文章目錄
- 13.5. 多尺度目標檢測
- 13.5.1. 多尺度錨框
- 13.5.2. 多尺度檢測
- 13.5.3. 小結
- 13.6. 目標檢測數據集
- 13.6.2. 讀取數據集
- 13.6.3. 演示
- 13.7. 單發多框檢測(SSD)
- 13.7.1. 模型
- 13.7.1.1. 類別預測層
- 13.7.1.2. 邊界框預測層
- 13.7.1.3. 連結多尺度的預測
- 13.7.1.4. 高和寬減半塊
- 13.7.1.5. 基本網絡塊
- 13.7.1.6. 完整的模型
- 13.7.2. 訓練模型
- 13.7.2.1. 讀取數據集和初始化
- 13.7.2.2. 定義損失函數和評價函數
- 13.7.2.3. 訓練模型
- 13.7.3. 預測目標
- 13.7.4. 小結
- 13.8. 區域卷積神經網絡(R-CNN)系列
- 13.8.1. R-CNN
- 13.8.2. Fast R-CNN
- 13.8.3. Faster R-CNN
- 13.8.4. Mask R-CNN
- 13.8.5. 小結
13.5. 多尺度目標檢測
在 13.4節中,我們以輸入圖像的每個像素為中心,生成了多個錨框。 基本而言,這些錨框代表了圖像不同區域的樣本。 然而,如果為每個像素都生成的錨框,我們最終可能會得到太多需要計算的錨框。 想象一個 (561, 728)的輸入圖像,如果以每個像素為中心生成五個形狀不同的錨框,就需要在圖像上標記和預測超過200萬個錨框(561, 728, 5)。
13.5.1. 多尺度錨框
減少圖像上的錨框數量并不困難。 比如,我們可以在輸入圖像中均勻采樣一小部分像素,并以它們為中心生成錨框。 此外,在不同尺度下,我們可以生成不同數量和不同大小的錨框。 直觀地說,比起較大的目標,較小的目標在圖像上出現的可能性更多樣。 例如, 1x1、1x2 和 2x2 的目標可以分別以4、2和1種可能的方式出現在 2x2 圖像上。 因此,當使用較小的錨框檢測較小的物體時,我們可以采樣更多的區域,而對于較大的物體,我們可以采樣較少的區域。

回想一下,在 6.2節中,我們將卷積圖層的二維數組輸出稱為特征圖。 通過定義特征圖的形狀,我們可以確定任何圖像上均勻采樣錨框的中心。
display_anchors函數定義如下。 我們在特征圖(fmap)上生成錨框(anchors),每個單位(像素)作為錨框的中心。 由于錨框中的 (x, y)軸坐標值(anchors)已經被除以特征圖(fmap)的寬度和高度,因此這些值介于0和1之間,表示特征圖中錨框的相對位置。
由于錨框(anchors)的中心分布于特征圖(fmap)上的所有單位,因此這些中心必須根據其相對空間位置在任何輸入圖像上均勻分布。 更具體地說,給定特征圖的寬度和高度fmap_w和fmap_h,以下函數將均勻地對任何輸入圖像中fmap_h行和fmap_w列中的像素進行采樣。 以這些均勻采樣的像素為中心,將會生成大小為s(假設列表s的長度為1)且寬高比(ratios)不同的錨框。
def display_anchors(fmap_w, fmap_h, s):d2l.set_figsize()# 前兩個維度上的值不影響輸出fmap = torch.zeros((1, 10, fmap_h, fmap_w))# multibox_priors是在輸入的fmap每個像素上生成錨框,并且坐標在[0, 1]之間anchors = d2l.multibox_prior(fmap, sizes=s, ratios=[1, 2, 0.5])# 這里再*真實圖像寬高, 就變成了在真實圖像上均勻分布的錨框,并且上面fmap的寬高就是錨框在每行列上的個數bbox_scale = torch.tensor((w, h, w, h))d2l.show_bboxes(d2l.plt.imshow(img).axes,anchors[0] * bbox_scale)



