在 AI 系統大規模部署、設備邊緣化、數據實時化趨勢下,視頻能力的部署方式正迎來深刻變革。2025世界人工智能大會(WAIC)上,視頻感知與智能決策之間的“連接效率”成為關鍵話題。而在這場連接能力的競爭中,輕量級、標準化、可控的 RTSP 視頻服務,正逐漸成為智能系統的剛需組件。
本文將聚焦于大牛直播SDK輕量級RTSP服務模塊,解析其如何在邊緣側高效輸出標準視頻流,打通視頻 → AI → 控制的智能閉環。
一、WAIC 2025:邊緣智能的主戰場,是“數據從哪里來”
在剛剛落幕的 WAIC 2025 世界人工智能大會上,“邊緣智能”毫無疑問成為全場最具技術溫度和落地熱度的話題。展區中隨處可見具身智能機器人、自動巡檢無人機、嵌入式AI盒子、多模態感知終端等“邊-端一體”設備,AI 正在以“泛在感知 + 就地決策”的方式快速滲透到能源、電力、交通、工業、安防、醫療等核心場景。

然而,當我們聚焦這些設備背后的技術路徑時,一個更底層但卻更關鍵的問題被反復提及:
AI 決策越來越強,設備算力也越來越高,但這些智能系統,
到底從哪獲取輸入數據?數據真的“夠快、夠穩、夠標準”嗎?
? 萬物皆智能的時代,“輸入層”才是關鍵瓶頸
在傳統中心式AI架構中,視頻采集 → 上傳云端 → 分析決策的路徑雖然清晰,但對帶寬、延遲、可靠性依賴極高,已難以適配今天的工業級部署要求。因此,“數據輸入”的邏輯正在重構:
-
感知要靠邊緣:攝像頭、相機、紅外模塊等部署在設備本地;
-
分析要靠邊緣:推理模型在端側本地運行,實時響應;
-
連接必須輕量化:視頻流不能再依賴復雜的中轉服務器體系;
-
輸出必須標準化:每一個設備都應具備統一、開放的視頻訪問接口。
🎯 這意味著:邊緣AI的競爭,首先是“數據入口能力”的競爭。誰能快速、穩定、標準地把視頻流推出來,誰就擁有了連接智能系統的主動權。
📉 當前系統普遍面臨的困境包括:
| 問題類別 | 具體表現 |
|---|---|
| 接入門檻高 | 視頻只能通過定制接口獲取,不支持標準播放器接入 |
| 協議不統一 | 每個設備輸出方式不同,開發難度大、維護成本高 |
| 延遲不可控 | 無法精準控制幀輸出節奏,影響AI推理實時性 |
| 兼容性差 | 無法與 VLC、FFmpeg、AI平臺標準協議兼容 |
| 架構復雜 | 為了視頻推送還需搭建 Nginx + RTSP Server 等服務 |
而正是在這一背景下,輕量級、嵌入式、可部署的 RTSP 視頻服務模塊,開始成為 AI 感知系統架構中不可或缺的“輸入引擎”。
就像串口讓設備具備了通信能力,RTSP 讓視覺設備具備了**“標準化可連接能力”**,是 AI 感知閉環中真正的基礎設施組件。
二、輕量級 RTSP 服務:讓每個設備都具備“視頻輸出標準能力”
當下的 AI 系統越來越強調“邊緣就地計算”與“分布式感知能力”,而這一切的基礎,仍然是設備如何將感知到的視頻數據可靠、高效、標準化地輸出。
傳統設備往往只負責攝像與編碼,缺乏完整的視頻服務能力,尤其在“多終端協同”、“遠程調試”、“AI接入”這類場景中,如何讓每一個設備都能像視頻服務器一樣“說話”,成為工程部署中的痛點之一。
Windows和安卓播放RTSP和RTMP流延遲測試
🧩 現實中的視頻輸出痛點:
