摘要
本文深入探討了 SimLingo,一個在自動駕駛領域具有開創性意義的視覺-語言-動作一體化模型。SimLingo 創新性地將自動駕駛、語言理解和指令感知控制整合到一個統一的純攝像頭框架中,顯著提升了自動駕駛系統在復雜環境中的感知、決策與執行能力。該模型在 CARLA Leaderboard 2.0 和 Bench2Drive 等權威基準測試中表現卓越,并在 2024 年 CARLA 挑戰賽中榮獲桂冠,充分證明了其在模擬環境下的強大性能和魯棒性。SimLingo 的核心優勢在于其不依賴激光雷達或雷達等昂貴傳感器,僅通過強大的視覺-語言骨干網絡(InternVL2-1B 和 Qwen2-0.5B)便實現了高水平的自主駕駛,為未來自動駕駛技術的成本效益和可解釋性發展奠定了基礎。本文將詳細闡述 SimLingo 的架構、關鍵創新——動作想象(Action Dreaming)與思維鏈注釋(Chain-of-Thought Annotation),并分析其在駕駛和語言理解任務中的高性能表現,最后探討其開源生態系統、突出優勢以及未來的發展方向。
1. 引言
隨著人工智能技術的飛速發展,自動駕駛已成為當今研究領域的熱點之一。傳統的自動駕駛系統通常采用模塊化設計,將感知、決策和控制等環節獨立處理,這在一定程度上限制了系統在復雜動態環境中的整體性能和適應性。此外,對昂貴傳感器的過度依賴也使得自動駕駛技術的普及面臨成本挑戰。近年來,多模態學習,特別是視覺-語言模型(Vision-Language Models, VLMs)的興起,為自動駕駛領域帶來了新的突破口。VLMs 能夠同時處理視覺信息和自然語言指令,使得自動駕駛系統不僅能夠“看懂”世界,還能“理解”人類意圖,從而實現更高級別的自主性和人機交互。
SimLingo 正是在這一背景下應運而生,它代表了自動駕駛領域從傳統模塊化向端到端、多模態融合的范式轉變。該模型的核心理念在于構建一個統一的框架,使得車輛能夠通過純視覺輸入,實現對環境的全面感知、對自然語言指令的深刻理解以及精準的駕駛動作控制。這種一體化的設計不僅簡化了系統架構,降低了對多源異構傳感器的依賴,更重要的是,它使得自動駕駛系統能夠像人類駕駛員一樣,在復雜的交通場景中進行高級別的推理和決策,并以自然語言的形式解釋其行為,從而顯著提升了系統的透明度和可信度。
本文旨在對 SimLingo 模型進行全面而深入的分析。我們將首先概述 SimLingo 的整體架構及其在自動駕駛、語言理解和指令感知控制方面的獨特融合。接著,我們將詳細探討其兩大核心創新:動作想象(Action Dreaming)機制,該機制如何通過生成多個潛在未來軌跡來增強模型對語言指令的理解和遵循能力;以及思維鏈注釋(Chain-of-Thought Annotation),它如何為模型的決策過程提供可解釋性,從而促進調試和驗證。隨后,我們將展示 SimLingo 在 CARLA Leaderboard 2.0 和 Bench2Drive 等基準測試中的卓越性能,并分析其在駕駛分數、語言理解和指令遵循方面的具體表現。此外,本文還將介紹 SimLingo 完整的開源生態系統,包括其龐大的數據集、數據收集與訓練腳本以及預訓練模型,這些資源極大地促進了相關研究的進展。最后,我們將總結 SimLingo 的突出優勢,并展望其在現實世界部署、人機交互以及更廣泛機器人框架中的未來發展方向,同時指出當前面臨的挑戰和潛在的改進途徑。
通過對 SimLingo 的深入剖析,我們希望能夠為讀者提供一個全面的視角,理解當前自動駕駛領域前沿技術的發展趨勢,以及視覺-語言-動作一體化模型在實現更智能、更安全、更具成本效益的自主駕駛系統方面所展現出的巨大潛力。
2. 一體化的感知、理解和動作
傳統的自動駕駛系統通常采用一種分層或模塊化的架構,其中感知、規劃和控制是相互獨立的組件。感知模塊負責從傳感器數據中提取環境信息,如車輛、行人、車道線等;規劃模塊根據感知結果和預設規則生成行駛路徑和行為決策;控制模塊則將規劃結果轉化為車輛的實際操作指令(如轉向、加速、制動)。這種模塊化設計雖然有助于問題的分解和獨立開發,但也帶來了信息傳遞延遲、誤差累積以及各模塊之間難以協同優化等問題,尤其是在面對復雜、不確定性高的交通場景時,其魯棒性和泛化能力往往受到限制。
與此形成鮮明對比的是,SimLingo 采用了一種革命性的一體化(End-to-End)融合方法,將感知、理解和動作功能無縫地整合到一個統一的框架中。這意味著 SimLingo 不再將這些功能視為獨立的步驟,而是作為一個整體進行學習和優化。其核心在于直接從原始視覺輸入(例如攝像頭圖像)出發,通過一個強大的視覺-語言骨干網絡,直接輸出即時駕駛控制指令,同時還能處理復雜的自然語言查詢并遵循口頭指令。這種端到端的方法模仿了人類駕駛員的認知過程,即通過視覺觀察、理解意圖并直接執行操作,從而避免了傳統模塊化系統中可能存在的“信息瓶頸”和“決策割裂”問題。
