機的在線 SLAM 框架:**FAST-LIVO2 、Point-LIO(grid-map 分支) 、Voxel-SLAM 、Swarm-LIO2 **。這四套框架覆蓋了單機三傳感器融合、高帶寬高速機動、長時間多級地圖優化以及去中心化集群協同等核心應用場景,幾乎囊括當下無人機自主導航的主要需求。
本文將介紹每套 SLAM 算法的核心內容與技術亮點,幫助您選擇適配的方案并快速上手。文末還附有論文與代碼鏈接,方便您一鍵直達。
01 FAST-LIVO2
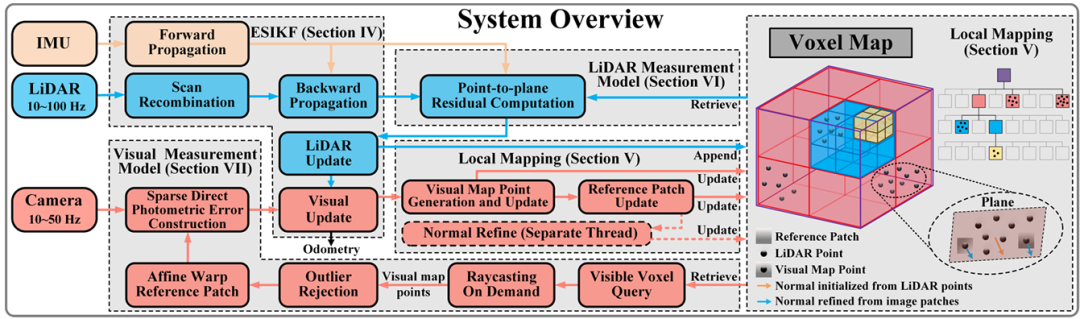
FAST-LIVO2 是一種融合激光雷達(LiDAR)、慣性測量單元IMU和視覺信息的高效定位與建圖系統,核心采用誤差狀態迭代卡爾曼濾波器(ESIKF)與順序更新策略,實現精確狀態估計。不同于傳統方法,FAST-LIVO2 避免特征提取,直接處理原始 LiDAR 和圖像數據,提升了計算效率與系統魯棒性。
圖片來源:《FAST-LIVO2: Fast, Direct LiDAR-Inertial-Visual Odometry》, IEEE T-RO,2024.
技術亮點
-
直接法融合策略,拋棄繁瑣特征提取LiDAR模塊直接對原始點云進行配準,無需提取邊緣或平面特征。視覺模塊通過最小化光度誤差進行圖像對齊,避免了傳統的特征點提取過程。
-
