隨著自動駕駛技術的迅速發展,車道線檢測與跟蹤技術在提高道路安全性和駕駛自動化水平方面發揮著至關重要的作用。本文針對基于機器視覺的車道線檢測與跟蹤關鍵技術進行了深入研究,旨在提升車道線檢測的準確性與系統的實時響應能力。通過采用先進的深度學習模型和圖像處理技術,本研究設計并實現了一種高效的車道線檢測與跟蹤系統。
在系統實現方面,首先采用改進的UNET_SERESNEXT101模型,結合深度卷積網絡,對車道線特征進行有效學習和提取。通過引入加權損失函數優化訓練過程,并利用多尺度特征融合技術增強模型對復雜交通場景的適應性。此外,本系統還融合了圖像語義分割技術,利用DistributedDataParallel (DDP)框架提高了模型的訓練效率,確保了檢測系統在多種駕駛環境下的魯棒性和準確性。
實驗部分,本研究構建了一個包含多種駕駛條件和環境的車道線檢測數據集,使用MyDataset進行數據加載并通過DataLoader進行高效管理。實驗結果表明,所提出的模型在保證實時性的同時,相較于現有技術在檢測準確率上有顯著提升。同時,采用模型指數移動平均(ModelEMA)和策略性學習率調整(PolyWarmup)進一步優化了模型性能。
總結而言,本文提出的車道線檢測與跟蹤系統基于深度學習和機器視覺技術,有效解決了車道線檢測在復雜環境下的準確性和實時性問題,為自動駕駛領域提供了一種可靠的技術支持。未來研究將探索更多的模型優化方向和實時處理策略,以應對更廣泛的應用場景和更高的安全要求。
關 鍵 詞:車道線檢測;自動駕駛;機器視覺;深度學習;圖像處理;模型優化;實時性能;數據集
ABSTRACT
With the rapid development of autonomous driving technology, lane detection and tracking technology plays a crucial role in improving road safety and driving automation level. This article conducts in-depth research on key technologies for lane detection and tracking based on machine vision, aiming to improve the accuracy of lane detection and the real-time response ability of the system. By adopting advanced deep learning models and image processing techniques, this study designs and implements an efficient lane detection and tracking system.
In terms of system implementation, the improved UNETSERESNEXT101 model is first adopted, combined with deep convolutional networks, to effectively learn and extract lane line features. By introducing a weighted loss function to optimize the training process and utilizing multi-scale feature fusion technology to enhance the model's adaptability to complex traffic scenes. In addition, this system also integrates image semantic segmentation technology and utilizes the Distributed Data Parallel (DDP) framework to improve the training efficiency of the model, ensuring the robustness and accuracy of the detection system in various driving environments.
In the experimental section, this study constructed a lane detection dataset containing multiple driving conditions and environments, loaded the data using MyDataset, and efficiently managed it through DataLoader. The experimental results show that the proposed model significantly improves detection accuracy compared to existing technologies while ensuring real-time performance. Meanwhile, the performance of the model was further optimized by using Model Exponential Moving Average (ModelEMA) and Strategic Learning Rate Adjustment (PolyWarmup).
In summary, the lane detection and tracking system proposed in this article is based on deep learning and machine vision technology, effectively solving the accuracy and real-time issues of lane detection in complex environments, and providing a reliable technical support for the field of autonomous driving. Future research will explore more directions for model optimization and real-time processing strategies to address a wider range of application scenarios and higher security requirements.
