YOLO (You Only Look Once) 是一種高效的目標檢測算法,它以速度和精度著稱。YOLO 的工作原理是將目標檢測視為一個回歸問題,直接從圖像的像素空間預測目標的類別和位置。YOLO 目標檢測頭包括以下幾個關鍵部分:
-
輸入圖像處理:
- YOLO 接受大小固定的輸入圖像(如 416x416 或 608x608)。
- 輸入圖像會被分成一個 SxS 的網格(如 13x13, 19x19)。
-
特征提取器:
- 通常使用一個卷積神經網絡(如 Darknet)來提取圖像的特征。
- 特征提取器的輸出是一個特征圖,該特征圖的尺寸比輸入圖像小得多,但保留了圖像中的關鍵信息。
-
檢測頭:
- 檢測頭的輸入是特征提取器的輸出特征圖。
- 每個網格單元預測 B 個邊界框,每個邊界框由 5 個參數(x, y, w, h, confidence)和 C 個類別概率組成。
- x 和 y 是邊界框中心相對于網格單元的位置。
- w 和 h 是邊界框的寬度和高度,相對于整個圖像。
- confidence 是邊界框中包含目標的置信度。
- C 個類別概率用于表示該邊界框屬于每個類別的概率。
- 因此,檢測頭的輸出尺寸為 SxSx(B*(5+C))。
-
損失函數:
- YOLO 的損失函數包括三個部分:
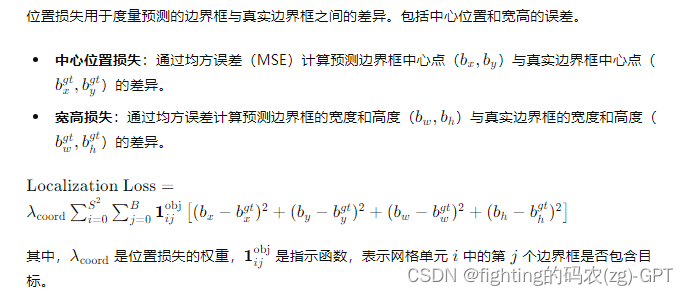
- 位置損失(Localization Loss):預測的邊界框與真實邊界框之間的差異。
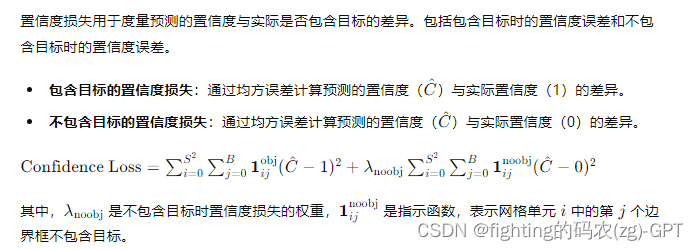
- 置信度損失(Confidence Loss):預測的置信度與實際是否包含目標的差異。
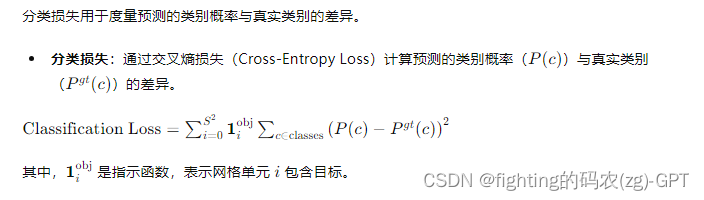
- 分類損失(Classification Loss):預測的類別概率與實際類別的差異。
- YOLO 的損失函數包括三個部分:
-
非極大值抑制(NMS):
- YOLO 可能會產生多個重疊的邊界框,為了去除冗余,使用非極大值抑制(NMS)來過濾掉置信度較低的框,保留置信度最高的框。
具體細節如下:
-
輸入圖像處理:
- 圖像被調整到一個固定的大小,并標準化處理。
- 圖像被劃分為 SxS 的網格,每個網格單元負責檢測一個特定區域內的目標。
-
特征提取器(例如 Darknet-53):
- 由一系列的卷積層、池化層和激活函數(如 ReLU 或 Leaky ReLU)組成。
- 輸出一個特征圖,這個特征圖包含了圖像的空間特征。
-
檢測頭:
- 在 YOLOv3 中,使用了多尺度檢測,分別在三個不同的尺度上進行預測。
- 每個尺度的檢測頭會輸出不同大小的特征圖(例如 13x13、26x26、52x52),每個特征圖的每個單元預測多個邊界框。
-
邊界框預測:
- 每個網格單元預測 B 個邊界框,每個邊界框包含 4 個位置參數(tx, ty, tw, th)、1 個置信度、以及 C 個類別概率。