13.5.2. 多尺度檢測

13.5.3. 小結
- 在多個尺度下,我們可以生成不同尺寸的錨框來檢測不同尺寸的目標。
- 通過定義特征圖的形狀,我們可以決定任何圖像上均勻采樣的錨框的中心。
- 我們使用輸入圖像在某個感受野區域內的信息,來預測輸入圖像上與該區域位置相近的錨框類別和偏移量。
- 我們可以通過深入學習,在多個層次上的圖像分層表示進行多尺度目標檢測。
13.6. 目標檢測數據集
目標檢測領域沒有像MNIST和Fashion-MNIST那樣的小數據集。 為了快速測試目標檢測模型,我們收集并標記了一個小型數據集。 首先,我們拍攝了一組香蕉的照片,并生成了1000張不同角度和大小的香蕉圖像。 然后,我們在一些背景圖片的隨機位置上放一張香蕉的圖像。 最后,我們在圖片上為這些香蕉標記了邊界框。
13.6.2. 讀取數據集
通過read_data_bananas函數,我們讀取香蕉檢測數據集。 該數據集包括一個的CSV文件,內含目標類別標簽和位于左上角和右下角的真實邊界框坐標。
#@save
def read_data_bananas(is_train=True):"""讀取香蕉檢測數據集中的圖像和標簽"""data_dir = d2l.download_extract('banana-detection')csv_fname = os.path.join(data_dir, 'bananas_train' if is_trainelse 'bananas_val', 'label.csv')csv_data = pd.read_csv(csv_fname)csv_data = csv_data.set_index('img_name')images, targets = [], []for img_name, target in csv_data.iterrows():images.append(torchvision.io.read_image(os.path.join(data_dir, 'bananas_train' if is_train else'bananas_val', 'images', f'{img_name}')))# 這里的target包含(類別,左上角x,左上角y,右下角x,右下角y),# 其中所有圖像都具有相同的香蕉類(索引為0)targets.append(list(target))return images, torch.tensor(targets).unsqueeze(1) / 256
解釋:
- csv_data = csv_data.set_index(‘img_name’) 和 for img_name, target in csv_data.iterrows(): 配合使用的作用:

- 最后返回
torch.tensor(targets).unsqueeze(1) / 256的作用:unsqueeze 是模擬一張圖像里面有多個目標檢測框,這里為了簡單直接都設置為1個檢測框。


13.6.3. 演示

13.7. 單發多框檢測(SSD)
在 13.3節— 13.6節中,我們分別介紹了邊界框、錨框、多尺度目標檢測和用于目標檢測的數據集。 現在我們已經準備好使用這樣的背景知識來設計一個目標檢測模型:單發多框檢測(SSD) (Liu et al., 2016)。 該模型簡單、快速且被廣泛使用。盡管這只是其中一種目標檢測模型,但本節中的一些設計原則和實現細節也適用于其他模型。
13.7.1. 模型
圖13.7.1描述了單發多框檢測模型的設計。 此模型主要由基礎網絡組成,其后是幾個多尺度特征塊。 基本網絡用于從輸入圖像中提取特征,因此它可以使用深度卷積神經網絡。 單發多框檢測論文中選用了在分類層之前截斷的VGG (Liu et al., 2016),現在也常用ResNet替代。 我們可以設計基礎網絡,使它輸出的高和寬較大。 這樣一來,基于該特征圖生成的錨框數量較多,可以用來檢測尺寸較小的目標。 接下來的每個多尺度特征塊將上一層提供的特征圖的高和寬縮小(如減半),并使特征圖中每個單元在輸入圖像上的感受野變得更廣闊。
回想一下在 13.5節中,通過深度神經網絡分層表示圖像的多尺度目標檢測的設計。 由于接近 圖13.7.1頂部的多尺度特征圖較小,但具有較大的感受野,它們適合檢測較少但較大的物體。 簡而言之,通過多尺度特征塊,單發多框檢測生成不同大小的錨框,并通過預測邊界框的類別和偏移量來檢測大小不同的目標,因此這是一個多尺度目標檢測模型。