KEY?WORDS: Lane detection; Autonomous driving; Machine vision; Deep learning; Image processing; Model optimization; Real time performance; data set
目 ?錄
1 緒論
1.1 研究背景和意義
1.2 研究現狀
1.3 系統設計思路
1.4 設計方法
2 相關技術介紹
2.1 卷積神經網絡
2.2 GPU訓練數據
2.3 Python技術
2.4 Pycharm開發工具
3 系統需求分析
3.1 功能需求分析
3.2 非功能需求分析
3.3 可行性分析
3.3.1 時間可行性
3.3.2 經濟可行性
3.3.3 技術可行性
3.4 系統業務流程
4 系統設計
4.1 模型訓練
4.2 硬軟件環境
4.3 數據集
5 系統實現
5.1 車道線檢測的實現
5.2 結果與分析
6 結論
參考文獻
致 ?謝
在現代交通系統中,確保道路安全和提高駕駛效率是至關重要的。隨著智能交通系統的快速發展,車道線檢測與跟蹤技術成為自動駕駛和輔助駕駛系統中的核心組成部分[1]。車道線是道路交通標記的重要元素,提供了駕駛路徑的關鍵視覺信息,對于保持車輛在車道中行駛和防止交通事故起著決定性作用。因此,提高車道線檢測與跟蹤的準確性和可靠性,對于實現全自動駕駛技術具有重大的研究和實際意義。
傳統的車道線檢測技術主要基于簡單的圖像處理方法,如邊緣檢測和幾何模型擬合,這些方法在高光、陰影或道路磨損情況下容易失效[2]。隨著深度學習技術的興起,基于機器視覺的方法展示出對復雜場景的高適應性和優越的性能。通過訓練深度神經網絡,可以有效識別和跟蹤在不同光照、氣象條件下的車道線,極大提高系統的魯棒性。
然而,實時性是車道線檢測系統設計中的另一大挑戰。為了適應高速行駛的需求,檢測系統必須能夠在極短的時間內準確響應,這要求算法不僅要有高準確率,還需要有快速的處理速度[3]。此外,系統還應具備良好的普適性,能夠在全球不同的道路條件和交通規則下有效工作。
因此,本研究旨在通過利用先進的機器視覺和深度學習技術,開發一套高效、準確、魯棒的車道線檢測與跟蹤系統,以推動自動駕駛技術的實際應用,為智能交通系統的發展做出貢獻。這將不僅提升道路安全,減少交通事故,還將為未來交通系統的智能化和自動化開辟新的可能。
車道線檢測與跟蹤技術是智能交通系統和自動駕駛車輛領域的重要研究課題。過去幾年中,國內外許多研究機構和企業都在此領域取得了顯著進展。
在國際上,谷歌的Waymo和特斯拉都是自動駕駛技術的先驅,他們在車道線檢測與跟蹤技術上投入了大量的研發資源。特斯拉的Autopilot系統使用了先進的圖像識別技術,結合深度學習,不僅可以識別車道線,還能在復雜的交通環境中實現準確的車道保持[5]。此外,Mobileye,一家以色列公司,也在這一領域領先全球,他們開發的視覺感知技術被多家汽車制造商采用,用于提高車輛的安全性和導航能力。
在國內,百度Apollo項目也在車道線檢測技術上取得了突破。Apollo平臺采用基于深度學習的多傳感器融合方法,能夠實時準確地進行車道線定位和追蹤,即使在夜間或惡劣天氣條件下也能保持高性能。同濟大學的自動駕駛實驗室也進行了相關研究,他們開發的基于機器視覺的車道線檢測系統能夠適應中國復雜的道路和交通狀況,顯著提高了檢測的準確率和系統的穩定性[6]。
