MS-Net: A Multi-Path Sparse Model for Motion Prediction in Multi-Scenes
基本信息
- 期刊:IEEE ROBOTICS AND AUTOMATION LETTERS (IF 4.6 SCI3區)
- 單位:同濟大學,上海人工智能實驗室
- 時間:2023年12月
- 數據集: ETH, UCY, and INTERACTION datasets
- 代碼:未開源
摘要
- 運動模式的多元和隨機性,導致預測任務非常具有挑戰性,但是又是自動駕駛非常重要的一環
- 深度學習在這個任務上表現出了巨大的潛力,但是
- 目前在多個駕駛場景(合流,環路,交叉路口)之間的聯系是什么,來設計一個網絡模型
- 目前,大多數是采用了一個統一的模型來建模多個場景,這可能不是最優的結果,針對單個場景來說。
- 為了解決這個問題,我們提出了多場景網絡(又名。MS-Net),這是一個由進化過程訓練的多路徑稀疏模型。
- MS-Net在推理階段選擇性地激活其參數的一個子集,從而為每個場景產生預測結果
- 在訓練階段,將不同場景下的運動預測任務抽象為一個多任務學習問題,設計了一種進化算法,在不同場景之間共享常識的同時,鼓勵網絡搜索每個場景的最優參數
- 我們的實驗結果表明,在大大減少參數的情況下,MS-Net在成熟的行人運動預測數據集上優于現有的最先進的方法,例如,ETH和UCY,并在互動挑戰中排名第二。
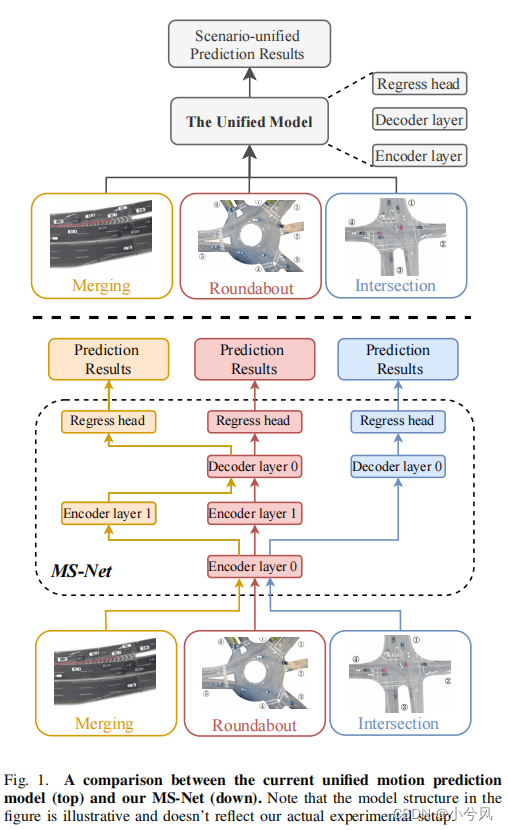
- 從上述圖片中可以看出,有公用的層 layer 0 作為常識,也有特色的層,針對單獨的場景。
Evolutionary Training Stage
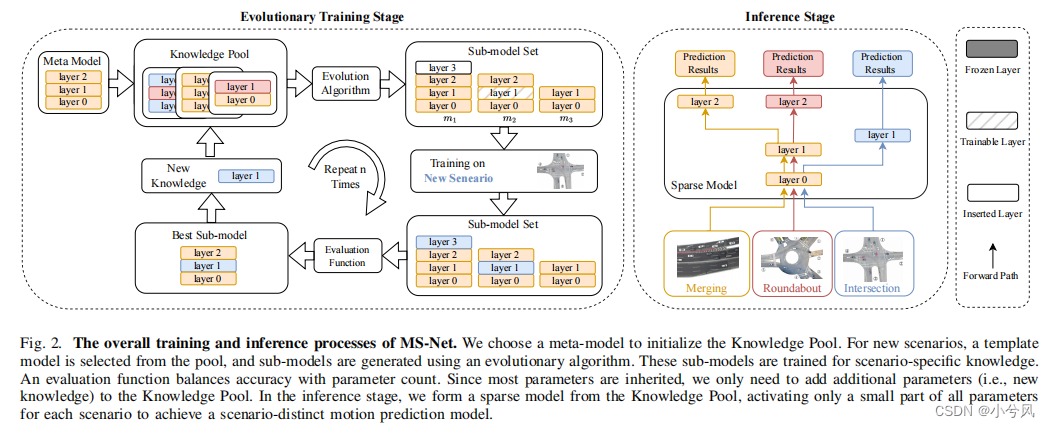
- 設計知識轉移和模型進化 有點意思 我還不懂 下次看
閱讀時間
2024年6月29日













四千字好文)





)