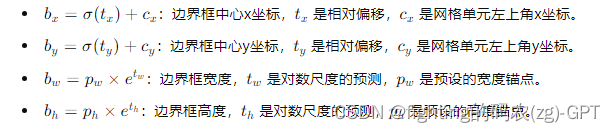
- 使用以下公式將網絡的輸出轉換為實際邊界框坐標:
- bx = σ(tx) + cx
- by = σ(ty) + cy
- bw = pw * e^tw
- bh = ph * e^th
- 其中 (cx, cy) 是網格單元的左上角坐標,pw 和 ph 是預測框的預設寬度和高度。
-
損失函數:
- YOLO 的損失函數由位置誤差、置信度誤差和分類誤差組成。
- 使用均方誤差(MSE)計算位置誤差。
- 使用交叉熵損失(Cross-Entropy Loss)計算分類誤差。
-
后處理(如非極大值抑制):
- 通過非極大值抑制(NMS)去除冗余的邊界框,只保留最可信的檢測結果。
以上是 YOLO 目標檢測頭的詳細解析,如果你有更具體的問題或需要進一步的細節,可以繼續提問。
YOLO檢測頭的輸出尺寸為SxSx(B(5+C))。這是通過分析YOLO的設計和預測目標檢測框的方式得出的。下面是詳細的解釋:*
-
網格劃分(Grid Division):
- 輸入圖像被劃分為一個SxS的網格。例如,假設輸入圖像大小為 416x416,YOLO可能會將其劃分為一個 13x13 或 19x19 的網格。
- 每個網格單元負責預測該單元內是否有目標,以及目標的具體信息。
-
每個網格單元的預測:
- 每個網格單元預測 ( B ) 個邊界框。典型的值為 ( B = 2 ) 或 ( B = 3 )。
- 每個邊界框包含5個預測參數和C個類別概率。
-
邊界框參數:
- 5個預測參數分別為:
- ( x ) 和 ( y ):邊界框中心相對于網格單元的位置偏移。
- ( w ) 和 ( h ):邊界框的寬度和高度,相對于整個圖像的比例。
- ( confidence ):該邊界框包含目標的置信度。
- 5個預測參數分別為:
-
類別概率:
- 每個邊界框預測C個類別概率,即該框屬于每個類別的概率分布。
- 因此,對于每個邊界框,我們需要預測 ( 5 + C ) 個值。
-
總輸出:
- 對于每個網格單元,預測 ( B ) 個邊界框,每個邊界框包含 ( 5 + C ) 個值。
- 因此,每個網格單元的輸出尺寸為 ( B x (5 + C) )。
將這些結合起來,整個輸出特征圖的尺寸為 SxSx(B*(5+C))。
具體例子
假設我們使用YOLOv3,輸入圖像被劃分為 13x13 的網格,B=3,C=80(例如在COCO數據集上):
-
網格劃分:
- ( S = 13 ),輸入圖像被劃分為 13x13 的網格。
-
每個網格單元的預測:
- 每個網格單元預測3個邊界框。
- 每個邊界框包含 ( 5 + 80 ) 個值(x, y, w, h, confidence + 80個類別概率)。
-
總輸出:
- 每個網格單元的輸出尺寸為 ( 3 x (5 + 80) = 3 x 85 = 255 )。