此外,哈爾濱工業大學的研究團隊提出了一種結合圖像分割和深度卷積網絡的方法,有效提升了車道線檢測的準確性和適應不同光照條件的能力。該研究成果已在多個國際知名期刊上發表,得到了國際同行的認可。
盡管車道線檢測技術已經取得了顯著的進展,但在處理極端天氣條件、適應不同地理環境和文化差異方面仍面臨挑戰[7]。未來的研究需要進一步提高算法的魯棒性和適應性,同時降低系統的成本,使其更加普及。隨著人工智能技術的不斷進步,預期這些技術問題將得到有效解決。
在設計基于機器視覺的車道線檢測與跟蹤系統時,遵循了以下四項核心思路來確保系統的高效性、準確性、穩定性和實用性:
- 深度學習模型的應用:
為了實現高準確率的車道線檢測,系統采用了基于深度學習的圖像識別技術。選擇了卷積神經網絡(CNN)作為主要的算法框架,由于其在圖像處理領域表現出的卓越能力,特別是在特征提取和模式識別方面。通過訓練包含多種道路和光照條件下的數據集,使模型能夠識別并跟蹤不同環境下的車道線。
- 多傳感器數據融合:
考慮到僅依靠單一攝像頭輸入的局限性,系統設計集成了多種傳感器數據,如雷達和激光雷達(LiDAR),以提高檢測的魯棒性。通過融合這些傳感器提供的多維度數據,系統能夠更準確地進行車道線定位,特別是在視覺信息不足或受阻的情況下。
- 實時性能優化:
車道線檢測系統需要在毫秒級響應時間內準確地輸出結果以符合自動駕駛的需求。因此,在系統設計中特別注重優化計算流程和算法效率。采用了模型壓縮和硬件加速技術,如使用GPU進行并行處理,以確保系統能夠快速處理輸入的視頻流并即時反饋車道線狀態。
- 用戶交互與反饋機制:
為了使系統更加用戶友好并增強實用性,設計了直觀的用戶界面,允許操作者輕松設定參數并監視系統狀態。此外,系統還包括了一個反饋機制,能夠根據實際駕駛情況自動調整檢測參數,如校正檢測閾值和優化跟蹤算法,從而提高系統適應不同駕駛環境的能力。
通過這些設計思路的實施,期望該車道線檢測與跟蹤系統不僅能夠提供高準確率的檢測結果,同時也能滿足實時性和靈活性的需求,為自動駕駛車輛在復雜交通環境中的安全運行提供堅實的技術支持。
在撰寫關于基于機器視覺的車道線檢測與跟蹤技術的研究論文過程中,采用合適的研究方法對于確保論文質量和科學性至關重要。以下是本文所采用的幾種關鍵研究方法:
文獻綜述:文獻綜述為研究提供了堅實的理論基礎和背景知識。計算機視覺領域,尤其是車道線檢測與跟蹤,已經經歷了眾多發展階段,各個階段都積累了豐富的研究成果和技術更新。通過對歷史和現存文獻的全面回顧,可以把握領域內的發展脈絡,避免重復研究,同時借鑒先進的理論和技術以指導自己的實驗設計。
比較分析法:通過比較分析法,本研究明確了當前系統與市場上主流車道線檢測系統之間的差異和潛在優勢。通過深入分析不同系統的設計架構、功能實現與性能表現,可以識別本系統的短板和優勢,進而針對性地進行優化和提升。
實地調查法:為了確保研究成果的實際應用價值和系統設計的用戶友好性,采用實地調查法來收集目標用戶群的反饋和需求是非常必要的。通過調查潛在用戶的使用習慣、偏好及功能需求,可以在系統設計初期就將用戶的聲音融入產品開發中,確保最終產品能夠更好地服務于實際用戶。
這些研究方法不僅加深了對車道線檢測與跟蹤技術的理解,而且提高了研究的實用性和科學性,確保研究成果能夠有效地支持自動駕駛技術的發展,為相關領域提供有力的技術支撐。