13.7.1.1. 類別預測層
設目標類別的數量為 q 。這樣一來,錨框有 q+1 個類別,其中0類是背景。 在某個尺度下,設特征圖的高和寬分別為 h 和 w。 如果以其中每個單元為中心生成 a 個錨框,那么我們需要對 hwa 個錨框進行分類。 如果使用全連接層作為輸出,很容易導致模型參數過多。 回憶 7.3節一節介紹的使用卷積層的通道來輸出類別預測的方法, 單發多框檢測采用同樣的方法來降低模型復雜度。
具體來說,類別預測層使用一個保持輸入高和寬的卷積層。 這樣一來,輸出和輸入在特征圖寬和高上的空間坐標一一對應。 考慮輸出和輸入同一空間坐標(x, y):輸出特征圖上(x, y)坐標的通道里包含了以輸入特征圖(x, y)坐標為中心生成的所有錨框的類別預測。 因此輸出通道數為 a(q+1),其中索引為 i(q+1) + j的通道代表了索引為 i 的錨框有關類別索引為 j 的預測。
在下面,我們定義了這樣一個類別預測層,通過參數num_anchors和num_classes分別指定了 a 和 q。 該圖層使用填充為1的 3x3 的卷積層。此卷積層的輸入和輸出的寬度和高度保持不變。
%matplotlib inline
import torch
import torchvision
from torch import nn
from torch.nn import functional as F
from d2l import torch as d2ldef cls_predictor(num_inputs, num_anchors, num_classes):return nn.Conv2d(num_inputs, num_anchors * (num_classes + 1),kernel_size=3, padding=1)
13.7.1.2. 邊界框預測層
邊界框預測層的設計與類別預測層的設計類似。 唯一不同的是,這里需要為每個錨框預測4個偏移量,而不是 q+1 個類別。
def bbox_predictor(num_inputs, num_anchors):return nn.Conv2d(num_inputs, num_anchors * 4, kernel_size=3, padding=1)
13.7.1.3. 連結多尺度的預測
正如我們所提到的,單發多框檢測使用多尺度特征圖來生成錨框并預測其類別和偏移量。 在不同的尺度下,特征圖的形狀或以同一單元為中心的錨框的數量可能會有所不同。 因此,不同尺度下預測輸出的形狀可能會有所不同。
在以下示例中,我們為同一個小批量構建兩個不同比例(Y1和Y2)的特征圖,其中Y2的高度和寬度是Y1的一半。 以類別預測為例,假設Y1和Y2的每個單元分別生成了 5 個和 3 個錨框。 進一步假設目標類別的數量為 10,對于特征圖Y1和Y2,類別預測輸出中的通道數分別為 5x(10+1) = 55 和 3x(10+1) = 33,其中任一輸出的形狀是(批量大小,通道數,高度,寬度)。
def forward(x, block):return block(x)Y1 = forward(torch.zeros((2, 8, 20, 20)), cls_predictor(8, 5, 10))
Y2 = forward(torch.zeros((2, 16, 10, 10)), cls_predictor(16, 3, 10))
Y1.shape, Y2.shape
# 打印結果:
# (torch.Size([2, 55, 20, 20]), torch.Size([2, 33, 10, 10]))
正如我們所看到的,除了批量大小這一維度外,其他三個維度都具有不同的尺寸。 為了將這兩個預測輸出鏈接起來以提高計算效率,我們將把這些張量轉換為更一致的格式。
通道維包含中心相同的錨框的預測結果。我們首先將通道維移到最后一維。 因為不同尺度下批量大小仍保持不變,我們可以將預測結果轉成二維的(批量大小,高x寬x通道數)的格式,以方便之后在維度 1 上的連結。
def flatten_pred(pred):return torch.flatten(pred.permute(0, 2, 3, 1), start_dim=1)def concat_preds(preds):return torch.cat([flatten_pred(p) for p in preds], dim=1)
這樣一來,盡管Y1和Y2在通道數、高度和寬度方面具有不同的大小,我們仍然可以在同一個小批量的兩個不同尺度上連接這兩個預測輸出。
concat_preds([Y1, Y2]).shape
# 打印結果
# torch.Size([2, 25300])
13.7.1.4. 高和寬減半塊