統一體素地圖,幾何與紋理深度協同
系統采用統一的體素地圖結構,LiDAR構建幾何結構,圖像patch附著于LiDAR平面形成“視覺地圖點”,實現稠密彩色地圖構建。該策略不僅優化了數據結構,也保障了多源信息的一致性融合。 -
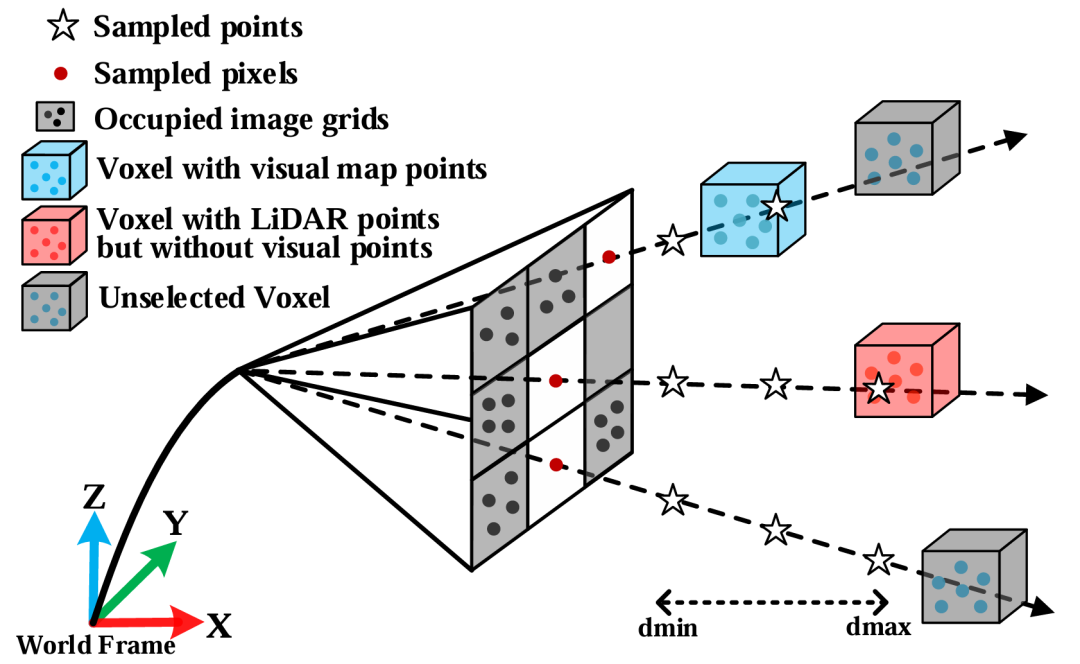
圖像對齊與魯棒性增強通過最小化光度誤差進行稀疏圖像對齊,動態更新參考圖像patch;在LiDAR盲區或FoV不足時,按需射線投影補齊盲區;實時估算曝光時間,適應劇烈光照變化;FAST-LIVO2 同時提升了圖像對齊精度與在光照驟變或點云缺失場景下的魯棒性。

圖片來源:《FAST-LIVO2: Fast, Direct LiDAR-Inertial-Visual Odometry》, IEEE T-RO,2024.
圖片來源:《FAST-LIVO2: Fast, Direct LiDAR-Inertial-Visual Odometry》, IEEE T-RO,2024.
- ESIKF慣序更新,系統收斂更快更穩采用誤差狀態迭代卡爾曼濾波器(ESIKF),對 LiDAR 與圖像依次更新狀態,解決了多源觀測維度不一致的問題,極大提高融合精度與實時性。

圖片來源:《FAST-LIVO2: Fast, Direct LiDAR-Inertial-Visual Odometry》, IEEE T-RO,2024.