CNN的核心在于其能夠自動、有效地從圖像中提取特征。這一能力歸功于網絡的多層結構,包括卷積層、池化層和全連接層。卷積層通過濾波器對圖像進行卷積操作,提取出圖像的局部特征;池化層(如最大池化)則用于降低特征維度,增強網絡對圖像變換的不變性;全連接層則負責將學到的“高級”特征映射到最終的輸出,如車道線的位置。
在車道線檢測任務中,CNN能夠從原始的道路圖像中直接學習到有用的特征表示,無需手動設計圖像處理算法。此外,通過深層網絡,CNN可以學習到從簡單到復雜的多級特征,這對于處理在復雜背景下的車道線檢測尤為重要。現代的車道線檢測系統常采用如UNet、SegNet等改進的CNN架構,這些網絡通過特殊設計增強了對圖像中車道線位置的精確識別,極大提升了檢測的準確性和系統的實用性。
總之,卷積神經網絡在車道線檢測與跟蹤的研究中扮演著關鍵角色,其強大的特征提取能力和適應性使其成為該領域內不可或缺的技術之一。
基于PyTorch框架的深度學習訓練過程,特別是針對使用多GPU環境下的分布式訓練(DDP, DistributedDataParallel)。這一實現首先涉及設置環境變量以確定訓練是否在分布式環境中執行,通過LOCAL_RANK、RANK和WORLD_SIZE變量控制GPU的分配與任務分發。
在SegTrainer類的初始化中,系統根據是否使用CUDA以及是否在多GPU環境中決定是否將模型封裝在DDP中。如果啟用了同步批歸一化(sync_bn),模型會轉換為同步批歸一化模式以保持各設備間批歸一化參數的一致性。
訓練過程中,根據交叉驗證的設置(可選的折數kfolds_number),數據被劃分為訓練集和驗證集。訓練集和驗證集各自加載到對應的DataLoader中,以便進行批處理。UNET_SERESNEXT101模型用于車道線檢測任務,與一個特定的優化器和學習率調度器(采用PolyWarmup策略)一起配置。此外,使用了混合精度訓練來優化性能和內存使用。
總結而言,這一GPU訓練框架利用了現代深度學習工具和技術來高效地訓練復雜的網絡模型,提升了訓練的速度和效率,同時確保了在多GPU環境中的可擴展性和穩定性。
Python是一種高級編程語言,以其簡潔的語法和強大的庫支持在科學計算、數據分析和機器學習領域中廣受歡迎。對于基于機器視覺的車道線檢測與跟蹤技術研究,Python提供了一系列優秀的庫,如NumPy、Pandas進行數據處理,Matplotlib進行數據可視化,以及TensorFlow、PyTorch等深度學習框架進行復雜的圖像處理和模型訓練。
在車道線檢測與跟蹤項目中,Python允許研究人員利用OpenCV庫進行高效的圖像處理操作,如圖像裁剪、色彩轉換、濾波和邊緣檢測等。這些操作是提取用于車道線識別的關鍵特征的基礎。此外,PyTorch和TensorFlow等庫提供的深度學習功能使研究人員能夠設計、訓練和部署復雜的卷積神經網絡,這些網絡能夠從道路圖像中學習到判別車道線的有效特征。
Python的跨平臺性和龐大的開發社區也為車道線檢測技術的研發提供了極大的便利。研究人員可以通過社區分享的資源和經驗,快速解決開發中遇到的問題,并持續獲得關于最新工具和技術的更新。這使Python成為開展此類研究的理想選擇,可以加速從理論探索到實際應用的轉化過程。
PyCharm 是由 JetBrains 開發的一款強大的 Python 集成開發環境(IDE),廣泛應用于各種 Python 項目,包括機器視覺和深度學習應用。對于進行基于機器視覺的車道線檢測與跟蹤的研究,PyCharm 提供了一套完整的工具和功能,極大地提升開發效率和代碼質量。
