大家好,這里是G-LAB IT實驗室。今天帶大家學習一下華為動態路由實驗配置,新手入門,快速掌握核心知識點!
01、實驗拓撲
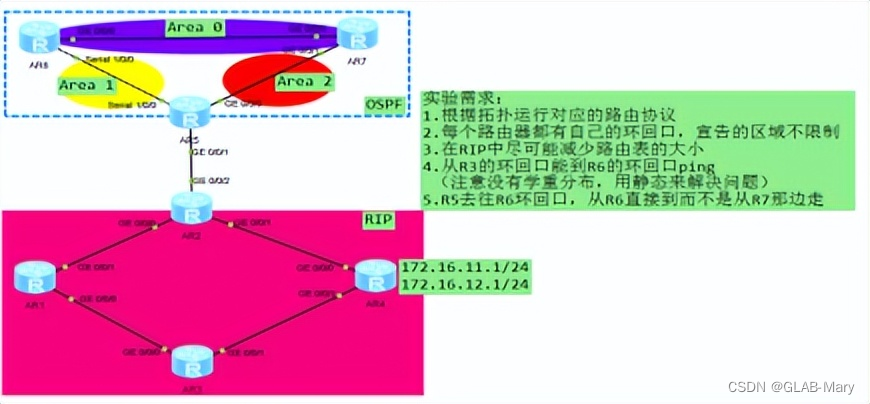
02、實驗需求
1.根據拓撲運行對應的路由協議
2.每個路由器都有自己的環回口,宣告的區域不限制
3.在RIP中盡可能減少路由表的大小
4.從R3的環回口能到R6的環回口ping(注意沒有學重分布,用靜態來解決問題)
5.RS去往R6壞回口,從R6直接到而不是從R7那邊走
03、實驗步驟
a.基礎接口地址配置
R1:
[R1]int lo0
[R1-LoopBack0]ip add 11.1.1.1 24
[R1]int g0/0/0
[R1-GigabitEthernet0/0/0]ip add 13.1.1.1 24
[R1]int g0/0/1
[R1-GigabitEthernet0/0/1]ip add 12.1.1.1 24
R2:
[R2]int lo0
[R2-LoopBack0]ip add 22.1.1.1 24
[R2]int g0/0/0
[R2-GigabitEthernet0/0/0]ip add 12.1.1.2 24
[R2]int g0/0/1
[R2-GigabitEthernet0/0/1]ip add 24.1.1.2 24
[R2]int g0/0/2
[R2-GigabitEthernet0/0/2]ip add 25.1.1.2 24
R3:
[R3]int lo0
[R3-LoopBack0]ip add 33.1.1.1 24
[R3]int g0/0/0
[R3-GigabitEthernet0/0/0]ip add 13.1.1.3 24
[R3]int g0/0/1
[R3-GigabitEthernet0/0/1]ip add 34.1.1.3 24
R4:
[R4]int lo0
[R4-LoopBack0]ip add 44.1.1.1 24
[R4]int lo1
[R4-LoopBack1]ip add 172.16.11.1 24
[R4]int lo2
[R4-LoopBack2]ip add 172.16.12.1 24
[R4]int g0/0/0
[R4-GigabitEthernet0/0/0]ip add 24.1.1.4 24
[R4]int g0/0/1
[R4-GigabitEthernet0/0/1]ip add 34.1.1.4 24
R5:
[R5]int lo0
[R5-LoopBack0]ip add 55.1.1.1 24
[R5]int g0/0/0
[R5-GigabitEthernet0/0/0]ip add 57.1.1.5 24