13.7.1.5. 基本網絡塊

13.7.1.6. 完整的模型
完整的單發多框檢測模型由五個模塊組成。每個塊生成的特征圖既用于生成錨框,又用于預測這些錨框的類別和偏移量。在這五個模塊中,第一個是基本網絡塊,第二個到第四個是高和寬減半塊,最后一個模塊使用全局最大池將高度和寬度都降到1。從技術上講,第二到第五個區塊都是 圖13.7.1中的多尺度特征塊。
def get_blk(i):if i == 0:blk = base_net()elif i == 1:blk = down_sample_blk(64, 128)elif i == 4:blk = nn.AdaptiveMaxPool2d((1,1))else:blk = down_sample_blk(128, 128)return blk
現在我們為每個塊定義前向傳播。與圖像分類任務不同,此處的輸出包括:CNN特征圖Y;在當前尺度下根據Y生成的錨框;預測的這些錨框的類別和偏移量(基于Y)。
def blk_forward(X, blk, size, ratio, cls_predictor, bbox_predictor):Y = blk(X)# 基于當前的特征圖大小,生成的不同大小和寬高比的初始anchoranchors = d2l.multibox_prior(Y, sizes=size, ratios=ratio)# 基于當前特征圖,再過一層conv預測的每個anchor的類別cls_preds = cls_predictor(Y)# 基于當前特征圖,再過一層conv預測的每個anchor的偏移量bbox_preds = bbox_predictor(Y)return (Y, anchors, cls_preds, bbox_preds)

疑問:較大值為什么是這么計算的?

現在,我們就可以按如下方式定義完整的模型TinySSD了。
class TinySSD(nn.Module):def __init__(self, num_classes, **kwargs):super(TinySSD, self).__init__(**kwargs)self.num_classes = num_classes# 最開始的basenet輸出64通道,剩下的卷積都是輸出128通道idx_to_in_channels = [64, 128, 128, 128, 128]for i in range(5):# 即賦值語句self.blk_i=get_blk(i)setattr(self, f'blk_{i}', get_blk(i))setattr(self, f'cls_{i}', cls_predictor(idx_to_in_channels[i],num_anchors, num_classes))setattr(self, f'bbox_{i}', bbox_predictor(idx_to_in_channels[i],num_anchors))def forward(self, X):# 5個不同尺度特征圖上的輸出anchors, cls_preds, bbox_preds = [None] * 5, [None] * 5, [None] * 5for i in range(5):# getattr(self,'blk_%d'%i)即訪問self.blk_iX, anchors[i], cls_preds[i], bbox_preds[i] = blk_forward(X, getattr(self, f'blk_{i}'), sizes[i], ratios[i],getattr(self, f'cls_{i}'), getattr(self, f'bbox_{i}'))# 每個anchor: (1, N, 4), 1是unsqueeze固定為1, N是當前尺度特征圖的anchor數量anchors = torch.cat(anchors, dim=1) # (1, N', 4)# list中每個預測: (b, c, h, w), c=4x(1+1), 4是每個像素anchor數,(1+1)是目標類別+背景類別# 最后concat_preds之后:(b, h'w'c')cls_preds = concat_preds(cls_preds)# (b, h'w', c'), 也就是不同尺度的每個像素上anchor的類別cls_preds = cls_preds.reshape(cls_preds.shape[0], -1, self.num_classes + 1)# 同上,最后是(b, h'w'x4), 4是每個anchor固定的4個坐標偏移bbox_preds = concat_preds(bbox_preds)return anchors, cls_preds, bbox_preds
我們創建一個模型實例,然后使用它對一個 256x256 像素的小批量圖像X執行前向傳播。
如本節前面部分所示,第一個模塊輸出特征圖的形狀為 32x32。 回想一下,第二到第四個模塊為高和寬減半塊,第五個模塊為全局匯聚層。 由于以特征圖的每個單元為中心有 4(size=3, ratio=2, 3+2-1)個錨框生成,因此在所有五個尺度下,每個圖像總共生成 (322 + 162 + 82 + 42 + 1) x4 = 5444個錨框。注意第五個模塊為全局匯聚層,所以直接縮小到(1x1)像素。
net = TinySSD(num_classes=1)
X = torch.zeros((32, 3, 256, 256))
anchors, cls_preds, bbox_preds = net(X)print('output anchors:', anchors.shape)
print('output class preds:', cls_preds.shape)
print('output bbox preds:', bbox_preds.shape)# 打印輸出
# output anchors: torch.Size([1, 5444, 4])
# output class preds: torch.Size([32, 5444, 2])
# output bbox preds: torch.Size([32, 21776])
13.7.2. 訓練模型
現在,我們將描述如何訓練用于目標檢測的單發多框檢測模型。
13.7.2.1. 讀取數據集和初始化