首先,PyCharm 提供了代碼編輯、調試和優化的高級功能,如代碼自動完成、項目導航、智能錯誤檢測和一鍵式代碼修復建議,這些功能使得編寫和維護復雜的圖像處理和機器學習代碼變得更加高效和直觀。其內置的代碼分析和重構工具可以幫助開發者優化代碼結構,提高代碼的可讀性和可維護性。
此外,PyCharm 支持直接集成多種科學包和框架,如 NumPy、SciPy、Matplotlib、Pandas、TensorFlow 和 PyTorch,允許研究人員在同一環境中開發、測試和部署機器視覺模型。它的虛擬環境管理工具也非常方便,可以幫助開發者在隔離的環境中管理不同的依賴和庫版本,避免了版本沖突問題。
PyCharm 還提供了版本控制系統的完整集成,支持 Git、Subversion、Mercurial 等,這對于團隊協作和代碼版本管理至關重要。通過這些集成的版本控制工具,團隊成員可以輕松地共享工作進度并追蹤代碼變更。
綜上所述,PyCharm 作為一款專業的 Python IDE,其全面的開發支持和豐富的功能,特別適合用于復雜的機器視覺項目,如車道線檢測與跟蹤,大大提升了開發的效率和項目的成功率。
在基于機器視覺的車道線檢測與跟蹤系統的研究中,功能需求分析是確保系統設計滿足預期目標的關鍵步驟。以下是系統設計中考慮的四項主要功能需求:
- 高精度的車道線檢測能力:
系統必須能夠在各種環境條件下(如不同光照、天氣狀況和道路類型)準確檢測車道線。這要求系統具備強大的圖像處理能力,能夠從復雜背景中準確分辨出車道線,同時對于斷裂或部分遮擋的車道線也能進行有效的識別和重建。
- 實時跟蹤和響應:
考慮到車輛行駛的動態性,系統應具備快速響應能力,能夠實時跟蹤車道線的變化,并即時更新檢測結果。這要求系統具有較高的處理速度和低延遲,以支持車輛在高速行駛時的安全駕駛需求。
- 魯棒性:
系統需要對各種干擾因素具有較強的抵抗力,包括光線反射、陰影、路面磨損和臨時覆蓋物等。魯棒性的增強可以通過改進算法和增加環境適應性調整來實現,確保在多變的道路環境中依然能夠穩定運作。
- 用戶交互與反饋機制:
車道線檢測系統應提供直觀的用戶界面,讓操作者能夠輕松設置參數、監控系統狀態及查看檢測結果。此外,系統應具備反饋機制,允許用戶報告問題和建議,系統根據這些輸入進行自我優化和調整,以不斷提升系統性能和用戶滿意度。
通過上述功能需求的詳盡分析和實施,可以確保車道線檢測與跟蹤系統在提供高效、準確服務的同時,也能適應不同用戶和環境的需求,為智能駕駛技術的發展做出貢獻。
在基于機器視覺的車道線檢測與跟蹤系統的開發中,除了滿足特定的功能需求外,非功能需求同樣扮演著至關重要的角色。以下是系統設計中必須考慮的四項主要非功能需求:
- 系統性能:
系統必須具備高性能處理能力,能夠在極短的時間內處理大量的圖像數據,并實時輸出檢測結果。這要求后端處理必須優化,以減少任何可能的延遲,確保在實際駕駛過程中的連續性和實時性。
- 可擴展性:
隨著技術的發展和需求的變化,系統應能支持后續的升級和擴展。這包括能夠集成新的技術和算法,以及擴展到更多的硬件和軟件平臺上。可擴展性確保了系統的長期有效性和適應未來技術變革的能力。
- 安全性:
系統必須確保所有數據的安全,特別是用戶的輸入和系統的輸出數據。應采取適當的加密和安全措施,防止數據泄露或被未授權訪問。同時,系統還需要有能力檢測和防御可能的安全威脅,如入侵嘗試或數據篡改。