- 優化資源利用
為了適配資源受限的嵌入式平臺,FAST-LIVO2 對系統架構與算法流程進行了深度優化。實測表明,FAST-LIVO2 能夠在 RK3588、Jetson Orin NX、RB5 等低功耗 ARM 平臺上穩定運行,單幀處理時延控制在 78 ms 以內,滿足實時導航與建圖的需求。
02 Swarm-LIO2
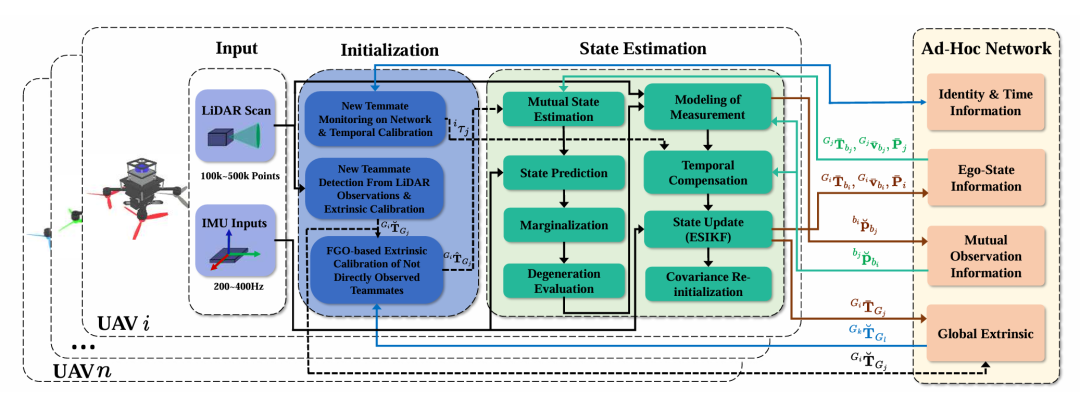
Swarm-LIO2 是港大 MaRS 實驗室4月最新開源的無人機集群 LiDAR-IMU 狀態估計框架,它通過去中心化 + 即插即用 + 超低帶寬 + 邊緣化加速,在 GPS 拒止、視野遮擋甚至 LiDAR 退化場景中,依舊為 40 架 UAV 提供厘米級本機與互相位姿,堪稱“無人機集群的 RTK”。
圖片來源:《Swarm-LIO2: Decentralized, Efficient LiDAR-Inertial Odometry for UAV Swarms》,IEEE T-RO,2025
技術亮點
-
全分布式,去中心化設計基于 Ad-Hoc 網絡搭建分布式通信框架,每架無人機自主廣播身份與狀態,無需中心節點協調,避免單點故障。
-
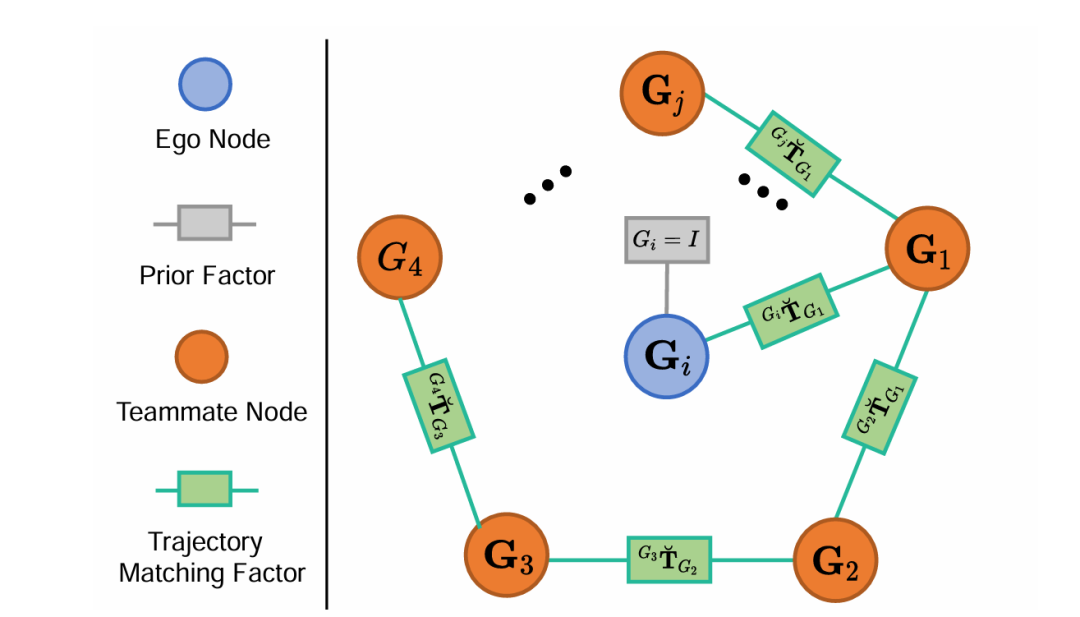
