?? 引言:低空經濟起飛,智能視覺鏈路成剛需基建
隨著政策逐步開放與技術加速成熟,低空經濟正從概念走向全面起飛。從載人 eVTOL 到物流無人機,從空中巡檢機器人到城市立體交通調度平臺,低空場景正在成為繼地面交通和移動互聯網之后的第三空間基礎設施。
據工信部和民航局預測,到 2030 年我國低空經濟年產值將突破萬億元,覆蓋 電力巡檢、應急響應、城市安防、農業遙感、物流配送、邊境巡控等多個高頻場景。然而,在這一系列場景中,除了飛行器本體之外,另一個關鍵能力正逐漸成為“成敗分水嶺”:

? 那就是——低延遲、穩定、智能可控的視頻感知鏈路。
📡 為什么“視頻鏈路”是低空系統的剛需?
-
無人系統不再靠人操作,而靠“看”與“判斷”。
飛行器必須具備視覺認知能力,從而完成避障、識別、定位、跟蹤等任務。 -
指揮控制系統必須“看得見”才能“控得準”。
無人機編隊協作、城市低空交通調度等都依賴于畫面流的實時同步與場景判斷。 -
AI智能模型依賴高質量、低延遲的視頻輸入。
無論是邊緣推理還是云端分析,視頻都是最關鍵的輸入源。
🎯 視頻不再只是“看”,更是“算”“控”“判”的信息基礎
在傳統視頻系統中,“看清畫面”足矣;而在低空經濟中,“畫面是否同步”“延遲是否可控”“能否幀級接入AI識別”才是真正的核心指標。這就要求:
-
更低的傳輸時延(<200ms)
-
更強的跨平臺部署適應能力
-
更開放的數據回調與解碼接口
-
更高的抗網絡抖動穩定性
這些,恰恰是傳統播放器、通用流媒體方案難以勝任的。
在這樣的背景下,一套能夠穩定支撐“空中到地面”、“實時感知到智能響應”的端到端視頻鏈路基礎設施,已成為低空經濟從可飛行到可調度、可協作、可智能的關鍵基石。
📌 這正是大牛直播SDK切入這一新興產業的價值所在 —— 它不僅是一套播放器,更是一套可嵌入、可拓展、可演化的低空智能視覺通道系統內核。
🎯 場景挑戰:低空經濟中的視覺鏈路難題全景圖
低空經濟的快速發展正推動大量無人化飛行器進入城市、農村、海洋等復雜空域。這些飛行終端已不再是簡單的“飛行平臺”,而是承載智能感知、遠程控制、協同作業的空中節點。
在這些實際應用中,“視頻鏈路”不僅僅用于監看畫面,它必須成為整個系統中實時決策、任務執行、智能交互的關鍵輸入源。然而,當這一鏈路真正走向工業級部署時,工程上遇到的挑戰遠比“播放成功”復雜得多:
Android平臺Unity共享紋理模式RTMP播放延遲測試
1?? 延遲不可控:響應失時,任務精度下降
應用背景:
-
城市避障、目標識別等任務要求視頻延遲 <150ms;
-
多無人機協同飛行時,畫面同步需控制在幀級差異;
-
指揮控制系統依賴視頻進行決策反饋,任何響應滯后都可能導致操作偏差。
技術挑戰:
-
傳統播放器為“穩定播放”而設計,默認緩沖延遲在 500ms~3s;
-
CDN、HTTP傳輸路徑引入多層不可控延遲;
-
編碼端缺乏靈活 GOP / I幀控制,導致首幀拉起慢、解碼等待長。
2?? 弱網多變:丟幀/卡頓頻發,鏈路不穩定
應用背景:
-
無人機作業常位于山區、海域、林區,移動信號不連續;
-
城市樓宇間干擾嚴重,5G 回落現象頻繁,視頻中斷風險大。
技術挑戰:
-
TCP 傳輸一旦丟包需重傳,出現“延遲疊加”效應;
-
開源播放器缺乏丟幀重組、動態自適應能力;
-