具體而言,SimLingo 的一體化能力體現在以下三個關鍵方面:
- 駕駛(Driving):模型能夠直接從攝像頭圖像中學習并生成高精度的駕駛控制信號,包括轉向角度、油門和剎車指令。這使得車輛能夠自主地在車道內行駛、避開障礙物、遵守交通規則,并在各種交通狀況下保持平穩安全的駕駛。
- 理解(Understanding):SimLingo 具備強大的語言理解能力,能夠解析關于場景的自然語言問題。例如,用戶可以詢問“前方有多少輛車?”或“紅綠燈是什么顏色?”,模型能夠基于其對視覺場景的理解給出準確的回答。這種能力使得系統能夠與用戶進行更深層次的交互,并提供情境感知的信息。
- 解釋(Interpreting):除了理解和駕駛,SimLingo 還能遵循復雜的口頭指令,例如“在下一個路口左轉”、“減速通過學校區域”或“超車”。這意味著模型不僅能夠執行預設的駕駛任務,還能根據人類的實時指令調整其行為。這種指令遵循能力是實現高級人機協作和個性化駕駛體驗的關鍵。
這種“駕駛、理解、解釋”的三角能力被巧妙地封裝在一個單一的實時模型中,實現了道路上更豐富、更智能的交互和適應性。通過這種高度整合的設計,SimLingo 克服了傳統自動駕駛系統在復雜性和魯棒性方面的局限性,為實現真正智能、自主且與人類意圖高度對齊的自動駕駛系統提供了新的范式。它不僅提升了駕駛性能,更重要的是,為未來自動駕駛系統與人類的自然交互和行為解釋奠定了堅實的基礎,使其能夠更好地融入人類社會并獲得用戶的信任。
3. 教語言來駕駛:動作想象(Action Dreaming)如何工作
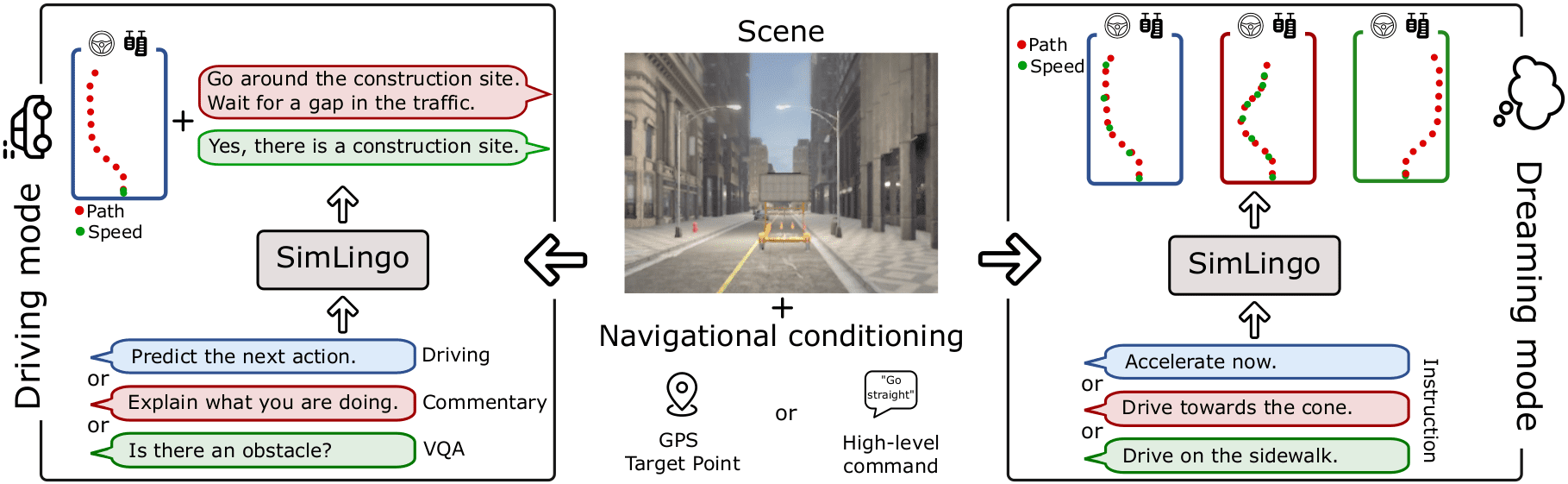
圖 1:SimLingo 模型概述,展示了其如何將視覺輸入、語言指令和駕駛動作整合到一個統一的框架中。
在自動駕駛領域,模仿學習(Imitation Learning)是一種常見的訓練范式,模型通過觀察專家(如人類駕駛員或高性能控制器)在特定環境下的行為來學習駕駛策略。然而,傳統的模仿學習方法存在一個顯著的局限性:當視覺輸入(即攝像頭圖像)保持不變時,模型傾向于復制專家在相同視覺條件下的單一動作,而忽略了可能存在的多種合理動作選擇,尤其是在需要根據語言指令進行決策的場景中。例如,在十字路口,即使視覺輸入相同,根據“左轉”或“直行”的指令,駕駛動作應截然不同。如果模型僅僅依賴視覺捷徑,它可能無法真正理解并遵循語言指令,從而導致指令遵循能力的缺失或泛化性差。
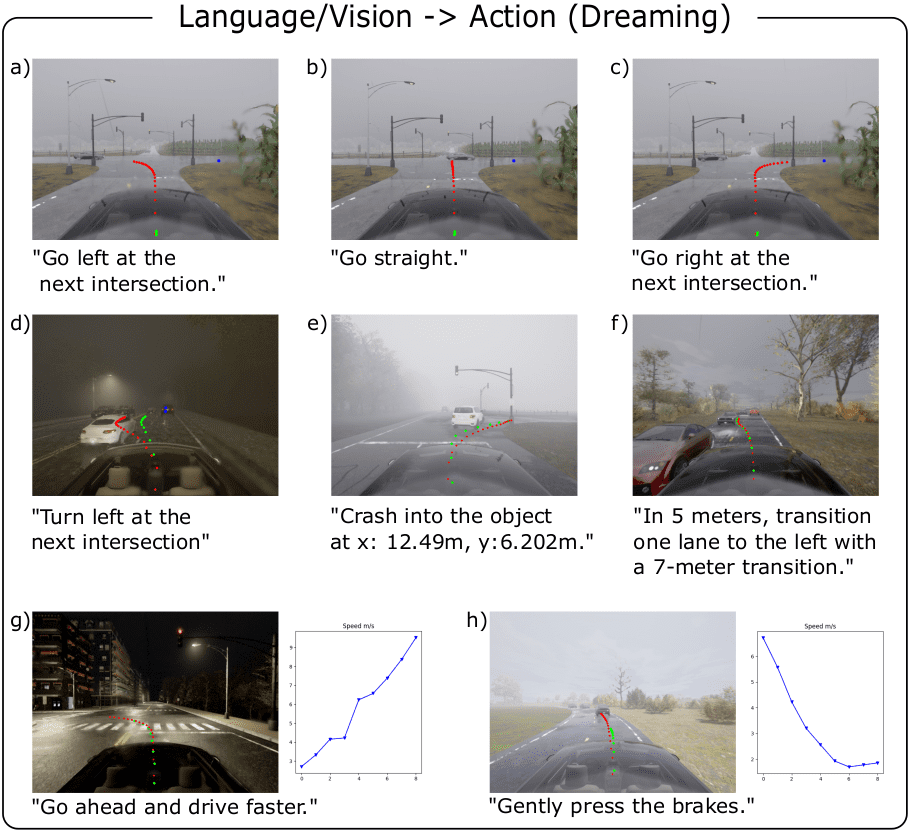
SimLingo 的突破性創新在于引入了**動作想象(Action Dreaming)**機制,旨在解決傳統模仿學習中語言指令被忽視的問題,并增強模型對多模態輸入的深層理解。動作想象的核心思想是,對于每一個給定的輸入幀,模型不僅僅學習一個單一的專家動作,而是被引導去“想象”或生成多個潛在的未來軌跡(即一系列可能的駕駛動作序列),每個軌跡都與一個獨特的語言指令相對應。這些指令可以是“左轉”、“加速”、“剎車”等具體操作,也可以是更抽象的意圖。
3.1 動作想象的機制
動作想象機制的工作流程可以概括如下:
- 多軌跡生成:對于一個給定的視覺觀測(例如當前時刻的攝像頭圖像),SimLingo 不僅考慮專家在該時刻執行的實際動作,還通過數據增強或生成模型,為該視覺輸入生成多個“假想”的未來駕駛軌跡。每個假想軌跡都代表了一種可能的駕駛行為,例如在十字路口選擇左轉、右轉或直行。
- 指令配對:每個生成的假想軌跡都會被明確地配對一個相應的語言指令。例如,如果一個軌跡描述了車輛向左轉彎,那么它將與“左轉”的指令相關聯;如果一個軌跡描述了車輛加速,則與“加速”指令關聯。這種顯式的配對強制模型在學習過程中將視覺信息與語言指令緊密結合起來。
- 多模態學習:在訓練過程中,模型被要求根據視覺輸入和給定的語言指令來預測正確的駕駛動作。由于存在多個與相同視覺輸入但不同語言指令配對的軌跡,模型被迫去學習如何區分這些指令,并根據指令調整其行為。這迫使模型不能僅僅依賴視覺特征,而是必須真正地將語言指令融入其決策過程。
- 強化語言理解:通過這種機制,SimLingo 能夠有效地避免“視覺捷徑”問題。模型不再僅僅復制專家在特定視覺條件下的行為,而是學習到如何根據不同的語言指令,在相同的視覺場景下生成不同的、合理的駕駛動作。這極大地增強了模型對語言指令的敏感性和遵循能力,使其不僅在視覺上準確,而且在語言上也具有高度的合理性和適應性。
3.2 動作想象的優勢
動作想象機制為 SimLingo 帶來了多方面的優勢:
- 增強指令遵循能力:模型能夠更準確地理解并執行復雜的自然語言指令,即使在視覺信息不足以完全確定動作的情況下也能做出正確響應。
- 提高泛化性:通過學習多種可能的軌跡和對應的指令,模型能夠更好地泛化到未曾見過的場景或指令組合,提高了其在真實世界復雜環境中的適應性。
- 促進多模態融合:該機制強制模型進行深層次的視覺-語言特征融合,使得視覺和語言信息在決策過程中發揮同等重要的作用,而非僅僅將語言作為輔助信息。
- 提升決策魯棒性:模型能夠考慮多種潛在的未來情景,從而做出更穩健、更安全的決策,尤其是在需要權衡不同行動方案的復雜交通狀況下。
通過動作想象,SimLingo 不僅學會了如何駕駛,更學會了如何“聽懂”并“思考”人類的語言指令,這使其在實現真正智能、交互式自動駕駛系統方面邁出了重要一步。這種機制為未來多模態具身智能體的訓練提供了寶貴的經驗,即如何有效地將語言作為一種強大的引導信號,塑造智能體的行為并提升其在復雜任務中的表現。
4. 模型內部:思維鏈注釋(Chain-of-Thought Annotation)
在人工智能領域,模型的可解釋性(Interpretability)和透明度(Transparency)日益受到關注,尤其是在自動駕駛等高風險應用中。用戶和開發者不僅希望模型能夠做出正確的決策,更希望理解其決策背后的原因。傳統的端到端模型雖然在性能上表現出色,但其“黑箱”特性使得內部決策過程難以追蹤和理解,這給調試、驗證和安全審計帶來了巨大挑戰。
SimLingo 在其內部設計中融入了**思維鏈注釋(Chain-of-Thought Annotation)**機制,為解決這一問題提供了創新性的解決方案。思維鏈注釋的核心思想是,在模型做出最終駕駛動作決策之前,它會生成一個簡短的、人類可讀的推理說明。這些說明本質上是模型對其當前感知和即將采取行動的“內心獨白”或“思考過程”的總結。
4.1 思維鏈注釋的機制與示例
思維鏈注釋的生成與應用流程如下:
- 推理過程的顯式化:在 SimLingo 的架構中,除了預測駕駛動作,模型還被訓練以生成一段文本,這段文本描述了模型如何從當前視覺輸入和語言指令中得出其駕駛決策。例如,當模型決定減速時,它可能會生成注釋:“前方有行人過馬路,減速”;當車道暢通時,它可能會生成:“車道暢通,保持速度”。
- 增強透明度:這些注釋為模型的決策過程提供了一個前所未有的“窗口”。開發人員和用戶現在可以實時地追蹤模型在每個時刻的“思考方式”。當模型出現錯誤或行為異常時,通過分析其生成的思維鏈注釋,可以更直觀地定位問題所在,從而大大簡化了調試和故障排除的過程。
- 促進驗證與審計:在自動駕駛等安全關鍵領域,模型的行為必須經過嚴格的驗證和審計。思維鏈注釋提供了一種新的審計線索,使得監管機構和安全工程師能夠更好地理解模型的決策邏輯,評估其是否符合安全規范和倫理標準。這有助于建立對自動駕駛系統的信任。
4.2 思維鏈注釋的價值與未來潛力
盡管在 SimLingo 的初步研究中,思維鏈注釋本身對模型的最終駕駛性能沒有顯著影響(即,模型是否生成注釋并不直接改變其駕駛行為的準確性),但其作為一種強大的可解釋性層,其價值不容忽視,并具有巨大的未來潛力:
- 調試與錯誤分析:當模型在特定場景下表現不佳時,思維鏈注釋可以幫助研究人員快速識別模型是“看錯了”(感知錯誤)、“想錯了”(推理錯誤)還是“做錯了”(控制錯誤),從而有針對性地進行模型改進。
- 用戶信任與接受度:對于普通用戶而言,能夠理解自動駕駛車輛的決策邏輯,將大大增加他們對系統的信任感和接受度。當車輛解釋其為何采取某一行動時,用戶會感到更加安心和可控。
- 法規遵從與認證:隨著自動駕駛法規的不斷完善,對模型可解釋性的要求將越來越高。思維鏈注釋為滿足這些法規要求提供了一種潛在的解決方案,有助于自動駕駛系統獲得必要的認證。
- 決策核心的潛力:雖然目前注釋主要用于解釋,但未來隨著研究的深入,思維鏈模塊有望成為模型決策過程的核心組成部分。例如,通過將思維鏈作為中間表示,可以進一步優化模型的推理能力,使其能夠進行更復雜、更具層次感的決策。
思維鏈注釋是 SimLingo 在追求高性能的同時,兼顧可解釋性的重要體現。它不僅提升了模型的透明度,也為未來自動駕駛系統在復雜社會環境中與人類進行更深層次的協作和互動奠定了基礎。這種機制的引入,標志著自動駕駛技術正從單純的“能開”向“能理解、能解釋”的高級智能邁進。
5. 高性能結果
SimLingo 在多個權威基準測試中展現了卓越的性能,尤其是在自動駕駛和語言理解任務上均取得了領先地位。這充分證明了其視覺-語言-動作一體化框架的有效性和強大能力。以下是 SimLingo 取得的關鍵高性能結果的詳細分析:
5.1 領先的駕駛分數