| 類別 | 痛點描述 |
|---|---|
| ? 無標準接口 | 攝像頭或設備僅能本地顯示,無法遠程訪問 |
| ? 開發復雜 | 視頻輸出依賴自研推流程序,協議不通用 |
| ? 運維成本高 | 通常需搭建額外 RTSP/RTMP 服務端,配置繁瑣 |
| ? 性能不可控 | 自建服務常出現卡頓、延遲高、資源占用過重 |
| ? 難以對接 AI | 無法輸出 YUV/RGB 裸流,難以輸入至 AI 模型 |
? 大牛直播SDK 輕量級 RTSP 服務模塊,正是為解決這些問題而設計的關鍵組件。
它是一款面向邊緣設備、智能終端、攝像模組、機器人、無人設備等場景,專用于將裸數據(H.264/H.265 或 YUV/RGB)實時封裝為標準 RTSP 流的嵌入式服務模塊。
無需搭建流媒體服務器、無需中轉轉碼,僅需輕量集成,即可將設備升級為具備標準視頻服務能力的節點。
🚀 模塊核心功能與優勢概覽
| 功能模塊 | 技術細節 | 應用價值 |
|---|---|---|
| 📦 極致輕量 | 整體庫size不大,無需第三方依賴 | 可嵌入到 ARM、x86、移動設備、嵌入式平臺 |
| 🌐 原生協議 | 遵循標準 RTSP 協議,兼容 VLC、FFmpeg、OpenCV 等 | 可直接被各類 AI 系統、播放器或平臺識別 |
| 🧩 簡單集成 | 提供裸流推送接口(YUV/NV12/H.264)與封裝控制 | 快速構建 RTSP 輸出服務,無需額外開發 |
| ? 低延遲優化 | 支持 GOP/I幀/緩沖等參數配置 | 滿足 AI 控制、無人巡邏等延遲敏感場景 |
| 🔐 安全控制 | 支持賬號密碼訪問鑒權 | 適配局域網/公網混合部署,保證接入安全 |
| 🔄 多路并發 | 支持多客戶端并行訪問,動態調控碼流 | 支持邊看邊分析、邊播邊錄、多算法接入 |
🎯 模塊不僅是“視頻接口”,更是“智能接口”
它將圖像數據從“設備內部”變為“系統可訪問的資源”,從“私有推送”變為“標準輸入”,極大簡化了從“硬件感知”到“AI計算”的鏈路搭建過程。
在邊緣智能、設備視頻化、AI就地計算快速發展的背景下,視頻流的“輸出方式”正在從傳統重服務器架構轉向更小型、更輕便、更靈活的“嵌入式標準輸出模塊”。
輕量級 RTSP 服務模塊,正是這一趨勢下的關鍵技術落點。
📊 傳統方式 vs 大牛輕量RTSP模塊 —— 全面對比表
| 對比維度 | 傳統推流方式(如 FFmpeg + 服務端) | 大牛輕量級 RTSP 服務模塊 |
|---|---|---|
| 🧱 架構復雜度 | 高:需額外部署 RTSP/RTMP 服務器、配置轉碼 | 極簡:模塊即服務端,免配置即運行 |
| 🧩 集成難度 | 高:接口多、代碼量大、依賴多 | 低:調用接口推幀,幾行代碼接入 |
| 🌐 協議兼容性 | 不一定支持標準 RTSP 或客戶端兼容性差 | 原生支持 RFC2326 RTSP 協議,兼容 VLC/FFmpeg/ONVIF |
| ? 延遲控制 | 不穩定,易引入緩沖延遲 | 精準控制 GOP、緩沖幀,支持 <150ms 延遲 |
| ?? 系統資源占用 | 高:需處理多進程、多模塊資源調度 | 極低:輕量庫,無外部依賴,適配嵌入式 |