[R5]int g0/0/1
[R5-GigabitEthernet0/0/1]ip add 25.1.1.5 24
[R5]int s1/0/0
[R5-Serial1/0/0]ip add 56.1.1.5 24
R6:
[R6]int lo0
[R6-LoopBack0]ip add 66.1.1.1 24
[R6]int g0/0/0
[R6-GigabitEthernet0/0/0]ip add 67.1.1.6 24
[R6]int s1/0/0
[R6-Serial1/0/0]ip add 56.1.1.6 24
R7:
[R7]int lo0
[R7-LoopBack0]ip add 77.1.1.1 24
[R7]int g0/0/0
[R7-GigabitEthernet0/0/0]ip add 67.1.1.7 24
[R7]int g0/0/1
[R7-GigabitEthernet0/0/1]ip add 57.1.1.7 24
b.運行相對應動態路由協議
R1:
[R1]rip (運行RIP路由協議)
[R1-rip-1]version 2 (版本2)
[R1-rip-1]undo summary (關閉自動匯總)
[R1-rip-1]network 11.0.0.0 (主類宣告)
[R1-rip-1]network 12.0.0.0
[R1-rip-1]network 13.0.0.0
R2:
[R2]rip (運行RIP路由協議)
[R2-rip-1]version 2 (版本2)
[R2-rip-1]undo summary (關閉自動匯總)
[R2-rip-1]network 22.0.0.0 (主類宣告)
[R2-rip-1]network 12.0.0.0
[R2-rip-1]network 24.0.0.0
R3:
[R3]rip (運行RIP路由協議)
[R3-rip-1]version 2 (版本2)
[R3-rip-1]undo summary (關閉自動匯總)
[R3-rip-1]network 33.0.0.0 (主類宣告)
[R3-rip-1]network 13.0.0.0
[R3-rip-1]network 34.0.0.0
R4:
[R4]rip (運行RIP路由協議)
[R4-rip-1]version 2 (版本2)
[R4-rip-1]undo summary (關閉自動匯總)
[R4-rip-1]network 44.0.0.0 (主類宣告)
[R4-rip-1]network 172.16.0.0
[R4-rip-1]network 24.0.0.0
[R4-rip-1]network 34.0.0.0