- 因此,整個輸出特征圖的尺寸為 ( 13 x 13 x 255 )。
YOLO檢測頭的輸出尺寸為 ( S x Sx (B x (5 + C)) ) 是通過考慮每個網格單元的預測邊界框數量、每個邊界框的參數數量以及類別數量計算得出的。這種設計使得YOLO能夠在單次前向傳遞中完成目標檢測。
在YOLO中,邊界框預測是通過將網絡的輸出轉換為實際的邊界框坐標來實現的。以下是詳細的解釋和一個例子:
詳細解釋
-
輸出預測:
- 每個網格單元預測B個邊界框,每個邊界框包含4個位置參數(( t_x, t_y, t_w, t_h ))、1個置信度、以及C個類別概率。
- ( t_x ) 和 ( t_y ) 是相對于網格單元左上角的偏移,范圍在0到1之間。
- ( t_w ) 和 ( t_h ) 是邊界框寬度和高度的對數尺度。
-
轉換公式:
- 將網絡輸出的4個位置參數轉換為實際的邊界框坐標。
- ( b_x = S(t_x) + c_x ):邊界框中心的x坐標。( S) 是sigmoid函數,將輸出限制在0到1之間。( c_x ) 是網格單元左上角的x坐標。
- ( b_y = S(t_y) + c_y ):邊界框中心的y坐標。( c_y ) 是網格單元左上角的y坐標。
- ( b_w = p_w x e^{t_w} ):邊界框的寬度。( p_w ) 是預設的寬度錨點。
- ( b_h = p_h x e^{t_h} ):邊界框的高度。( p_h ) 是預設的高度錨點。
舉例
假設我們有一個13x13的網格,輸入圖像大小為416x416,使用了3個邊界框預測(B=3),每個邊界框的錨點寬度和高度分別為(pw, ph)。
-
假設網格單元 (i, j):
- 該網格單元的左上角坐標為 (i, j)。
- 假設 i=5, j=7,那么 ( c_x = 5 ), ( c_y = 7 )。
-
預測參數:
- 網絡輸出的預測參數 ( t_x = 0.5 ), ( t_y = 0.6 ), ( t_w = -0.2 ), ( t_h = 0.3 )。
- 錨點寬度和高度分別為 ( p_w = 1.2 ), ( p_h = 1.8 )。
-
轉換實際邊界框坐標:

-
實際邊界框坐標:
- 邊界框中心坐標: ( (5.622, 7.645) )
- 邊界框寬度和高度: ( (0.982, 2.428) )
解釋關鍵點
- Sigmoid函數:用來將 ( t_x ) 和 ( t_y ) 的輸出值限制在0到1之間,這樣它們可以表示相對于網格單元的偏移量。
- 指數函數:用來將 ( t_w ) 和 ( t_h ) 的對數尺度轉換為實際的邊界框寬度和高度,錨點寬度和高度是預設的,表示預測框的基本尺度。
完整公式
通過這些公式,YOLO可以將網絡輸出的預測參數轉換為實際的邊界框坐標,用于目標檢測。
YOLO 的損失函數由三個主要部分組成:位置損失(Localization Loss)、置信度損失(Confidence Loss)和分類損失(Classification Loss)。以下是每個部分的詳細解釋及舉例:
1. 位置損失(Localization Loss)
2. 置信度損失(Confidence Loss)
3. 分類損失(Classification Loss)
損失函數的總和
總損失函數是位置損失、置信度損失和分類損失的總和。

舉例
假設一個13x13的網格,B=2,C=3(例如3個類別:貓、狗、鳥)。輸入圖像大小為416x416,錨點寬度和高度分別為(pw, ph)。
假設:
- 真值(ground truth)邊界框中心點 (bx_gt, by_gt) = (5.5, 7.2),寬度和高度 (bw_gt, bh_gt) = (2.0, 3.0),類別為貓(類別索引0)。
- 預測邊界框中心點 (bx, by) = (5.6, 7.1),寬度和高度 (bw, bh) = (2.1, 2.9),置信度 = 0.8,類別概率 [0.7, 0.2, 0.1](分別對應貓、狗、鳥)。
位置損失:

置信度損失:

分類損失:

總損失:

通過這些計算,可以看到如何從YOLO的預測結果和真值計算出總損失。這些損失會用于反向傳播,以優化YOLO網絡的參數,使得模型預測的邊界框和類別越來越準確。
非極大值抑制(NMS)是一種在目標檢測中常用的后處理技術,用于去除多余的檢測框。YOLO 在預測過程中,可能會生成多個重疊的邊界框,這些邊界框可能會對同一個目標進行多次檢測。NMS 的目標是通過保留置信度最高的邊界框,去除那些冗余的、置信度較低的邊界框,從而精簡檢測結果。
NMS 的工作原理
-
輸入:
- 一組邊界框,每個邊界框包括坐標(x, y, w, h)和一個置信度分數。
-
步驟:
- 按置信度排序:將所有邊界框按照置信度分數從高到低排序。
- 選取最高置信度框:選取置信度最高的邊界框,稱之為
A,并將其加入最終的檢測結果中。 - 計算重疊區域:計算
A與剩余邊界框之間的重疊區域(IoU,Intersection over Union)。 - 移除重疊框:移除與
A的重疊程度超過某一閾值的邊界框(例如 IoU > 0.5)。 - 重復步驟:從剩余的邊界框中再次選取置信度最高的框,并重復上述過程,直到所有的框都處理完畢。
-
輸出:
- 經過篩選后的邊界框集合,每個邊界框代表一個獨立的目標檢測。
舉例
假設我們有5個邊界框,它們的置信度和坐標如下:
| 框ID | 置信度 | x | y | w | h |
|---|---|---|---|---|---|
| A | 0.9 | 30 | 40 | 50 | 60 |
| B | 0.8 | 32 | 42 | 48 | 58 |
| C | 0.75 | 28 | 38 | 52 | 62 |
| D | 0.6 | 100 | 200 | 30 | 40 |
| E | 0.4 | 29 | 39 | 51 | 61 |
步驟1:按置信度排序