| 🔒 安全機制 | 需開發鑒權邏輯,安全能力弱 | 內置用戶名密碼權限控制,輕松管控 |
| 📦 部署平臺 | 主要用于 PC/服務器 | 適用于 Android、Linux、嵌入式、單板機、機器人等 |
| 🤝 維護成本 | 升級困難,跨平臺適配復雜 | 標準接口,跨平臺部署簡單,升級便捷 |
一句話總結:
📡 大牛輕量級 RTSP 模塊,讓每一個攝像頭、機器人、傳感設備都能即刻變成一個“會說話的視頻節點”,真正接入 AI 世界。
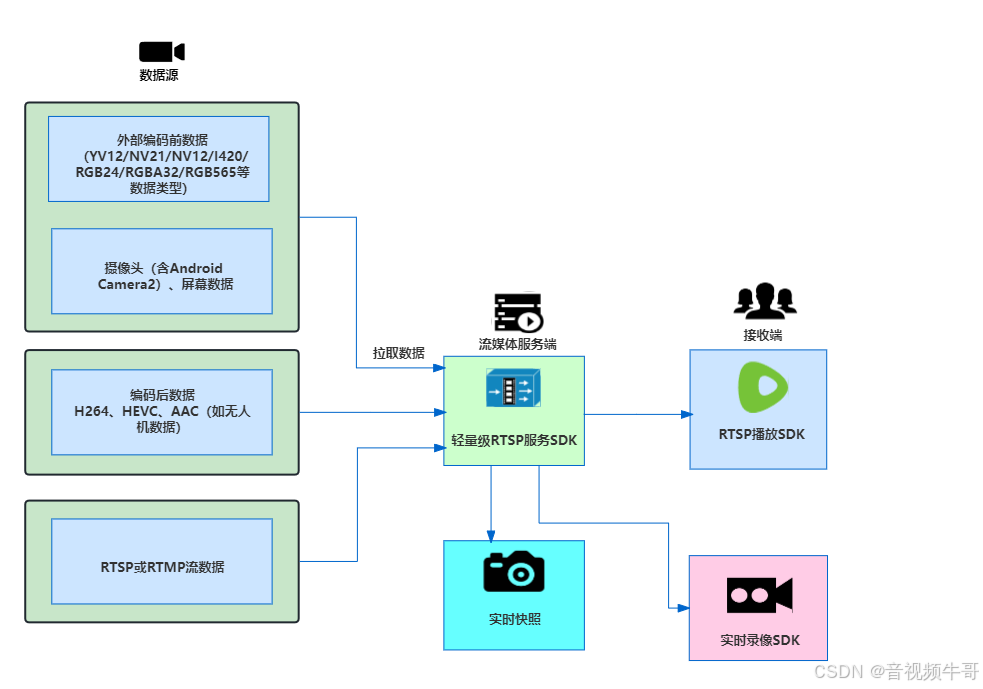
三、技術架構圖:RTSP服務模塊在 AI 系統中的位置
在典型的 AI 邊緣智能架構中,從“感知源”到“智能響應”通常分為三大層級:設備采集層、標準輸入層、AI處理層。
其中,RTSP服務模塊扮演著“橋梁”角色——將設備原始視頻數據轉換為系統可統一接入的標準流格式,是整個智能鏈路順暢運行的關鍵中介環節。
📊 AI 邊緣感知系統中的模塊級位置圖:
+---------------------------------------------------------+
| 視頻感知設備 / 圖像采集模塊 |
| - 工業相機 / 攝像頭 / 編碼器 / AI終端設備 |
| - 輸出原始 YUV、NV12、H.264 等圖像幀格式 |
+------------------------------+--------------------------+|v
+---------------------------------------------------------+
| DaniuSDK Lightweight RTSP Service Module |
| ? 接收裸流幀 (YUV/NV12/H.264/H.265) |
| ? 實時封裝為標準 RTSP 協議流 |
| ? 內嵌服務器功能,支持多客戶端訪問 |
| ? 提供賬號鑒權、安全控制、碼流調控功能 |
+------------------------------+--------------------------+|v
+---------------------------------------------------------+
| AI 系統 / 分析引擎 / 中控平臺 |
| - VLC / FFmpeg / OpenCV / GStreamer / ONVIF 平臺 |
| - AI模型引擎(YOLO / UNet / OpenVINO / TensorRT) |
| - 上位機可視化 / 遠程平臺 / 云邊協同系統 |
+---------------------------------------------------------+
📌 技術定位總結:
| 系統層級 | 模塊角色 | 核心任務 | 模塊價值 |
|---|---|---|---|
| 📷 感知采集層 | 攝像頭 / 編碼器 | 采集圖像數據 | 獲取世界物理狀態 |
| 🌐 標準輸入層 | 大牛RTSP模塊 | 將原始幀封裝為標準RTSP協議流 | 建立視頻訪問統一接口 |
| 🧠 智能處理層 | AI引擎 / 播放端 | 進行視頻分析、識別與展示 | 驅動智能判斷與聯動控制 |
? 為什么這個位置至關重要?