反光特征 + 因子圖快速初始化通過在機體貼反光條,每架無人機可在飛行中自動檢測新隊友,并通過軌跡匹配+因子圖優化完成時間延遲與全局外參的自動校準,支持大規模集群快速初始化。
圖片來源:《Swarm-LIO2: Decentralized, Efficient LiDAR-Inertial Odometry for UAV Swarms》,IEEE T-RO,2025
-
高效估計器:ESIKF + 邊緣化機制基于ESIKF融合 LiDAR、IMU 及互觀測量,提供高精度位姿估計。引入邊緣化策略,僅對當前可觀測的隊友外參進行估計,避免計算量隨集群規模增長,顯著提高擴展性。
-
時間補償機制針對不同無人機之間的傳感器異步問題,設計了精細的互觀測量時間補償模型,顯著提升互定位精度。
充分驗證
- 在仿真和真實環境中,Swarm-LIO2 實現了包括:室外避障編隊飛行、穿越密林任務、目標跟蹤與動態入隊/退隊、多UAV協同運輸、展示了在通信中斷、LiDAR退化等極端條件下仍能維持高魯棒性。
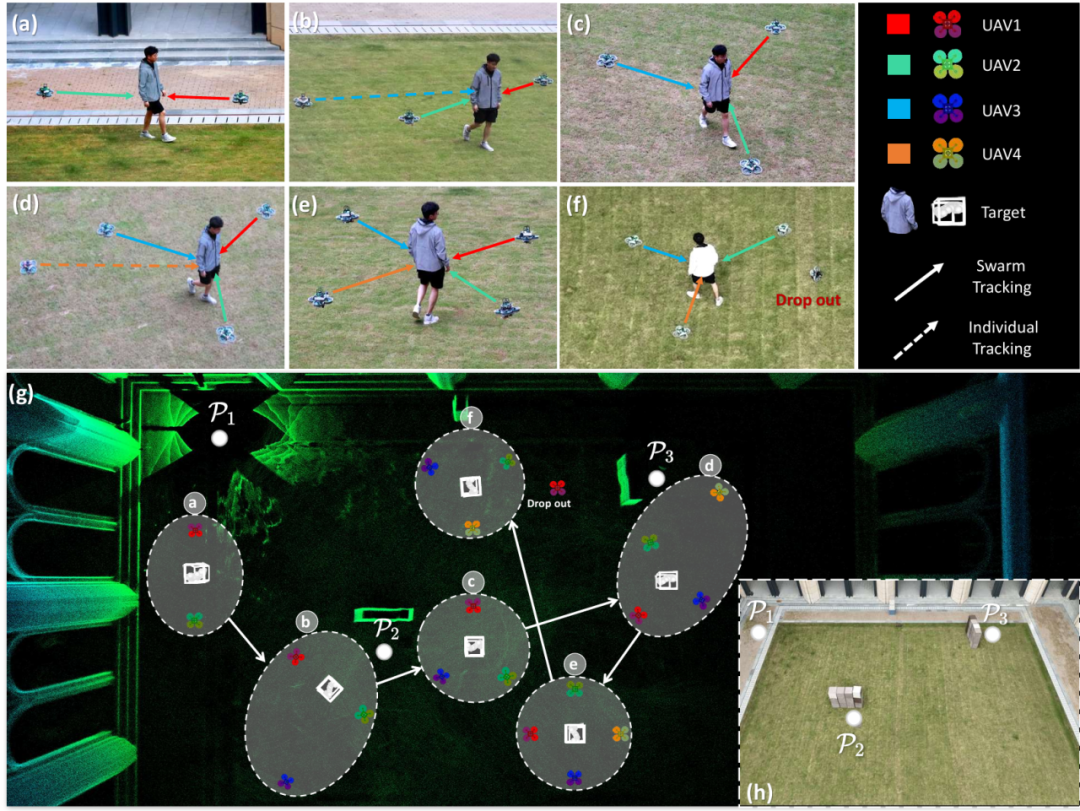
圖片來源:《Swarm-LIO2: Decentralized, Efficient LiDAR-Inertial Odometry for UAV Swarms》,IEEE T-RO,2025
03 Voxel-SLAM