- 維護性和可測試性:
系統的代碼應該易于維護和升級,且應當具備高可測試性。開發過程中要采用模塊化的設計,并編寫清晰的文檔和注釋,使得其他開發者可以輕松理解和維護代碼。同時,應該提供全面的測試框架來持續驗證系統功能和性能,確保在任何更新后系統依然穩定運行。
通過對這些非功能需求的深入分析和妥善實施,可以大大提升系統的整體質量和用戶滿意度,確保車道線檢測與跟蹤系統在實際應用中的穩定性和可靠性。
在進行基于機器視覺的車道線檢測與跟蹤技術的研究時,時間可行性分析是關鍵因素之一。當前,深度學習和計算機視覺技術已相當成熟,提供了強大的工具和庫,PyTorch,這些工具可以加速開發流程和實驗周期。結合現有的高性能計算資源和GPU加速能力,項目的核心技術開發和測試階段預計能夠在合理的時間框架內完成。然而,系統的細化優化和現場實施可能需要額外時間,尤其是在多種交通環境下的廣泛測試。綜合考慮,項目預計能夠在預定的研究周期內達到初步的研究目標,但推向商業化應用可能需要更長時間進行迭代和改進。
對于基于機器視覺的車道線檢測與跟蹤系統的經濟可行性分析來說,雖然初期投資包括高性能計算資源、開發軟件許可及人員成本可能較高,但隨著技術的普及和成本的逐步降低,長期看這種技術具有經濟效益。此外,該技術的實施可以顯著提高道路安全,減少交通事故,從而降低因交通事故帶來的經濟損失和社會成本。同時,隨著自動駕駛車輛的逐漸普及,市場對于高效可靠的車道線檢測技術的需求日益增加,預期將帶來較大的市場回報。因此,從長期和廣泛應用的角度來看,投資此項技術是經濟上可行的。
基于機器視覺的車道線檢測與跟蹤技術的技術可行性較高。隨著計算機視覺和人工智能領域的迅速發展,已經有許多成熟的算法和模型,如卷積神經網絡(CNN),能夠有效處理圖像識別和分析任務。此外,現有的技術基礎設施,包括高性能GPU和大規模數據處理能力,為實現復雜的圖像處理提供了必要的硬件支持。在軟件方面,開源框架PyTorch提供了強大的工具,可以加速開發和部署過程。因此,從技術實現的角度來看,部署一個高效的車道線檢測與跟蹤系統是完全可行的。
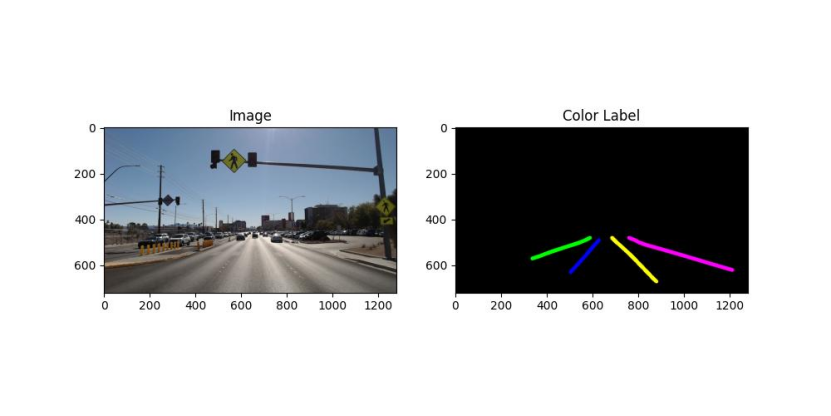
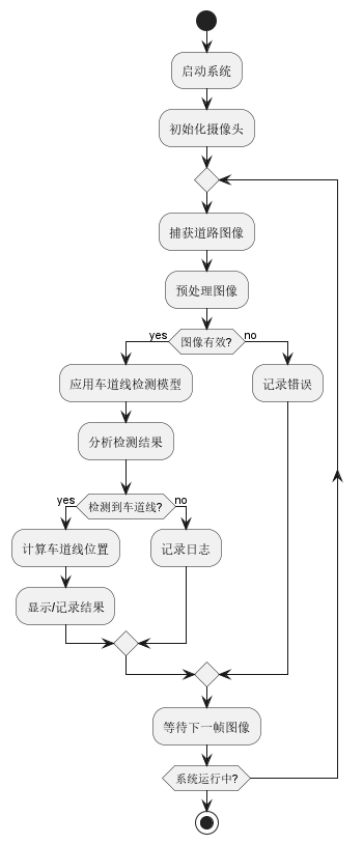
在基于機器視覺的車道線檢測與跟蹤系統中,整個業務流程旨在實現高效且精確的車道標識識別,以輔助或實現自動駕駛功能。此系統通過連續捕獲道路圖像并對其進行分析,確保實時性和準確性的同時,也能適應不同的道路和光照條件。
流程開始于系統的初始化,這包括啟動攝像頭和配置相關參數,確保能夠清晰地捕捉到道路圖像。隨后,系統對捕獲的圖像進行預處理,這一步驟對于后續的圖像分析至關重要,因為它直接影響到檢測模型的輸入質量和最終結果的可靠性。
通過深度學習模型對預處理后的圖像進行車道線檢測,模型會輸出車道線的位置信息。系統需要分析這些信息,驗證檢測結果的準確性,并據此進行適當的響應,如調整車輛行駛方向或提醒駕駛員。如果模型未能檢測到車道線或檢測結果不準確,系統將記錄這一事件,供后續分析和模型優化使用。
整個業務流程的設計考慮了系統的實用性和可靠性,確保在實際道路條件下能夠有效地輔助駕駛,從而提升行車安全。業務流程圖如下:




)


上的適配探索與實踐)






JavaScript 基礎知識)
(二))