-
若無此模塊,設備輸出的原始幀格式需專用代碼解析,難以復用,且對系統適配性差;
-
若采用傳統重型流媒體服務,部署復雜、運維成本高、占用系統資源多;
-
而輕量RTSP模塊可直接嵌入設備端或邊緣節點,實時完成標準化封裝,系統“即插即識”;
-
AI平臺 / 控制平臺可使用任意標準播放器或分析引擎接入,極大提升系統開放性與靈活性。
📌 應用場景下的“視頻入口標準化”價值:
| 應用類型 | 接入效率 | 系統改造成本 | 適配平臺 | 彈性擴展性 |
|---|---|---|---|---|
| 傳統方案 | ? 低 | ? 高 | ? 差 | ? 差 |
| 大牛RTSP模塊 | ? 即接即用 | ? 零改代碼集成 | ? 跨平臺 | ? 多端接入支持 |
一句話總結:
📡 大牛RTSP服務模塊將“圖像幀”變為“系統語言”,把感知數據變為可識別、可分析、可聯動的智能輸入。
它不是替代流媒體服務,而是徹底嵌入設備,使每一個終端都擁有“開口說話”的能力,推動視頻成為AI系統真正可用、可控的資產。
四、典型場景落地參考:讓 AI 設備“開口說話”
AI 系統越來越“聰明”,但要真正實現閉環智能,設備端必須具備“標準化表達”的能力。所謂“開口說話”,指的是設備能夠以通用、可被識別的協議,實時、穩定地將其采集的視頻數據輸出到系統中,供 AI 處理、展示或存檔。
大牛直播SDK輕量級RTSP服務模塊,正是在多個行業場景中,幫助設備具備這一能力的關鍵工具。它讓原本沉默的視覺設備,具備了“被看見”的接口,“被理解”的可能。
📍 應用場景一:無人機視頻圖傳模塊標準化
傳統挑戰:
-
飛控系統輸出為 H.264 編碼數據,需依賴專屬 App 播放或 USB 回放;
-
無法被第三方平臺(如 VLC、ONVIF 系統、AI邊緣盒子)直接接入;
-
推流服務部署成本高、抗弱網能力差。
大牛SDK解決方案:
-
在飛控側或圖傳模組中嵌入 RTSP 服務模塊;
-
裸流輸入 → 實時封裝為標準 RTSP 視頻流;
-
控制中心可使用 VLC / AI 模型平臺直接拉流分析。
📍 應用場景二:安防機器人 / 移動巡邏終端
現實需求:
-
邊緣智能機器人配有攝像頭和AI芯片,具備實時感知能力;
-
視頻需要同時傳輸給遠程值守中心、AI識別模型和平臺可視化模塊;
-
網絡環境復雜,傳統推流不穩定。
模塊賦能:
-
RTSP模塊嵌入機器人系統,統一對外輸出可拉取的視頻流;
-
支持多客戶端并發接入(例如:監控平臺 + AI邊緣盒子 + 中控);
-
可設置賬號密碼權限控制,保障安全性;
-
避免重復編碼、傳輸資源浪費,節能降耗。
📍 應用場景三:工業視覺產線檢測系統
問題痛點:
-
工業相機拍攝高幀率圖像,直接寫入本地再分析存在延遲;
-
通常使用USB接入、SDK調幀,難以跨平臺或遠程調用。
模塊能力:
-
直接對接 YUV/NV12 數據幀,通過 RTSP 輸出實時畫面;
-
AI模型平臺邊拉邊推理,實現在線缺陷檢測;
-
支持快照、錄像、抓圖、標注等后處理流程;
-
可被 OpenCV / TensorRT / ONNX 等框架輕松接入。
📍 應用場景四:醫療影像設備 / 顯微圖像系統
痛點說明:
-
顯微成像設備常以 HDMI 輸出本地顯示為主;
-
無網絡接口、無標準視頻服務能力,難以支持遠程教學、專家遠程查看。