無斷點續流機制,導致“卡頓即中斷”。
3?? 平臺異構:多端部署,統一集成困難
應用背景:
-
飛行端通常為嵌入式 Linux,控制端可能是 Android,中心系統為 Windows 或 Linux;
-
同一系統需適配手機控制、PC調度、Web平臺展示、Unity三維引擎渲染;
-
AI識別模塊獨立運行于邊緣GPU主機,需接入原始幀流。
技術挑戰:
-
大多數播放器為單平臺構建,接口風格各異;
-
缺乏統一的播放控制、幀回調、渲染抽象機制;
-
開發者需針對每個平臺重復實現流媒體集成邏輯,工程復雜度高。
4?? 數據不可用:畫面看得見,但不能被“AI使用”
應用背景:
-
目標檢測、行為識別、異常分析等 AI 模塊需實時獲取 YUV/RGB 幀輸入;
-
分布式 AI 模塊需接收時間戳對齊的視頻數據進行融合推理;
-
某些業務希望將畫面與識別結果同時展示、記錄與決策反饋。
技術挑戰:
-
多數播放器無法暴露解碼后的視頻幀(僅提供渲染);
-
缺乏統一幀回調接口和時間戳輸出,難以與模型做“時序對齊”;
-
視頻鏈路與 AI 模塊割裂,無法形成一體化閉環。
5?? 控制閉環斷裂:不能“看即判”“判即控”
應用背景:
-
巡檢型無人機需邊看邊識別,邊識別邊發控指令;
-
大型系統中需支持多路切流、多任務調度、畫面聯動響應;
-
地面站與飛行端之間必須形成“任務事件驅動 + 視頻反饋”鏈路。
技術挑戰:
-
通用播放器無法暴露控制層接口,不能響應任務事件;
-
多流拉取/切換不具備同步控制機制,無法快速切畫面、鎖目標;
-
視頻鏈路“只出不入”,無法參與系統級協同。
📌 小結:這些問題不是“技術細節”,而是“系統瓶頸”
傳統視頻鏈路方案(如 HLS + HTML5、CDN 分發 + 媒體播放器)設計初衷是為延遲不敏感、播放為主的內容消費場景服務。面對低空經濟的以下新特征,它們顯得力不從心:
-
?? 對毫秒級時延的敏感性;
-
📶 對弱網適應能力的要求;
-
🧠 對 AI 可用性與可控性的依賴;
-
🧩 對多平臺、多任務集成的需求。
這些挑戰,不僅暴露了傳統方案的“播放導向”局限,也明確了低空經濟呼喚新型視頻鏈路基礎設施的迫切性。
? 視頻鏈路,必須進化為“智能協同的核心能力”,而不是“視覺展示的附屬組件”。
?
🚀 解決方案:用大牛直播SDK構建低空智能系統中的視頻基礎設施
在經歷了從“看得見”到“控得動”、再到“判得準”的進化后,低空經濟下的飛行終端正逐步成為空中的智能節點。而與之配套的,必須是一條端到端的可控制、可感知、可集成的視頻數據鏈路。
Android平臺RTSP播放器時延測試
Android平臺RTMP直播播放器延遲測試
傳統播放器無法勝任的核心原因,在于其本質上為內容消費而生。要解決低空任務中的種種痛點,必須從鏈路底層重新設計,構建具備以下能力的視頻系統:
? 1. 架構理念:從“播放器”轉向“智能視覺通道組件”
大牛直播SDK的設計原則不是“兼容所有格式”,而是為工程系統構建穩定可控的實時視覺通路:
-
解耦傳統緩沖模型,支持“關鍵幀即播 / 收幀即解 / 渲染直通”;
-
原生暴露解碼后 YUV / RGB 數據,可對接 AI 模型、同步控制系統;
-
封裝統一播放內核 API,支持 Android / iOS / Windows / Linux / Unity 多平臺統一部署;