排序后的邊界框為:A, B, C, D, E
步驟2:選取置信度最高的框A
將邊界框A加入最終檢測結果中。
步驟3:計算重疊區域(IoU)
計算A與剩余邊界框(B, C, D, E)之間的IoU:
- IoU(A, B)
- IoU(A, C)
- IoU(A, D)
- IoU(A, E)
假設計算的IoU如下:
- IoU(A, B) = 0.85
- IoU(A, C) = 0.8
- IoU(A, D) = 0.0
- IoU(A, E) = 0.82
步驟4:移除重疊框
設定閾值為0.5,移除IoU超過0.5的框(B, C, E),僅保留框D。
步驟5:重復步驟
- 從剩余的框中選取置信度最高的框,即D。
- 將D加入最終檢測結果中。
- D沒有與其他框重疊的情況,結束過程。
最終結果
經過NMS后的最終檢測結果為:
- 框A(置信度0.9,坐標[30, 40, 50, 60])
- 框D(置信度0.6,坐標[100, 200, 30, 40])
代碼示例(Python)
下面是一個使用Python實現NMS的簡單代碼示例:
import numpy as npdef iou(box1, box2):x1, y1, w1, h1 = box1x2, y2, w2, h2 = box2xi1 = max(x1, x2)yi1 = max(y1, y2)xi2 = min(x1 + w1, x2 + w2)yi2 = min(y1 + h1, y2 + h2)inter_area = max(0, xi2 - xi1) * max(0, yi2 - yi1)box1_area = w1 * h1box2_area = w2 * h2union_area = box1_area + box2_area - inter_areareturn inter_area / union_areadef non_max_suppression(boxes, scores, iou_threshold):idxs = np.argsort(scores)[::-1]selected_idxs = []while len(idxs) > 0:current = idxs[0]selected_idxs.append(current)idxs = idxs[1:]idxs = [i for i in idxs if iou(boxes[current], boxes[i]) < iou_threshold]return selected_idxs# Example usage:
boxes = [[30, 40, 50, 60], [32, 42, 48, 58], [28, 38, 52, 62], [100, 200, 30, 40], [29, 39, 51, 61]]
scores = [0.9, 0.8, 0.75, 0.6, 0.4]