SimLingo 在自動駕駛領域的表現尤為突出,其在 CARLA Leaderboard 2.0 和 Bench2Drive 基準測試中均名列前茅。這些基準測試旨在評估自動駕駛系統在高度逼真和復雜的模擬環境中的實際駕駛能力。它們包含了數百個多樣化的閉環駕駛場景,涵蓋了從日常駕駛到極端情況的各種挑戰,例如:
- 緊急制動:在突然出現的障礙物或危險情況下,系統能否及時、安全地進行制動。
- 合并車道:在高速公路上,系統能否平穩、安全地并入主車道。
- 超車:在確保安全的前提下,系統能否有效地完成超車操作。
- 標志識別與遵守:系統能否準確識別各種交通標志(如停車標志、限速標志)并嚴格遵守。
- 復雜交叉路口處理:在沒有明確車道線或交通信號燈的復雜交叉路口,系統能否做出正確的決策并安全通過。
- 惡劣天氣條件:在雨、霧、雪等惡劣天氣下,系統能否保持穩定的感知和駕駛性能。
SimLingo 在這些嚴苛測試中的優異表現,表明其不僅能夠執行基本的駕駛任務,還能在面對高度動態和不確定性的場景時,展現出強大的魯棒性和決策能力。這得益于其端到端學習范式,使得模型能夠從大量的駕駛數據中學習到復雜的感知-決策-控制映射,從而在各種駕駛情境下做出最優響應。
5.2 強大的語言理解能力
除了卓越的駕駛性能,SimLingo 在語言理解方面也表現出強大的能力,這對于實現高級人機交互和指令遵循至關重要。其語言理解能力主要通過以下兩個方面進行評估:
- 駕駛場景的視覺問答(Visual Question Answering, VQA):SimLingo 在基于 GPT 的評估中,針對駕駛場景的 VQA 任務達到了近 79% 的準確率。這意味著模型能夠準確回答關于當前駕駛環境的各種問題,例如:“前方是否有車輛正在變道?”、“最近的交通信號燈是什么顏色?”或“路邊有多少個行人?”這種能力表明 SimLingo 能夠將視覺感知到的信息與語言理解相結合,從而對復雜的場景進行語義層面的推理和問答。
- 指令遵循(Instruction Following):SimLingo 在指令遵循方面的成功率約為 81%。這包括處理各種復雜的口頭指令,例如:“在下一個路口左轉”、“減速通過學校區域”、“保持當前車道”或“超車”。模型能夠根據這些指令調整其駕駛行為,這證明了其能夠將抽象的語言指令轉化為具體的駕駛動作。這種能力是實現人類駕駛員與自動駕駛系統之間自然、直觀交互的關鍵,使得用戶可以通過簡單的語音命令來控制車輛,而無需復雜的界面操作。
5.3 綜合性能與多模態協同
SimLingo 的一個顯著特點是其能夠在保持頂級駕駛結果的同時,在語言任務中也表現出色。這打破了傳統觀念中認為視覺、語言和控制能力難以在單一模型中高效共存的局面。SimLingo 的成功證明了:
- 多模態融合的有效性:通過將視覺和語言信息深度融合,模型能夠從更豐富的語境中理解場景,從而做出更明智的駕駛決策。
- 協同優化:駕駛性能和語言理解能力并非相互獨立的,而是通過模型內部的協同優化機制相互促進。例如,對語言指令的精確理解可以幫助模型在模糊的視覺場景中做出更準確的判斷。
- 端到端學習的潛力:SimLingo 的高性能結果再次驗證了端到端學習在自動駕駛領域的巨大潛力,它能夠學習到比傳統模塊化系統更復雜、更魯棒的感知-決策-控制映射。
這些綜合性能指標有力地證明了 SimLingo 無需額外傳感器或獨立的模塊,就能夠執行復雜的端到端任務。它不僅在模擬環境中展現了接近人類駕駛員的駕駛能力,還在理解和遵循人類指令方面達到了令人印象深刻的水平,為未來自動駕駛系統向更高智能化、更強交互性方向發展提供了堅實的技術基礎。
6. 完整的開源生態系統
SimLingo 的一個顯著特點是其完全開源的特性,并擁有一個為研究人員和開發者提供全面支持的生態系統。這種開放性極大地促進了自動駕駛和多模態學習領域的研究進展,使得全球范圍內的學者和工程師能夠輕松地復現、擴展和改進 SimLingo 的工作。一個完善的開源生態系統對于推動技術創新、加速社區協作以及降低研究門檻至關重要。SimLingo 的開源生態系統主要包括以下幾個核心組成部分:
6.1 龐大的數據集
高質量、大規模的數據集是訓練高性能自動駕駛模型的基石。SimLingo 提供了超過 330 萬個樣本 的龐大數據集,這些數據主要來源于 CARLA 2.0 模擬環境。該數據集的豐富性和多樣性是其突出優勢,具體體現在:
- 高分辨率圖像:包含了大量的車輛前置攝像頭捕獲的高分辨率圖像,為模型提供了豐富的視覺感知信息。
- 可選激光雷達數據:雖然 SimLingo 強調純視覺,但數據集也提供了可選的激光雷達數據,這為研究人員探索多傳感器融合或進行對比實驗提供了便利。
- 對象注釋:詳細標注了場景中的各類對象,如其他車輛、行人、交通標志等,包括其類別、位置和姿態信息,有助于模型學習精確的目標檢測和跟蹤。