-
提供主動控制接口(幀控制、時間戳同步、切流控制),支持系統級聯動。
這不再是“播放器”,而是一個“支持智能任務控制的視頻數據基礎組件”。
🔧 2. 系統架構設計:適配多類型無人終端與地面系統
大牛直播SDK可靈活嵌入各類飛行器、邊緣盒子、地面控制站、云指揮系統中,構建從空中采集到智能感知的閉環鏈路:
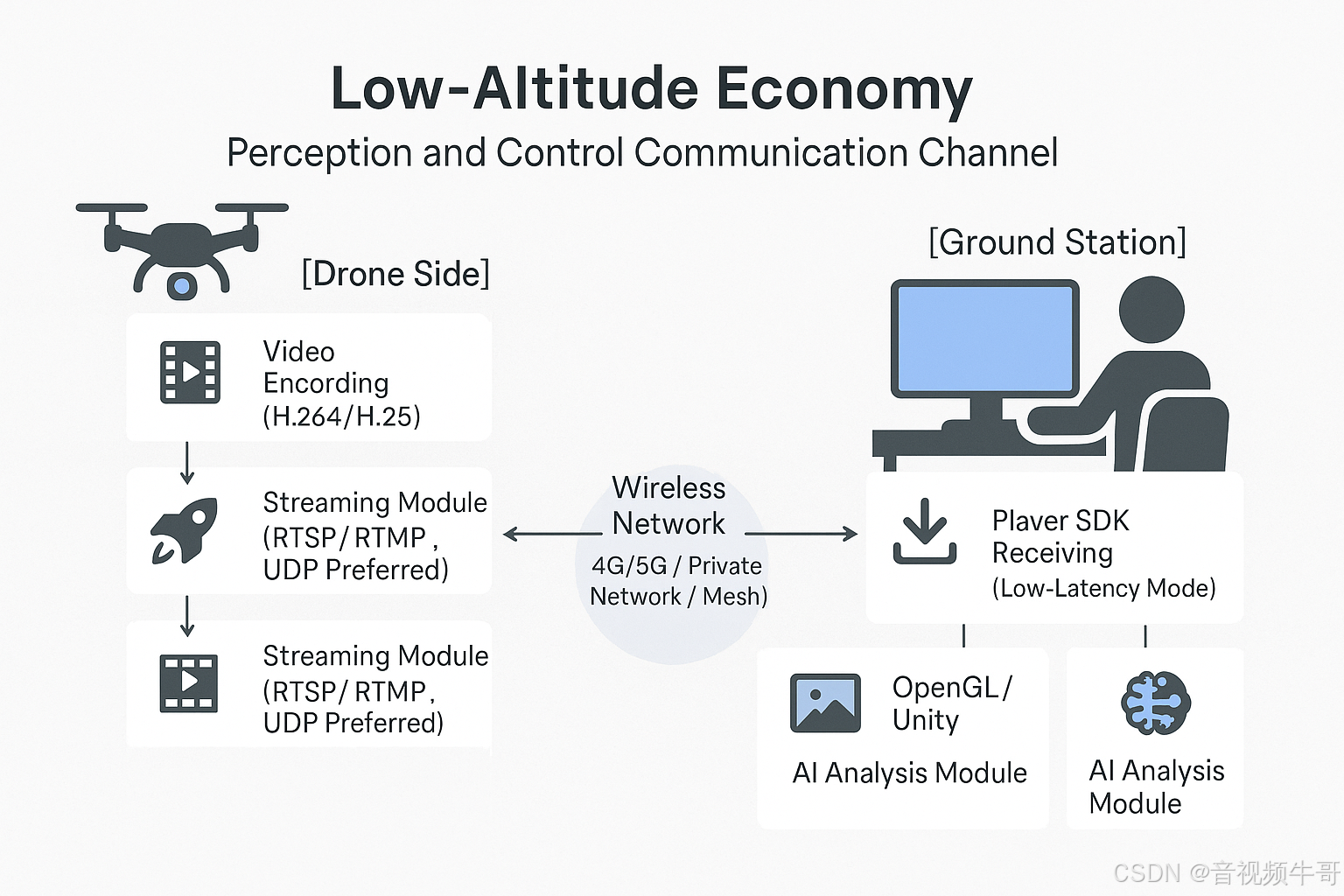
📡 端到端系統鏈路結構:
【飛行端】
📷 攝像頭采集
↓
🎞 編碼模塊(H.264/H.265)
↓
🚀 大牛SDK推流組件(RTSP/RTMP)
↓
📶 網絡(UDP / TCP / 自組網 / 5G)【邊緣/控制端】
📥 大牛SDK播放器組件
↓
🖼 渲染顯示(OpenGL / Unity / Surface)
or
🧠 AI 模型分析模塊(YUV / RGB 回調)【控制閉環】
? 控制系統 / 調度系統 / 人工操作界面
🧠 3. 核心技術機制:針對每個延遲源頭逐一壓縮
| 鏈路節點 | 技術優化 | 延遲控制能力 |
|---|---|---|
| 編碼器側 | 支持 GOP/I幀間隔設置、硬編優先 | 首幀生成速度快 |
| 推流傳輸 | 支持 RTSP TCP/UDP 自適應、RTMP 低延遲模式 | 傳輸延遲低 |
| 播放內核 | 首幀拉起即播、關閉緩沖池、無預解碼等待 | 平均解碼延遲低 |
| 渲染回調 | 支持 YUV/RGB 每幀回調 + 紋理加速渲染 | 可直接對接 OpenCV、YOLO 等模型 |
| 多路同步 | 支持并發拉流與切流控制 + 幀對齊 | 滿足多終端調度需求 |
| 平臺適配 | 同一播放核心跨 Android / Windows / Linux / Unity 等 | 無需額外移植成本 |
全鏈路可控制延遲壓縮至 100-200ms 端到端,適用于高實時性任務(避障、識別、協同)。
🌐 4. 協議選型與場景匹配建議
| 場景 | 推薦協議 | 原因 |
|---|---|---|
| 局域網邊緣節點(固定翼、地面站) | RTSP + UDP | 延遲最低,控制最精細,適合 AI 分析 |
| 弱網移動終端(手持站控) | RTSP + TCP | 可抗丟包,斷點續播穩定 |
| 跨域遠程調度中心 | RTMP + 自定義緩沖參數 | 兼容公網,支持轉 CDN / 云展示 |
| 多終端并發接入 | RTSP 多實例播放 + 紋理同步 | 支持畫面快速切換與多源協同 |
| AI模型接入需求 | 任何協議 + 幀回調接口 | YUV / RGB 幀直接對接模型或業務邏輯 |
📦 5. 模塊化能力矩陣總覽
| 能力模塊 | 支持情況 | 說明 |
|---|---|---|
| RTSP/RTMP 播放 | ? | 支持裸碼流,低延遲模式 |
| 多平臺播放內核 | ? | Android / Windows / Unity / Linux 同一內核 |
| 視頻回調接口 | ? | 支持 RGB/YUV 幀級數據回調 |
| 硬解 / 渲染接口 | ? | 支持 OpenGL、Unity 紋理綁定渲染 |
| 低延遲推流組件 | ? | 支持 I幀控制、碼率控制、斷點續推 |