Voxel-SLAM 是一個完整、準確且通用的 LiDAR-Inertial SLAM 系統,系統模塊包括:初始化、里程計估計、局部建圖、閉環檢測、全局建圖。其核心優勢在于:五大模塊統一使用自適應Voxel Map結構,并通過對短期、中期、長期、多圖關聯四類數據關聯的統一建模,實現從動態初始化到多次會話閉環的端到端高精度建圖。
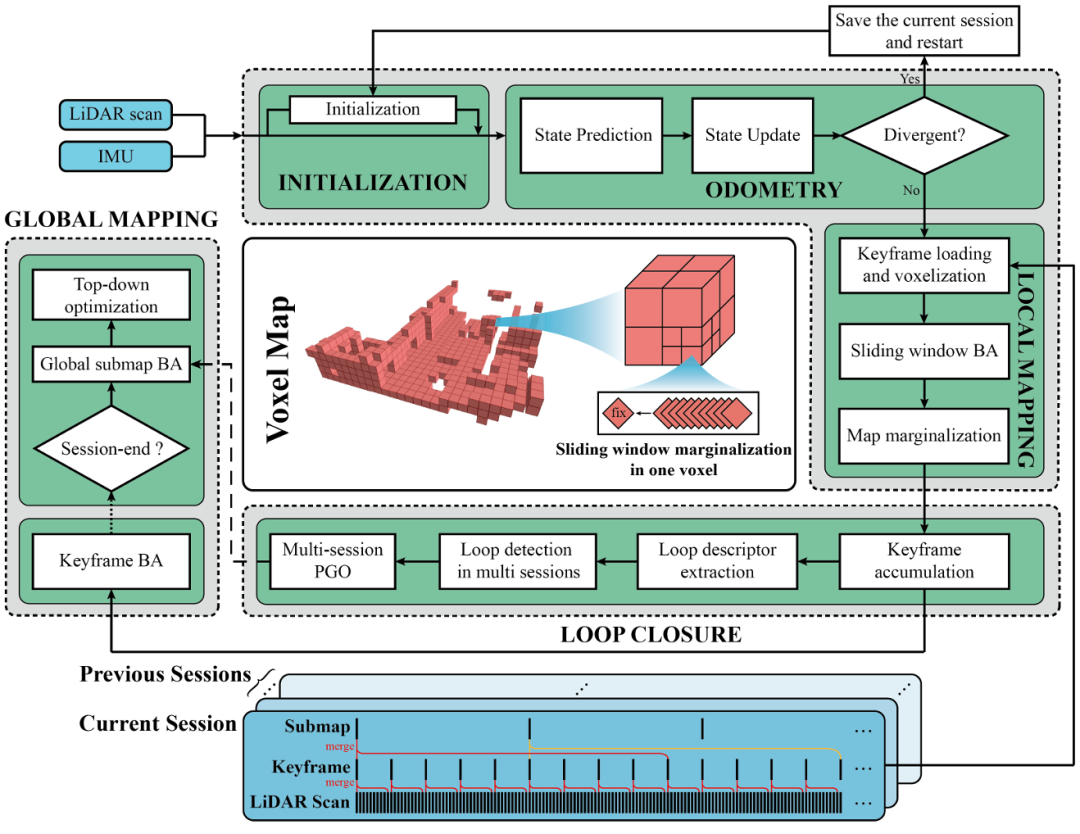
圖片來源:《Voxel-SLAM: A Complete, Accurate, and Versatile LiDAR-Inertial SLAM System》,arXiv:2410.08935,2024
技術亮點
-
統一的自適應體素地圖結構所有模塊均采用自適應體素地圖進行數據表達,實現各模塊的高效協同與快速數據關聯。
-
高效魯棒的初始化即使在非靜止初始狀態下,僅需約1秒數據即可完成系統的高精度初始化。
-
中期數據關聯的實時局部優化通過創新的LiDAR-慣性BA技術,實現實時優化狀態與地圖,顯著增強系統對快速運動和退化場景的適應能力。
-
多會話回環檢測與重定位支持當前與歷史會話之間的回環檢測,極大提高長期運行時的系統穩定性。
-
高效的全局一致性地圖優化引入層次化的全局優化方法,確保地圖精度與一致性,同時保證了高效的計算性能。
-