模塊賦能:
-
嵌入 RTSP 服務模塊,即刻將視頻幀通過網絡推為標準流;
-
教學終端、手術協作系統可實時拉流、遠程講解;
-
實現邊看邊評估、實時互動、AI協同分析。
🧠 應用價值匯總表
| 行業領域 | 使用場景 | 模塊帶來的核心價值 |
|---|---|---|
| 航空/電力 | 無人機圖傳 | 推流去中心化、低延遲、高可接入性 |
| 安防/園區 | 移動巡邏機器人 | 多端協同播放、安全認證、帶寬控制 |
| 制造/質檢 | 高速產線檢測 | 實時視頻AI分析、數據流無縫對接 |
| 醫療/科研 | 顯微圖像輸出 | 視頻教學直播、專家遠程診療協作 |
| 農業/林業 | 農田監測設備 | 原始畫面接入AI分析平臺,檢測蟲害、識別成熟度 |
? 這些場景共同體現出的一點:
大牛輕量RTSP模塊,不是簡單的“視頻輸出工具”,而是賦予設備“系統語言表達能力”的感知通信接口。
每一個終端設備都因其存在而成為一個可感知、可接入、可計算的“智能節點”,真正打通了“數據 → 連接 → AI處理 → 決策”鏈條的第一環。
🔚 總結:讓視頻能力像“串口”一樣簡單輸出
在計算機發展初期,串口(Serial Port)成為連接設備與系統的“通用語言”:它標準、簡單、可靠,讓無數工業設備第一次具備了“被系統識別和控制”的能力。
今天,面對由 AI 驅動的智能新時代,我們迎來了另一個關鍵接口的重構時刻——視頻輸出能力。
過去的視頻服務往往意味著:
-
搭服務器、寫推流器、配協議棧;
-
高延遲、高復雜度、高集成門檻;
-
不可控、不可復用、不夠開放。
而 大牛直播SDK 輕量級 RTSP 服務模塊 正在改變這一切。
它讓“視頻輸出”從一個繁重的系統任務,變成了像“串口通信”一樣輕量、標準、可移植的能力接口。只需嵌入模塊,傳入圖像幀,即可:
-
用標準 RTSP 協議發布視頻;
-
被 VLC、FFmpeg、AI模型框架即插即用;
-
支持多終端協同拉流、處理、控制。
這不僅大幅降低了視頻設備對接智能系統的技術門檻,更在本質上推動了**“感知層”標準化、結構化、系統化**的進程。
在一個邊緣泛在、算力分布、數據驅動的未來世界里:
不是每個設備都需要部署AI,但每個設備都需要有表達能力。
不是每個設備都需要看得懂,但每個設備都要“看得見 + 說得出”。
大牛輕量 RTSP 模塊,正是為此而生——讓每一臺智能設備,不再是沉默的“圖像源”,而是具備網絡身份與語義輸出能力的“智能節點”。
它不僅是視頻流的一次輕量封裝,更是智能系統從“感知多樣”走向“感知統一”的關鍵跳板。
未來,大牛直播SDK 也將繼續在視頻輸入/輸出能力標準化、邊緣AI協同接口、流媒體輕服務化等方向上持續創新,為萬物智聯的時代打下更穩固的“視覺基礎設施”。
📌 想了解更多?歡迎訪問:CSDN官方博客:https://daniusdk.blog.csdn.net





![[python][flask]flask藍圖使用方法](http://pic.xiahunao.cn/[python][flask]flask藍圖使用方法)







![[ctfshow web入門]web99 in_array的弱比較漏洞](http://pic.xiahunao.cn/[ctfshow web入門]web99 in_array的弱比較漏洞)





)