此時R2上應該能收到7條rip路由(五個環回口,兩個物理鏈路):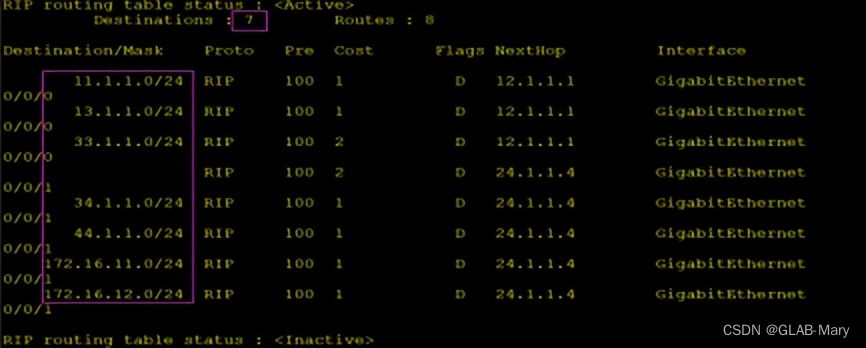
R5:
[R5]ospf 1 (運行OSPF協議)
[R5-ospf-1]area 1
[R5-ospf-1-area-0.0.0.1]network 55.1.1.0 0.0.0.255
[R5-ospf-1-area-0.0.0.1]network 56.1.1.0 0.0.0.255
(環回口,S1/0/0口宣告進區域1)
[R5-ospf-1]area 2
[R5-ospf-1-area-0.0.0.2]network 57.1.1.0 0.0.0.255
(g0/0/0口宣告進區域2)
R6:
[R6]ospf 1 (運行OSPF協議)
[R6-ospf-1]ar 0
[R6-ospf-1-area-0.0.0.0]network 66.1.1.0 0.0.0.255
[R6-ospf-1-area-0.0.0.0]network 67.1.1.0 0.0.0.255
(環回口,g0/0/0口宣告進區域0)
[R6-ospf-1]area 1
[R6-ospf-1-area-0.0.0.1]network 56.1.1.0 0.0.0.255
(S1/0/0口宣告進區域1)
R7:
[R7]ospf 1 (運行OSPF協議)
[R7-ospf-1]area 0
[R7-ospf-1-area-0.0.0.0]network 77.1.1.0 0.0.0.255
[R7-ospf-1-area-0.0.0.0]network 67.1.1.0 0.0.0.255
(環回口和g0/0/0口宣告進區域0)
[R7-ospf-1]area 2
[R7-ospf-1-area-0.0.0.2]network 57.1.1.0 0.0.0.255
(g0/0/1口宣告進區域2)
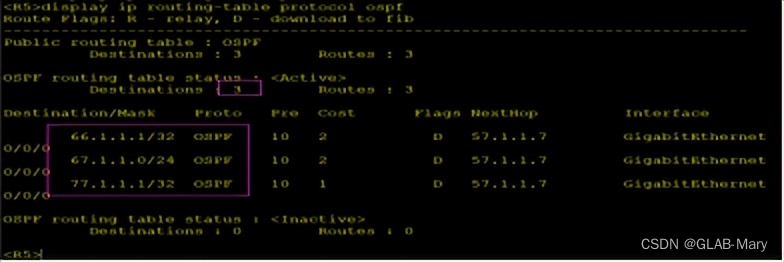
此時R5應該有2個OSPF鄰居,并能學習到3條OSPF路由(兩個環回口和一個物理鏈路):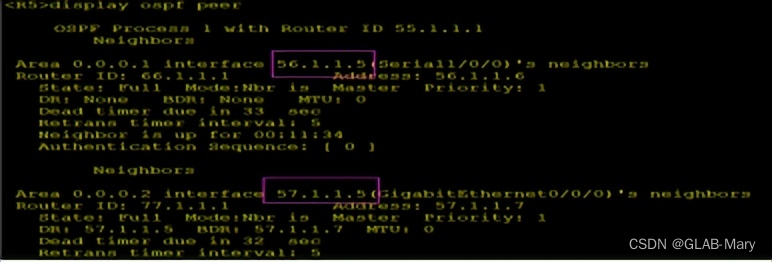
c.RIP精簡路由表
R2能通過RIP學習到7條RIP路由,其中172.16.11.0/24和172.16.12.0/24的路由可以通過手動匯總成一條路由:
R4:
[R4]int g0/0/0
[R4-GigabitEthernet0/0/0]rip summary-address 172.16.8.0 255.255.248.0
[R4]int g0/0/1
[R4-GigabitEthernet0/0/1]rip summary-address 172.16.8.0 255.255.248.0