13.7.2.2. 定義損失函數和評價函數
目標檢測有兩種類型的損失。 第一種有關錨框類別的損失:我們可以簡單地復用之前圖像分類問題里一直使用的交叉熵損失函數來計算; 第二種有關正類錨框偏移量的損失:預測偏移量是一個回歸問題。 但是,對于這個回歸問題,我們在這里不使用 3.1.3節中描述的平方損失,而是使用 L 1 L_1 L1? 范數損失,即預測值和真實值之差的絕對值。 掩碼變量bbox_masks令負類錨框和填充錨框不參與損失的計算。 最后,我們將錨框類別和偏移量的損失相加,以獲得模型的最終損失函數。
cls_loss = nn.CrossEntropyLoss(reduction='none')
bbox_loss = nn.L1Loss(reduction='none')def calc_loss(cls_preds, cls_labels, bbox_preds, bbox_labels, bbox_masks):batch_size, num_classes = cls_preds.shape[0], cls_preds.shape[2]cls = cls_loss(cls_preds.reshape(-1, num_classes),cls_labels.reshape(-1)).reshape(batch_size, -1).mean(dim=1)bbox = bbox_loss(bbox_preds * bbox_masks,bbox_labels * bbox_masks).mean(dim=1)return cls + bbox
我們可以沿用準確率評價分類結果。 由于偏移量使用了
范數損失,我們使用平均絕對誤差來評價邊界框的預測結果。這些預測結果是從生成的錨框及其預測偏移量中獲得的。
def cls_eval(cls_preds, cls_labels):# 由于類別預測結果放在最后一維,argmax需要指定最后一維。return float((cls_preds.argmax(dim=-1).type(cls_labels.dtype) == cls_labels).sum())def bbox_eval(bbox_preds, bbox_labels, bbox_masks):return float((torch.abs((bbox_labels - bbox_preds) * bbox_masks)).sum())
13.7.2.3. 訓練模型
在訓練模型時,我們需要在模型的前向傳播過程中生成多尺度錨框(anchors),并預測其類別(cls_preds)和偏移量(bbox_preds)。 然后,我們根據標簽信息Y為生成的錨框標記類別(cls_labels)和偏移量(bbox_labels)。 最后,我們根據類別和偏移量的預測和標注值計算損失函數。為了代碼簡潔,這里沒有評價測試數據集。
num_epochs, timer = 20, d2l.Timer()
animator = d2l.Animator(xlabel='epoch', xlim=[1, num_epochs],legend=['class error', 'bbox mae'])
net = net.to(device)
for epoch in range(num_epochs):# 訓練精確度的和,訓練精確度的和中的示例數# 絕對誤差的和,絕對誤差的和中的示例數metric = d2l.Accumulator(4)net.train()for features, target in train_iter:timer.start()trainer.zero_grad()X, Y = features.to(device), target.to(device)# 生成多尺度的錨框,為每個錨框預測類別和偏移量anchors, cls_preds, bbox_preds = net(X)# 為每個錨框標注類別和偏移量bbox_labels, bbox_masks, cls_labels = d2l.multibox_target(anchors, Y)# 根據類別和偏移量的預測和標注值計算損失函數l = calc_loss(cls_preds, cls_labels, bbox_preds, bbox_labels,bbox_masks)l.mean().backward()trainer.step()metric.add(cls_eval(cls_preds, cls_labels), cls_labels.numel(),bbox_eval(bbox_preds, bbox_labels, bbox_masks),bbox_labels.numel())cls_err, bbox_mae = 1 - metric[0] / metric[1], metric[2] / metric[3]animator.add(epoch + 1, (cls_err, bbox_mae))
print(f'class err {cls_err:.2e}, bbox mae {bbox_mae:.2e}')
print(f'{len(train_iter.dataset) / timer.stop():.1f} examples/sec on 'f'{str(device)}')
13.7.3. 預測目標


