基于 YOLOv11n 的無人機航拍小目標檢測算法
問題:無人機航拍圖像中小目標檢測面臨尺度變化大導致的檢測精度較低和推理速度較慢等
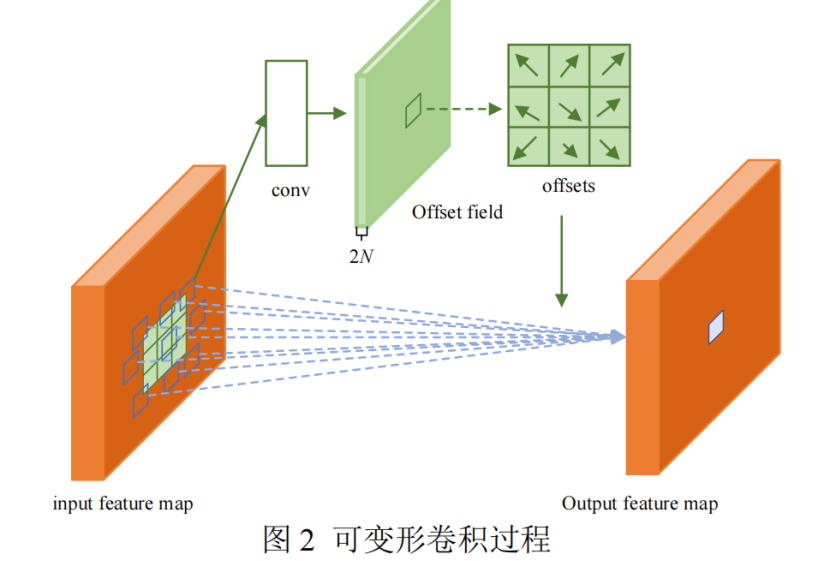
解決:在 C3k2 模塊中引入可變形卷積(DCN),增強模型在復雜背景下對
多尺度目標的特征提取能力,特別是對于形變顯著的小目標。其次,針對無人機航拍圖像中小目標占比較多等情形,新增 P2(Prediction
Layer 2)小目標檢測層并去除了 P5(Prediction Layer 5)大目標層,有效提高了小目標特征的捕獲精度,同時減少了大目標檢測層的
冗余計算。然后,提出了一種結合 Focal Loss 與 DIoU Loss 的 Focal-DIoU(Focal Loss and Distance-IoU Loss)損失函數,解決了小目
標檢測中的各目標類別不平衡問題,并優化了邊界框的定位精度。最后,采用 LAMP 剪枝方法對模型進行輕量化處理,主要通過適當
調整剪枝加速比,自適應地按層評估并刪除冗余連接,減少模型整體計算量并加速推理過程。
結果:文章所提 YOLOv11n-DPD 算法通過引
入可變形卷積、優化小目標檢測層結構、改進損失函數和進行模型剪枝,提高了檢測精度、加速了推理過程并優化了模型大小,與現
有的小目標檢測方法相比表現更優,尤其適用于無人機航拍小目標檢測任務和嵌入式平臺的部署推理。
可變卷積過程
每個部分增加個偏移量
蛇形卷積
:數據變形金剛,想變什么變什么)

![[Android] UI進階筆記:從 Toolbar 到可折疊標題欄的完整實戰](http://pic.xiahunao.cn/[Android] UI進階筆記:從 Toolbar 到可折疊標題欄的完整實戰)
)
)



:如何提升服務器硬件電路中的性能?如何強化穩定性?)









)