(物理接口下配置RIP手動匯總)
此時在R2上能通過RIP學習到6條RIP路由,原先的172.16.11.0/24和172.16.12.0/24的路由通過手動匯總成一條路由172.16.8.0/21: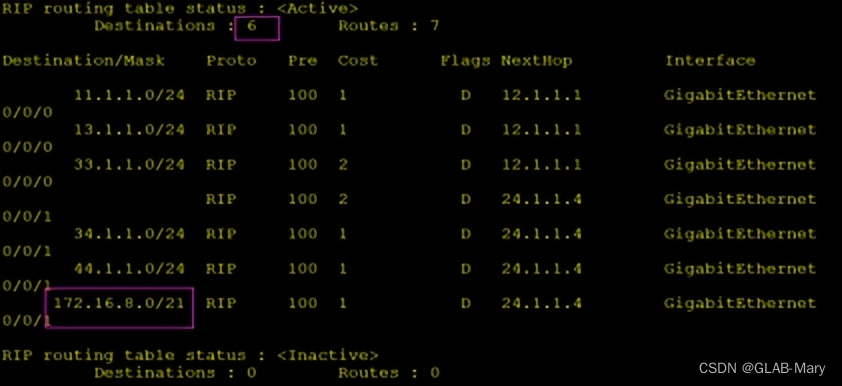
d.R3和R6的環回口通信
我們發現兩種路由協議之間沒有任何聯系,兩種路由協議的邊界路由器R2和R5都沒有對端協議的路由,所以我們先用靜態路由解決邊界路由不通協議通信問題:
[R2]ip route-static 0.0.0.0 0.0.0.0 25.1.1.5
[R5]ip route-static 0.0.0.0 0.0.0.0 25.1.1.2
靜態路由只能解決邊界路由器的路由問題,但是R3和R6上都只有各自協議的路由,并沒有對端的路由,所以我們需要配置動態路由協議下發默認路由,讓R3和R6能將去往對端的路由丟給邊界路由器。
R2:
[R2]rip
[R2-rip-1]default-route originate
R1/R3/R4上都會多出一條RIP的默認路由: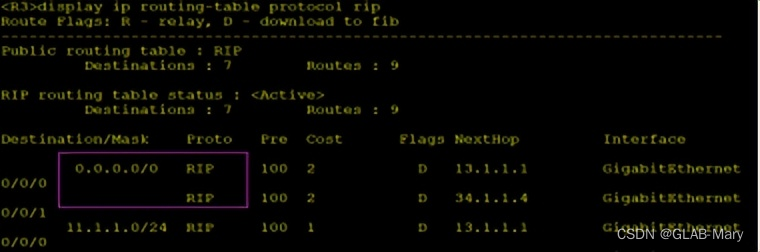
R5:
[R5]ospf 1
[R5-ospf-1]default-route-advertise
(由于R5上有默認路由,所以不需要加always)
R6/R7上都會多出一條OSPF的默認路由: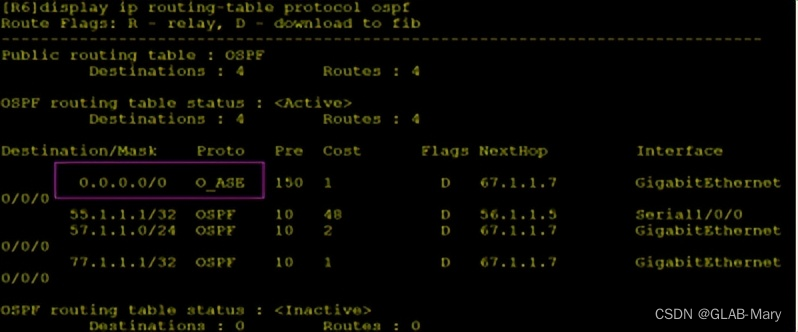
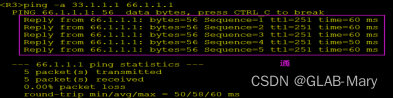
此時R3跟R6的環回口通信情況為:
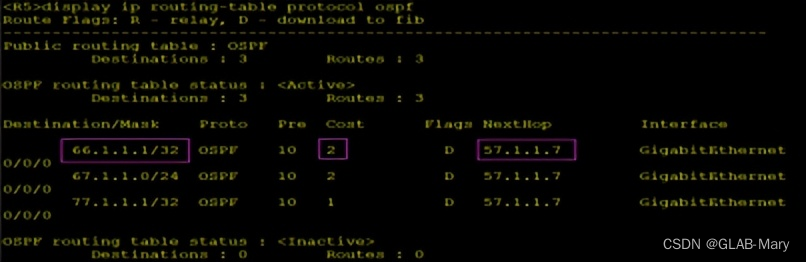
e.R5和R6的環回口通信
此時R5去往R6的環回口路徑是從R7走的,因為OSPF的選路只跟路由流向的入接口cost有關,華為S口cost默認是48,以太口cost默認是1,環回口cost默認是0,從R6直接過來的環回口路由cost為48,從R7學到的R6環回口路由cost為2,所以優選從R7學。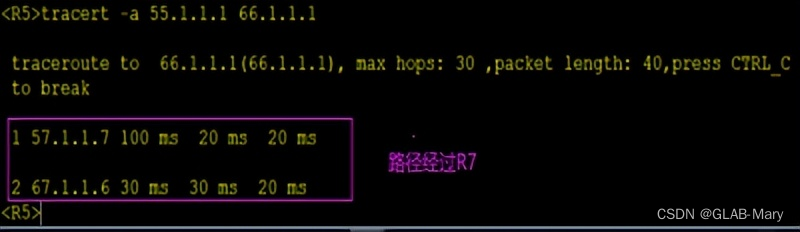
要想讓R5去往R6的環回口是直接從R6走,那么只需要修改路由流向的入接口COST即可(比如將R5的g0/0/0接口cost修改的比47大):
R5:
[R5]int g0/0/0
[R5-GigabitEthernet0/0/0]ospf cost 48
此時R5學習到R6的環回口路由下一跳為R6,路由cost為48:
以上就是華為初級中需要學會的實驗配置
G-LAB IT實驗室課程
)



介紹)



)
需求過程)
報錯)








)