- 車輛狀態信息:包含了自車(ego-vehicle)的詳細狀態,如速度、加速度、航向角、轉向角等,這些信息對于模仿學習和行為預測至關重要。
- 問答對(Question-Answering Pairs):這是 SimLingo 數據集的一大特色,包含了大量與駕駛場景相關的自然語言問題及其對應的答案。這些問答對用于訓練模型的視覺問答能力,使其能夠理解并回答關于場景的語義問題。
- 思維鏈注釋(Chain-of-Thought Annotations):除了問答對,數據集還包含了模型在決策過程中生成的思維鏈注釋。這些注釋為模型的可解釋性研究提供了寶貴的數據,有助于理解模型的推理過程。
- 多個指令到動作的軌跡:針對相同的視覺輸入,數據集提供了多個與不同語言指令(如“左轉”、“直行”、“減速”)相對應的駕駛動作軌跡。這正是支持“動作想象”機制的關鍵數據,使得模型能夠學習根據語言指令進行條件性決策。
這個綜合性數據集為研究人員提供了前所未有的機會,可以深入研究視覺-語言-動作一體化模型的訓練、評估和改進,尤其是在模擬環境中探索復雜駕駛場景下的多模態交互。
6.2 現成的腳本和工具
為了方便研究人員和開發者使用,SimLingo 生態系統提供了一系列現成的腳本和工具,涵蓋了從數據收集到模型評估的整個流程:
- 數據收集腳本:提供了使用名為 PDM-lite 的基于規則的專家和 CARLA 工具生成自定義訓練數據的腳本。這使得用戶可以根據自己的需求擴展數據集,或在特定場景下生成更多數據。
- 語言注釋腳本:用于對駕駛數據進行語言注釋的工具,例如生成問答對和思維鏈注釋,這對于訓練模型的語言理解和可解釋性至關重要。
- 基于想象的增強腳本:支持“動作想象”機制的數據增強腳本,能夠為相同的視覺輸入生成多個與不同指令對應的動作軌跡,從而豐富訓練數據并提升模型的指令遵循能力。
- 模型訓練腳本:提供了用于訓練 SimLingo 模型的完整腳本,用戶可以根據自己的硬件條件和研究目標進行配置和運行。
- 閉環模擬中的評估工具:用于在 CARLA 閉環模擬環境中評估模型性能的工具,包括駕駛指標的計算和語言任務的評估,確保了評估結果的準確性和可復現性。
這些工具鏈極大地降低了研究門檻,使得研究人員可以專注于模型創新,而無需從頭開始構建整個實驗平臺。
6.3 預訓練模型與推理/評估工具
為了進一步加速研究和應用,SimLingo 項目于 2025 年 6 月發布了預訓練模型,并提供了相應的推理代碼和評估工具。這意味著用戶無需從頭訓練模型,可以直接加載預訓練權重進行推理或在自己的數據集上進行微調。預訓練模型的提供,使得:
- 復現性高:其他研究人員可以輕松復現論文中的結果,驗證模型的性能。
- 快速啟動:開發者可以快速將 SimLingo 集成到自己的項目中,進行概念驗證或開發新的應用。
- 促進遷移學習:預訓練模型可以作為基礎模型,通過遷移學習在新的駕駛場景或任務上進行微調,從而節省大量的計算資源和時間。
這些全面的開源資源共同構建了一個強大而活躍的生態系統,鼓勵了全球范圍內的協作和創新,使得 SimLingo 不僅僅是一個研究成果,更是一個推動自動駕駛和多模態 AI 發展的共享平臺。
7. SimLingo 的突出之處
SimLingo 作為自動駕駛領域的一個創新性模型,其獨特的設計和卓越的性能使其在眾多研究中脫穎而出。其突出之處不僅體現在技術層面的突破,更在于其對未來自動駕駛系統發展方向的深刻洞察。以下是 SimLingo 的幾個關鍵優勢:
7.1 具有成本效益的部署
傳統的 L5 級自動駕駛系統通常依賴于昂貴且復雜的傳感器套件,如高精度激光雷達、毫米波雷達、高分辨率攝像頭陣列以及慣性測量單元(IMU)等。這些傳感器的成本高昂,且在安裝、校準和維護方面都面臨巨大挑戰,這嚴重阻礙了自動駕駛技術的廣泛商業化和普及。SimLingo 通過僅依賴攝像頭作為主要感知輸入,成功地解決了這一核心問題。
- 降低硬件成本:攝像頭是所有傳感器中最經濟且易于集成的。SimLingo 純視覺的感知范式顯著降低了自動駕駛系統的硬件成本,使其更具商業可行性。
- 簡化系統復雜性:減少傳感器種類意味著更簡單的系統架構、更少的校準需求和更低的維護成本。這對于大規模部署和日常運營具有重要意義。
- 領先的基準駕駛性能:盡管僅使用攝像頭,SimLingo 依然在 CARLA Leaderboard 2.0 和 Bench2Drive 等權威基準測試中實現了領先的駕駛性能。這證明了在某些復雜場景下,純視覺方案在結合先進的視覺-語言模型后,其性能可以媲美甚至超越依賴多傳感器融合的系統。
這種成本效益的部署能力使得 SimLingo 成為未來自動駕駛技術走向大眾市場的有力競爭者,尤其是在共享出行、物流配送等對成本敏感的應用場景中。
7.2 可解釋性和信任