iou_threshold = 0.5selected_idxs = non_max_suppression(boxes, scores, iou_threshold)
print("Selected boxes after NMS:", [boxes[i] for i in selected_idxs])
總結
非極大值抑制(NMS)通過保留置信度最高的邊界框并移除重疊的置信度較低的邊界框,有效地去除了冗余檢測框,使得目標檢測結果更加精簡和準確。
下面是iou函數的詳細理論計算過程:
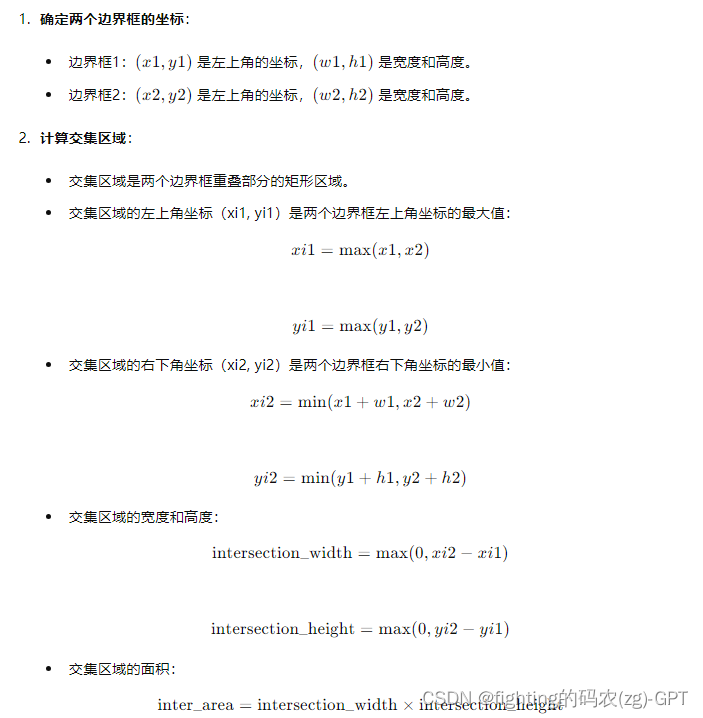
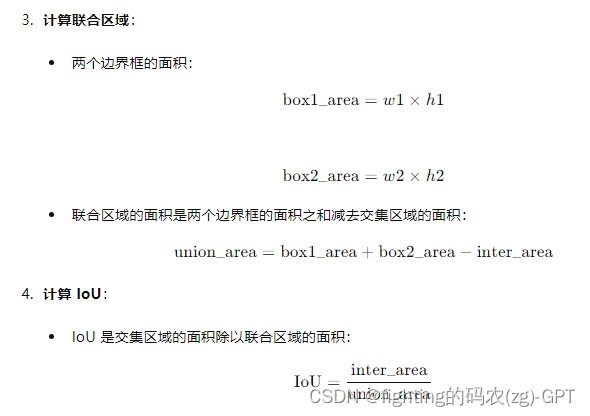
Intersection over Union (IoU) 的計算
IoU 是衡量兩個邊界框重疊區域與它們的聯合區域之間比值的一種指標。計算過程分為以下幾步:
代碼詳細注釋
def iou(box1, box2):# 獲取第一個邊界框的坐標和尺寸x1, y1, w1, h1 = box1# 獲取第二個邊界框的坐標和尺寸x2, y2, w2, h2 = box2# 計算交集區域的左上角坐標xi1 = max(x1, x2)yi1 = max(y1, y2)# 計算交集區域的右下角坐標xi2 = min(x1 + w1, x2 + w2)yi2 = min(y1 + h1, y2 + h2)# 計算交集區域的寬度和高度(確保交集寬高不為負)inter_width = max(0, xi2 - xi1)inter_height = max(0, yi2 - yi1)# 計算交集區域的面積inter_area = inter_width * inter_height# 計算兩個邊界框的面積box1_area = w1 * h1box2_area = w2 * h2# 計算聯合區域的面積union_area = box1_area + box2_area - inter_area# 計算 IoU(交集面積 / 聯合面積)return inter_area / union_area
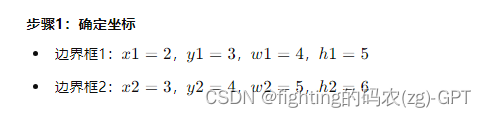
舉例
假設有兩個邊界框:
- 邊界框1:左上角坐標為(2, 3),寬度和高度分別為4和5。
- 邊界框2:左上角坐標為(3, 4),寬度和高度分別為5和6。
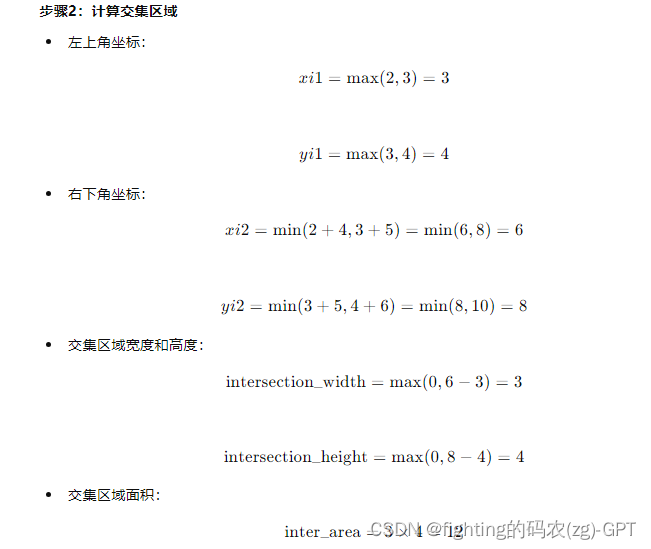
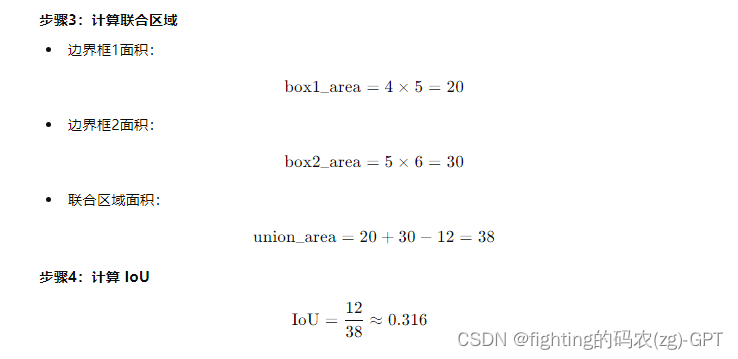
通過這些步驟,我們計算出了兩個邊界框之間的 IoU 值為約 0.316。這表示兩個邊界框的重疊區域占它們聯合區域的 31.6%。
】磁盤管理與文件系統 LVM與磁盤配額(二))
)

![[MYSQL] MYSQL表的操作](http://pic.xiahunao.cn/[MYSQL] MYSQL表的操作)

)









 熟悉ArkUI)