出色的魯棒性與泛化能力經測試表明,Voxel-SLAM在室內狹窄場景、城市大規模戶外環境及無人機高空作業場景中均展現了卓越的定位與建圖能力。
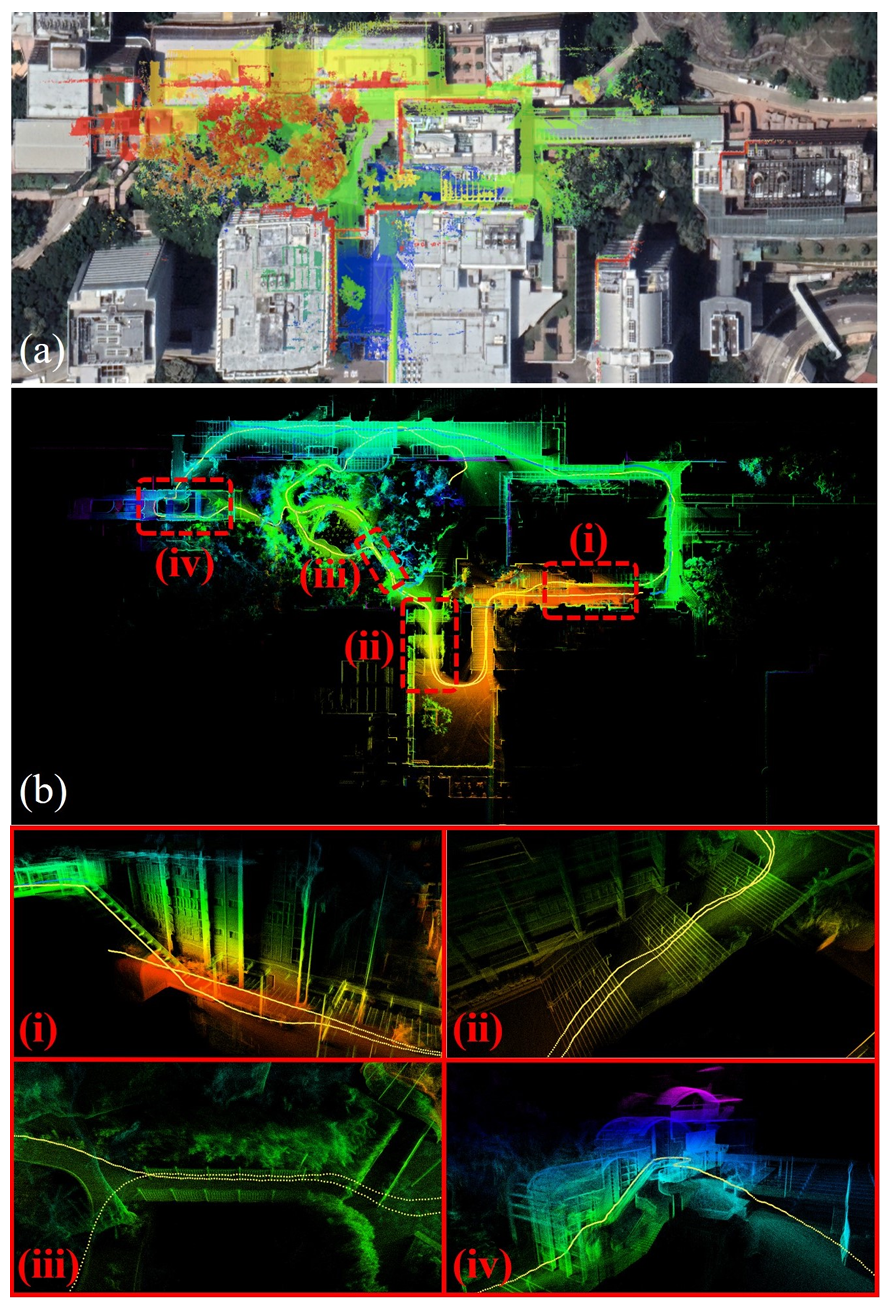
圖片來源:《Voxel-SLAM: A Complete, Accurate, and Versatile LiDAR-Inertial SLAM System》,arXiv:2410.08935,2024
04 Point-LIO(grid-map 分支)
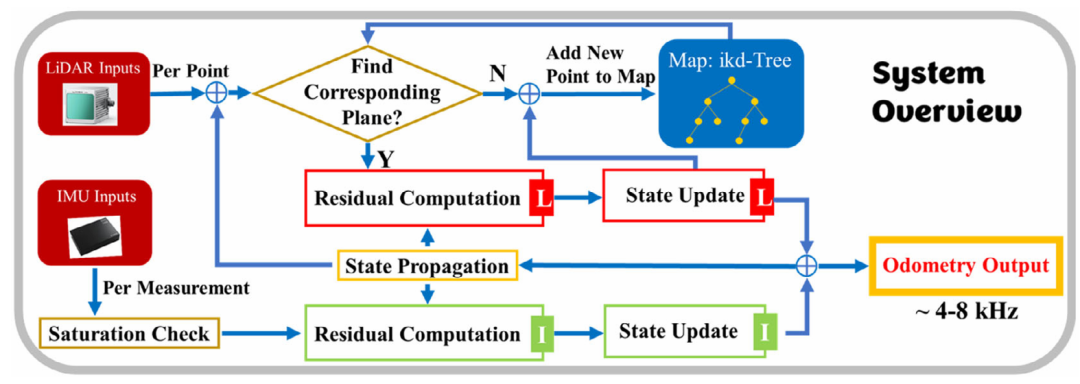
2025年2月港大在原 Point-LIO 框架中新增 point-lio-with-grid-map 分支,引入占據柵格重建與退化檢測,專為競速 UAV 的極限機動與高帶寬控制設計 。
圖片來源:《Point-LIO: Robust High-Bandwidth LiDAR-Inertial Odometry》,Advanced Intelligent Systems 2023
升級內容
-
新增柵格地圖構建與退化檢測邏輯。
-
持續 4–8 kHz 的里程計輸出,75 rad/s 角速度下仍無 IMU 飽和。
-
快速上手:與原 Point-LIO 完全兼容,建議搭配 200 Hz 以上 IMU 與硬同步 LiDAR,充分發揮高頻優勢。
05 如何選擇+上手要點?