自動駕駛系統的“黑箱”特性一直是其商業化和公眾接受度的主要障礙。當系統做出決策時,用戶和監管機構往往難以理解其背后的邏輯,這引發了對安全性和可靠性的擔憂。SimLingo 通過引入思維鏈注釋機制,顯著提升了模型的可解釋性,從而增強了用戶對系統的信任。
- 決策過程的透明化:思維鏈注釋為模型的每個動作增加了一個“敘事層”,即模型會生成一段簡短的文本來解釋其當前的感知和決策。例如,當車輛減速時,模型可能會解釋為“前方有行人,正在減速”。這種透明度使得模型的內部工作原理不再是完全的黑箱。
- 促進調試與驗證:對于開發人員而言,這些注釋是寶貴的調試工具。當模型行為異常時,通過分析其思維鏈,可以快速定位問題是出在感知、推理還是控制環節,從而加速模型迭代和改進。在安全關鍵應用中,這種可解釋性對于模型的驗證和審計至關重要。
- 提升公眾信任:當自動駕駛車輛能夠解釋其行為時,公眾對其的信任度會顯著提高。這種信任是自動駕駛技術被廣泛接受和采納的關鍵。它有助于彌合人類與機器之間的認知鴻溝,使自動駕駛系統更像一個“合作者”而非一個不可預測的機器。
- 潛在的法規遵從性:隨著自動駕駛法規的不斷完善,對模型可解釋性的要求將成為強制性標準。SimLingo 的思維鏈注釋機制為滿足這些未來的法規要求提供了潛在的解決方案,有助于系統獲得必要的認證和許可。
7.3 準備好人類交互
SimLingo 在語言理解和指令遵循方面的強大能力,使其天然地適用于與人類進行無縫、自然的交互,從而為實現更高級別的人在環(Human-in-the-Loop)自動駕駛場景奠定了基礎。
- 問答能力:模型能夠回答關于駕駛場景的自然語言問題,這使得用戶可以像與人類副駕駛交流一樣,獲取實時的環境信息或決策依據。例如,用戶可以詢問“我們離目的地還有多遠?”或“前方路況如何?”。
- 指令遵循:SimLingo 能夠理解并執行復雜的口頭指令,如“靠邊停車”、“在下一個路口右轉”或“加速超車”。這種能力使得用戶可以通過語音命令直接控制車輛,極大地提升了操作的便捷性和直觀性。
- 適用于多種場景:
- 共享出行(Rideshare Cars):乘客可以通過語音指令調整行駛路線、停車位置或車輛行為,提升乘坐體驗。
- 協作車隊系統(Collaborative Fleet Systems):在物流或公共交通領域,操作員可以通過遠程指令或語音交互,對車隊中的車輛進行實時調度和控制。
- 情境輔助(Contextual Assistance):系統可以根據駕駛情境提供主動建議或警告,并根據用戶的反饋進行調整,例如在檢測到駕駛員疲勞時建議休息,并根據駕駛員的語音指令尋找最近的服務區。
這種以語言為核心的人機交互能力,使得 SimLingo 不僅僅是一個自動駕駛系統,更是一個能夠與人類進行智能對話和協作的具身智能體,為未來智能交通和人機共駕模式提供了新的可能性。
7.4 更廣泛的機器人框架
SimLingo 的核心架構和訓練范式——結合了視覺-語言訓練、動作想象和推理注釋——具有高度的通用性,使其不僅限于自動駕駛領域,還可以廣泛應用于其他機器人技術。
- 無人機(Drones):可以應用于無人機的自主導航、目標識別和任務執行。例如,通過語言指令控制無人機進行區域巡邏、目標跟蹤或物資投遞,并解釋其飛行路徑和決策。
- 家庭助理機器人(Home Assistant Robots):可以賦能家庭服務機器人,使其能夠理解復雜的家庭環境,執行多步驟的家務任務,并與家庭成員進行自然語言交互。例如,指令“請把客廳的垃圾倒掉”或“幫我拿一下桌上的書”。
- 工業自動化(Industrial Automation):在工廠和倉庫中,機器人可以通過視覺感知和語言指令,完成物料搬運、裝配、質量檢測等任務,并向操作員報告工作進度或異常情況。
- 具身智能體(Embodied AI Agents):SimLingo 的架構為開發更通用、更智能的具身 AI 代理提供了范例,這些代理能夠在物理世界中感知、理解、推理并行動,從而執行各種復雜任務。
這種跨領域的適用性表明,SimLingo 不僅僅是一個自動駕駛模型,更是一個通用的多模態具身智能體框架,其所提出的創新機制有望推動整個機器人學和人工智能領域的發展。
8. 未來發展方向與挑戰
盡管 SimLingo 在自動駕駛和多模態理解方面取得了顯著進展,但作為一項前沿技術,它仍然面臨一些挑戰,并擁有廣闊的未來發展空間。以下將詳細探討 SimLingo 的未來發展方向及其可能遇到的挑戰:
8.1 從模擬到現實世界的過渡
目前,SimLingo 的卓越性能主要在模擬環境(如 CARLA)中得到驗證。將模型從模擬環境成功部署到現實世界是自動駕駛領域面臨的最大挑戰之一,這涉及到“模擬到現實”(Sim-to-Real)的鴻溝問題。現實世界環境的復雜性遠超模擬器,具體體現在:
- 動態天氣條件:現實世界中存在各種極端天氣(如暴雨、大雪、濃霧),這些條件會嚴重影響攝像頭圖像質量,增加感知難度。模型需要具備在惡劣天氣下保持魯棒性的能力。
- 傳感器噪聲與故障:真實世界的攝像頭圖像可能存在噪聲、模糊、畸變等問題,甚至可能出現傳感器故障。模型需要對這些不完美輸入具有更強的適應性。
- 不可預測的代理行為:人類駕駛員、行人和騎行者的行為往往具有高度的隨機性和不可預測性,這使得模型的行為預測和決策更加困難。
- 長尾分布問題:現實世界中存在大量罕見但關鍵的“邊緣情況”(corner cases),這些情況在模擬器中難以完全覆蓋,需要模型具備強大的泛化能力和對未知情況的處理能力。
為了彌合這一鴻溝,未來的研究可以探索以下方向:
- 領域適應(Domain Adaptation):開發更有效的領域適應技術,使模型能夠將從模擬數據中學到的知識遷移到真實世界數據上。
- 真實世界數據增強:利用生成對抗網絡(GANs)或其他技術,對模擬數據進行真實感增強,或對真實世界數據進行多樣化處理。
- 混合訓練范式:結合模擬數據和少量真實世界數據進行訓練,以充分利用模擬環境的可控性和真實世界的復雜性。
8.2 思維鏈模塊的深化與應用
當前,SimLingo 的思維鏈注釋主要作為一種可解釋性工具,對模型的實際駕駛性能沒有顯著影響。然而,思維鏈作為一種中間表示,具有巨大的潛力,可以從解釋性工具發展成為決策的核心組成部分:
- 決策增強:未來的研究可以探索如何將思維鏈作為模型內部推理的顯式步驟,從而直接影響和優化駕駛決策。例如,通過對思維鏈進行優化或修正,來引導模型生成更安全、更合理的行為。
- 層次化推理:思維鏈可以支持更復雜的層次化推理,例如,先進行高層次的規劃(“我需要去目的地”),然后分解為中層次的子目標(“在下一個路口左轉”),再到低層次的動作(“減速,打左轉向燈”)。
- 與人類反饋的結合:通過允許人類對思維鏈進行修正或提供反饋,可以實現更高效的人機協作學習,從而不斷提升模型的推理能力和決策質量。
8.3 語言指令的豐富與自然化
目前 SimLingo 主要處理相對結構化的語言指令。為了實現更自然、更流暢的人機交互,未來的研究應關注:
- 現實世界語音與口語變體:模型需要能夠處理帶有口音、語速變化、背景噪聲以及非標準語法的人類語音指令。這需要更強大的語音識別和自然語言理解能力。
- 多輪對話與上下文理解:在真實交互中,指令往往是多輪對話的一部分,模型需要理解對話的上下文,而不僅僅是單一的指令。例如,用戶可能會說“去最近的加油站”,然后接著說“不,還是去超市吧”,模型需要能夠理解并切換目標。
- 情感與意圖識別:更高級的交互可能需要模型識別用戶的情感狀態或深層意圖,從而提供更個性化和人性化的服務。
8.4 倫理、安全與法規考量
隨著自動駕駛技術越來越接近實際部署,倫理、安全和法規問題變得尤為重要。SimLingo 的可解釋性特性為此提供了良好的基礎,但仍需進一步研究:
- 責任歸屬:在發生事故時,如何根據模型的決策過程(包括思維鏈注釋)來界定責任。
- 隱私保護:純視覺方案雖然成本低,但也涉及到大量圖像數據的收集和處理,如何確保用戶隱私不被侵犯。
- 公平性與偏見:確保模型在不同人群、不同環境下的表現公平,避免因訓練數據偏見導致的不公平或歧視性行為。
9. 結論
SimLingo 代表了自動駕駛領域的一個重要里程碑,它成功地實現了頂級自動駕駛性能、強大的語言理解能力以及語言與動作之間的清晰對齊,所有這些都集成在一個高效的純視覺框架中。這一成就不僅挑戰了傳統自動駕駛系統對多傳感器融合的依賴,也為未來智能交通系統的發展描繪了新的藍圖。
其核心創新——**動作想象(Action Dreaming)**機制,通過強制模型在相同視覺輸入下根據不同語言指令生成多樣化的動作軌跡,有效地解決了傳統模仿學習中語言指令被忽視的問題,極大地增強了模型的指令遵循能力和泛化性。同時,**思維鏈注釋(Chain-of-Thought Annotation)**的引入,為模型的決策過程提供了前所未有的透明度,雖然目前主要用于解釋,但其在調試、驗證和提升用戶信任方面的潛力巨大,并有望在未來成為模型決策的核心組成部分。
SimLingo 在 CARLA Leaderboard 2.0 和 Bench2Drive 等基準測試中取得的領先駕駛分數,以及在視覺問答和指令遵循任務中展現出的高準確率,充分證明了其多模態協同工作的強大能力。其完整的開源生態系統,包括大規模數據集、豐富的工具鏈和預訓練模型,為全球研究人員和開發者提供了寶貴的資源,極大地促進了相關領域的協作與創新。
展望未來,SimLingo 為自動駕駛技術向更具成本效益、更高可解釋性、更強人機交互能力的方向發展奠定了堅實基礎。盡管從模擬環境到現實世界的過渡、思維鏈的深化應用以及語言指令的自然化仍是需要克服的挑戰,但 SimLingo 所展現出的通用架構和創新機制,使其不僅在自動駕駛領域,在更廣泛的機器人技術(如無人機、家庭助理機器人和工業自動化)中也具有廣闊的應用前景。