| 控制指令對接 | ? | 支持時間戳輸出與控制系統聯動 |
? 小結:大牛直播SDK重構了“看-控-判”鏈路的技術基底
大牛直播SDK不是“用得方便”的播放器,而是“適合系統落地”的視覺鏈路中樞。
它不是“為了播放服務”,而是為了“支撐低空智能系統的感知、控制與判斷”而構建。從工程角度,它解決了傳統方案無法勝任的四大核心問題:
-
延遲可控
-
數據可用(供AI / 控制系統使用)
-
部署可擴展
-
協議可靈活組合
? 這是一套為“飛得更智能”而生的視覺鏈路解決方案。
? 它正成為新一代低空系統中的“視頻基礎設施模塊”。
?
🛰? 典型場景部署:大牛直播SDK在低空經濟中的實戰應用
低空經濟涵蓋了從民用到工業、從單機作業到空地協同的廣泛任務類型。在不同應用場景中,視頻鏈路的性能表現往往直接決定了作業效率、控制安全性和智能系統的可落地性。
以下是多個已知場景中,大牛直播SDK + RTSP/RTMP鏈路的典型部署方式與能力表現。
🚁 場景一:城市低空物流(eVTOL調度監控)
需求背景:城市低空無人機物流需搭建飛行狀態監控平臺,視頻回傳至調度中心 + 手持終端,用于任務態勢感知與應急指揮。
| 要求 | 技術部署 |
|---|---|
| 視頻回傳實時性 < 200ms | 飛行器端內嵌 SDK 推流模塊(RTMP 推至邊緣節點) |
| 調度系統 Web 端可視化 | 邊緣轉 WebRTC / HTTP-FLV 播放,同時內部使用 SDK 播放器低延遲展示 |
| 多路航線并發調度 | 大牛直播SDK支持多路并發解碼與畫面切換 |
| 數據可用于識別風切/安全隱患 | 通過 YUV 幀回調接入輕量 AI 風場識別模型 |
🏭 場景二:智慧工業巡檢(電力/化工廠區)
需求背景:無人機按預定路徑巡航,檢查變電站、塔桿、化工反應裝置是否存在銹蝕、泄露、高溫等異常,需同步視頻與 AI 判圖。
| 要求 | 技術部署 |
|---|---|
| 視頻邊飛邊傳,AI 實時分析 | 飛行端推 RTSP(輕量級RTSP服務),邊緣終端用 SDK 拉流+幀回調 |
| 網絡波動區域需保持連續畫面 | SDK 自動切換 RTSP TCP / UDP,具備斷點重連與緩沖清空機制 |
| 支持人工遠程查看任一節點 | 調度臺通過多實例播放器切換分路圖像 |
| 識別結果與畫面同步展示 | 使用時間戳機制回傳 AI 判定點至界面 |
🚨 場景三:城市安防巡邏(夜間布控 / 高密人流監測)
需求背景:布控無人機搭載熱成像或夜視攝像頭,需低延遲直播畫面至執法平臺,支持目標跟蹤、聚集檢測、自動告警。
| 要求 | 技術部署 |
|---|---|
| 夜視畫面低延遲、無閃斷 | 使用大牛SDK推送 RTSP 裸流至邊緣服務器,實時解碼 |
| 多任務并行切流 | 支持 Android 移動終端同時切換多路任務畫面 |
| AI輔助分析 | 接入人流密度 / 夜間行人檢測模型,直接從 RGB 幀回調接入推理引擎 |
| 告警事件閉環 | SDK集成幀回調時間戳,支持警情定位標注與錄像 |
🌉 場景四:大型基礎設施空檢(橋梁/高鐵/輸電線)
需求背景:飛行器巡檢高精度目標(裂縫、腐蝕點、組件松動),并在現場做 AI 初篩識別,重要異常即刻回傳控制臺。
| 要求 | 技術部署 |