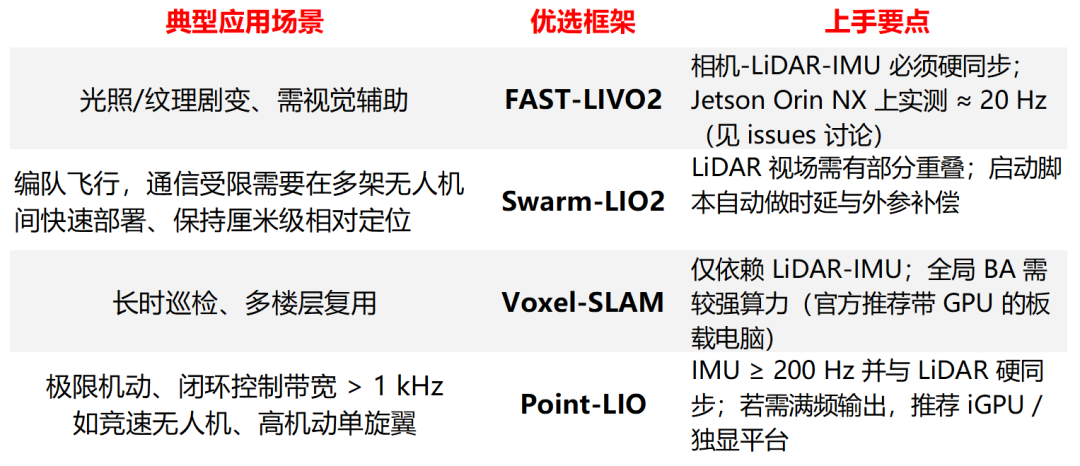
注意本文僅聚焦實時 SLAM / LIO / VIO;不含多會話地圖融合(LAMM)或稠密重建(GS-SDF、M2Mapping)等后端組件。
資源速遞
FAST-LIVO2:快速直接的激光-慣導-視覺里程計
FAST-LIVO2: Fast, Direct LiDAR-Inertial-Visual Odometry
論文鏈接:https://arxiv.org/pdf/2408.14035
FAST-LIVO2代碼開源:
https://github.com/hku-mars/FAST-LIVO2
硬同步設備開源:
https://github.com/xuankuzcr/LIV_handhold
相機和激光雷達標定開源:
https://github.com/hku-mars/FAST-Calib*
Swarm-LIO2:去中心化無人機集群激光-慣導里程計
Swarm-LIO2: Decentralized, Efficient LiDAR-Inertial Odometry for UAV Swarms
論文鏈接:https://arxiv.org/abs/2409.17798
開源代碼:https://github.com/hku-mars/Swarm-LIO2
Voxel-SLAM:完備、精確且多功能的激光-慣導 SLAM 系統
Voxel-SLAM: A Complete, Accurate, and Versatile LiDAR-Inertial SLAM System
論文鏈接:https://arxiv.org/abs/2410.08935
開源代碼:https://github.com/hku-mars/Voxel-SLAM
Point-LIO(grid-map 分支):高帶寬激光-慣導里程計
Point-LIO: Robust High-Bandwidth LiDAR-Inertial Odometry
論文鏈接:https://advanced.onlinelibrary.wiley.com/doi/full/10.1002/aisy.202200459
開源代碼:https://github.com/hku-mars/Point-LIO/tree/point-lio-with-grid-map
如果您有感興趣的技術話題,請在留言區告訴我們!關注阿木實驗室,更多技術干貨不斷更新!
開發遇到棘手難題可以上阿木官方論壇:bbs.amovlab.com
有工程師親自解答10000+無人機開發者和你共同進步!


)




)

結構體、共用體、枚舉、typedef關鍵字與位運算)


——visualize_dataset_html.py/visualize_dataset.py)





、包(Package)和模塊(Module)解析】)