總之,SimLingo 不僅僅是一個高性能的自動駕駛模型,更是一個具身智能體如何有效融合視覺、語言和動作的典范。它為實現真正智能、自主且與人類意圖高度對齊的未來交通系統提供了強大的技術支撐,并為人工智能在物理世界中的應用開辟了新的可能性。對于任何從事機器人代理、車輛自主性或交互式 AI 系統研究的學者和工程師而言,SimLingo 都是一個值得深入實驗、改編和擴展的優秀模型。
10. 代碼實現
SimLingo 的開源框架為實驗和學術研究提供了極大的便利。以下是其安裝和使用指南:
10.1 安裝
為了正確配置 SimLingo 的運行環境,需要將以下路徑添加到 ~/.bashrc 文件中的 PYTHONPATH 環境變量中。這確保了 Python 解釋器能夠找到 CARLA、Scenario Runner 和 Leaderboard 等組件所需的模塊。
export CARLA_ROOT=/path/to/CARLA/root
export WORK_DIR=/path/to/simlingo
export PYTHONPATH=$PYTHONPATH:${CARLA_ROOT}/PythonAPI/carla
export SCENARIO_RUNNER_ROOT=${WORK_DIR}/scenario_runner
export LEADERBOARD_ROOT=${WORK_DIR}/leaderboard
export PYTHONPATH="${CARLA_ROOT}/PythonAPI/carla/":"${SCENARIO_RUNNER_ROOT}":"${LEADERBOARD_ROOT}":${PYTHONPATH}
完成環境變量配置后,可以通過以下步驟克隆倉庫、設置 CARLA 并創建 Conda 環境:
git clone https://github.com/RenzKa/simlingo.git
cd simlingo
./setup_carla.sh
conda env create -f environment.yaml
conda activate simlingo
10.2 下載數據集
SimLingo 的作者已在 Huggingface 上提供了完整的數據集。該數據集包含了駕駛數據、視覺問答(VQA)數據、注釋以及用于動作想象(Dreamer)的標簽。用戶可以通過 git 和 gitLFS 工具下載整個數據集,這對于進行模型訓練和復現實驗至關重要:
# 克隆倉庫
git clone https://huggingface.co/datasets/RenzKa/simlingo
# 導航到目錄
cd simlingo
# 拉取 LFS 文件
git lfs pull
如果只需要下載數據集中的單個文件,也可以使用 wget 命令:
wget https://huggingface.co/datasets/RenzKa/simlingo/resolve/main/data/carla_2_0_vqa_train.json
10.3 收集數據集
對于希望生成自定義訓練數據的研究人員,SimLingo 提供了 collect_dataset_slurm.py 腳本。該腳本利用 PDM-Lite 專家(一個基于規則的駕駛控制器)和 CARLA 工具,幫助用戶在模擬環境中收集新的駕駛數據。這對于擴展數據集、探索特定場景或進行數據增強研究非常有用。
10.4 訓練模型
SimLingo 提供了 train_simlingo_seed1.sh 訓練 shell 腳本,用戶可以通過運行該腳本來重現論文中的實驗結果,或者根據自己的需求調整超參數以進行新的模型訓練。該腳本封裝了訓練過程的復雜性,使得用戶可以便捷地啟動訓練任務。
10.5 評估駕駛和語言
為了評估 SimLingo 在駕駛和語言任務上的性能,項目提供了專門的腳本。這些腳本能夠在 CARLA 模擬環境中運行訓練好的代理,并計算其駕駛指標,同時評估其在語言任務(如視覺問答和指令遵循)上的表現。這對于驗證模型的有效性和進行性能分析至關重要。
bash ./start_eval_simlingo.py --mode closed_loop
在 GPU 顯存受限的情況下,用戶可以在調用 CARLAUE4.sh bash 腳本時添加 --RenderOffScreen 標志。這將使得 CARLA 在離屏模式下渲染,從而減少顯存占用。作者提供的結果展示了 SimLingo 的強大潛力,其性能在多個方面都達到了行業領先水平。

)




)
)




)







)