|---|---|
| 超高圖像質量支持 | 支持 2K/4K H.265 編碼視頻推流,SDK端軟硬解自動適配 |
| 延遲低于 150ms | GOP 控制為 10~15,首幀即播機制啟用 |
| 工程師可一鍵錄像 / 抓拍 / 標注 | 播放器內集成錄像、快照 API,并支持 YUV 數據輸出用于后處理 |
| 可拓展至AI質量檢測模型 | 與 OpenCV + 結構識別模型聯動,通過幀回調精準配圖位置 |
🧠 總結:場景雖異,鏈路核心訴求一致
| 場景類型 | 視覺鏈路核心訴求 | 大牛直播SDK滿足能力 |
|---|---|---|
| 城市物流 / 巡控 | 實時性 + 多終端接入 | 推拉流模塊全平臺支持,延遲可控 |
| 工業巡檢 / 安防 | 弱網適應 + 智能分析 | TCP/UDP切換,YUV幀回調、AI可接入 |
| AI輔助決策 | 高幀畫質 + 幀級處理能力 | 支持幀編號、時間戳輸出、同步渲染 |
| 多任務調度 | 切換快 + 同步好 | 支持多路并發拉流 + 紋理渲染回調 |
? 不同的飛行器、終端系統與任務目標,映射出的其實是對“視頻鏈路底層基礎設施”的共同需求。
? 大牛直播SDK,以其模塊化架構與低延遲能力,正在成為低空場景中“最輕量也最強大的視頻神經組件”。
?
📦 模塊能力矩陣與系統集成建議
? 能力矩陣總覽:為“視頻 × 智能”任務打造的系統級組件組合
| 模塊類別 | 能力項 | 描述 | 工程價值 |
|---|---|---|---|
| 推流組件 | RTSP / RTMP 推流 | 支持 H.264 / H.265 編碼,GOP/I幀可調 | 構建低延遲上行鏈路,適配無人端輸出 |
| ? | 音頻采集與推送 | 支持麥克風 / 內錄 / 多聲道 | 可錄任務語音或遠程通話 |
| ? | 弱網重連機制 | 支持網絡中斷自恢復 | 適配山區、海面、復雜城域環境 |
| 播放組件 | RTSP / RTMP 播放器 | 支持裸流、封裝流,低緩沖延遲 | 多平臺嵌入式播放,延遲 <200ms |
| ? | 多實例拉流 | 單進程多路解碼并發 | 支持“多畫面協同”場景 |
| ? | OpenGL / Unity 渲染 | 支持 OES 紋理、貼圖輸出 | 可嵌入 3D 可視化引擎 |
| AI對接能力 | 幀級 RGB/YUV 回調 | 每幀解碼后送入分析模型 | 與 OpenCV / YOLO / TensorRT 等無縫聯動 |
| ? | 幀時間戳輸出 | 支持同步 AI、導航、日志系統 | 可用于智能標注、事件對齊 |
| 控制對接能力 | 快照 / 錄像 / 狀態回調 | 控制層直接調用 | 支持“看中即抓、控中即用” |
| ? | 支持切流控制 | 動態切換數據源或視角 | 滿足調度臺、地面站任務切換 |
| 部署適配 | 跨平臺SDK | Android / iOS / Windows / Linux / Unity | 一套代碼,多平臺共用 |
| ? | 編程語言支持 | C / C++ / Java / C# / Unity 腳本 |
📌 小結:組件化設計,系統級構建,工程化落地
與其說大牛直播SDK是一個視頻播放庫,不如說它是一個可插拔的低延遲視覺鏈路組件庫,具備如下關鍵特征:
-
模塊化 → 可選擇性集成推流/播放/回調等功能;
-
系統化 → 不只是“能播”,還能控、能識別、能同步;
-
工程友好 → 多平臺、跨語言、高度可控、可重構。
? 它讓“視頻”不再只是結果展示,而成為“系統感知與決策能力”的輸入接口,成為構建智能化低空基礎設施的關鍵組件。
🔚 結語與展望:讓視頻鏈路成為空天地一體系統的“感知基礎設施”
在低空經濟蓬勃發展的時代背景下,無人系統正從“可飛行”邁向“可調度、可協同、可智能”。以無人機為代表的飛行終端,不再只是物理載體,更成為信息的前線感知節點。它們的“眼睛”——視頻鏈路,正承擔起連接空域、地面與云端的關鍵使命。
🎯 視頻鏈路,不再只是“看得清”,而是智能系統的第一感官
-
? 對系統而言,視頻是觸發 AI 推理與控制執行的感知源;
-
? 對人機協同而言,視頻是完成遠程監控與操控的界面支點;
-
? 對平臺調度而言,視頻是實現多任務編組與反饋決策的核心數據流。
換言之,視頻不再是被動展示結果的“尾端組件”,而是主動觸發任務執行的“中樞入口”。
🧠 視頻基礎設施的三個演進趨勢:
| 傳統視頻系統 | 工業智能視頻系統 | 空天地一體化“視頻神經系統” |
|---|---|---|
| 僅支持播放展示 | 支持局部 AI 接入與控制協同 | 視頻成為全局智能節點的感知接口 |
| 單端解碼渲染 | 可對接 AI 模型 | 可跨平臺、跨節點同步與推理 |
| 人為輔助查看 | 支持規則觸發報警 | 支持任務閉環、自主協同判斷 |
?
🚀 大牛直播SDK:在新一代“空地協同系統”中的角色定位
隨著“空天地一體化”體系加速落地,未來將呈現出多平臺協同感知、多任務調度聯動、多智能節點并行決策的新生態。在這個過程中,大牛直播SDK的定位不再局限于“播放器”或“推流器”,而是:
? 一種跨平臺、跨協議、可編程、可協同的視頻鏈路基礎設施層
它具備:
-
📡 對接飛行終端與地面系統的傳感能力;
-
🧠 支撐邊緣智能與云端 AI 分析的數據入口能力;
-
?? 支持調度系統與指揮平臺的任務可視化與閉環控制能力;
-
🧩 適配各種異構系統與操作環境的工程可用性。
換言之,大牛直播SDK 是低空經濟的“視頻管道層”,是多智能體感知體系的“視頻神經層”,也是未來空地協同系統中的基礎設施組件。
🌐 展望未來:從“低空感知”邁向“智能協同網絡”
未來的無人系統不會孤立存在,它們將被納入一個覆蓋城市、鄉村、邊海疆的“空地感知與決策網絡”中:
-
從飛行平臺到地面控制,再到云端計算 → 需要視頻數據的實時通達;
-
從視頻到 AI 推理,再到系統反饋 → 需要數據的精準同步與可控性;
-
從人控系統到智能體協同 → 需要感知鏈路的標準化、平臺化、組件化。
? 視頻,將從“信息展示”躍升為“系統控制鏈條的一部分”;
? 而大牛直播SDK,將成為這一控制鏈條中的關鍵環節——視覺信號的標準入口。
? 結語一句話:
讓每一幀都可控,每一圖都可解,每一端都可聯,才能真正構建智能化的低空系統。
而大牛直播SDK,正是在這個體系中,讓視頻不止于看,更用于“協同、理解與執行”。
📎 CSDN官方博客:音視頻牛哥-CSDN博客
?





)





)

:設計思路與實現原理(C/C++代碼實現))
 條件指令、循環結構、定義函數)