13.7.4. 小結
- 單發多框檢測是一種多尺度目標檢測模型。基于基礎網絡塊和各個多尺度特征塊,單發多框檢測生成不同數量和不同大小的錨框,并通過預測這些錨框的類別和偏移量檢測不同大小的目標。
- 在訓練單發多框檢測模型時,損失函數是根據錨框的類別和偏移量的預測及標注值計算得出的。
13.8. 區域卷積神經網絡(R-CNN)系列
除了 13.7節中描述的單發多框檢測之外, 區域卷積神經網絡(region-based CNN或regions with CNN features,R-CNN) (Girshick et al., 2014)也是將深度模型應用于目標檢測的開創性工作之一。 本節將介紹R-CNN及其一系列改進方法:快速的R-CNN(Fast R-CNN) (Girshick, 2015)、更快的R-CNN(Faster R-CNN) (Ren et al., 2015)和掩碼R-CNN(Mask R-CNN) (He et al., 2017)。 限于篇幅,我們只著重介紹這些模型的設計思路。
13.8.1. R-CNN
R-CNN首先從輸入圖像中選取若干(例如2000個)提議區域(如錨框也是一種選取方法),并標注它們的類別和邊界框(如偏移量)。 (Girshick et al., 2014)然后,用卷積神經網絡對每個提議區域進行前向傳播以抽取其特征。 接下來,我們用每個提議區域的特征來預測類別和邊界框。

圖13.8.1展示了R-CNN模型。具體來說,R-CNN包括以下四個步驟:
- 對輸入圖像使用選擇性搜索來選取多個高質量的提議區域 (Uijlings et al., 2013)。這些提議區域通常是在多個尺度下選取的,并具有不同的形狀和大小。每個提議區域都將被標注類別和真實邊界框;
- 選擇一個預訓練的卷積神經網絡,并將其在輸出層之前截斷。將每個提議區域變形為網絡需要的輸入尺寸,并通過前向傳播輸出抽取的提議區域特征;
- 將每個提議區域的特征連同其標注的類別作為一個樣本。訓練多個支持向量機對目標分類,其中每個支持向量機用來判斷樣本是否屬于某一個類別;
- 將每個提議區域的特征連同其標注的邊界框作為一個樣本,訓練線性回歸模型來預測真實邊界框。
盡管R-CNN模型通過預訓練的卷積神經網絡有效地抽取了圖像特征,但它的速度很慢。 想象一下,我們可能從一張圖像中選出上千個提議區域,這需要上千次的卷積神經網絡的前向傳播來執行目標檢測。 這種龐大的計算量使得R-CNN在現實世界中難以被廣泛應用。
13.8.2. Fast R-CNN
R-CNN的主要性能瓶頸在于,對每個提議區域,卷積神經網絡的前向傳播是獨立的,而沒有共享計算。 由于這些區域通常有重疊,獨立的特征抽取會導致重復的計算。 Fast R-CNN (Girshick, 2015)對R-CNN的主要改進之一,是僅在整張圖象上執行卷積神經網絡的前向傳播。

圖13.8.2中描述了Fast R-CNN模型。它的主要計算如下:
- 與R-CNN相比,Fast R-CNN用來提取特征的卷積神經網絡的輸入是整個圖像,而不是各個提議區域。此外,這個網絡通常會參與訓練。設輸入為一張圖像,將卷積神經網絡的輸出的形狀記為 1 × c × h 1 × w 1 1 \times c \times h_1 \times w_1 1×c×h1?×w1?;
- 假設選擇性搜索生成了 n 個提議區域。這些形狀各異的提議區域在卷積神經網絡的輸出上分別標出了形狀各異的興趣區域。然后,這些感興趣的區域需要進一步抽取出形狀相同的特征(比如指定高度 h 2 h_2 h2? 和寬度 w 2 w_2 w2?),以便于連結后輸出。為了實現這一目標,Fast R-CNN引入了興趣區域匯聚層(RoI pooling):將卷積神經網絡的輸出和提議區域作為輸入,輸出連結后的各個提議區域抽取的特征,形狀為 n × c × h 2 × w 2 n \times c \times h_2 \times w_2 n×c×h2?×w2?;
- 通過全連接層將輸出形狀變換為 n × d n \times d n×d,其中超參數 d
取決于模型設計; - 預測 n 個提議區域中每個區域的類別和邊界框。更具體地說,在預測類別和邊界框時,將全連接層的輸出分別轉換為形狀為 n × q n \times q n×q(q是類別的數量)的輸出和形狀為 n × 4 n \times 4 n×4 的輸出。其中預測類別時使用softmax回歸。
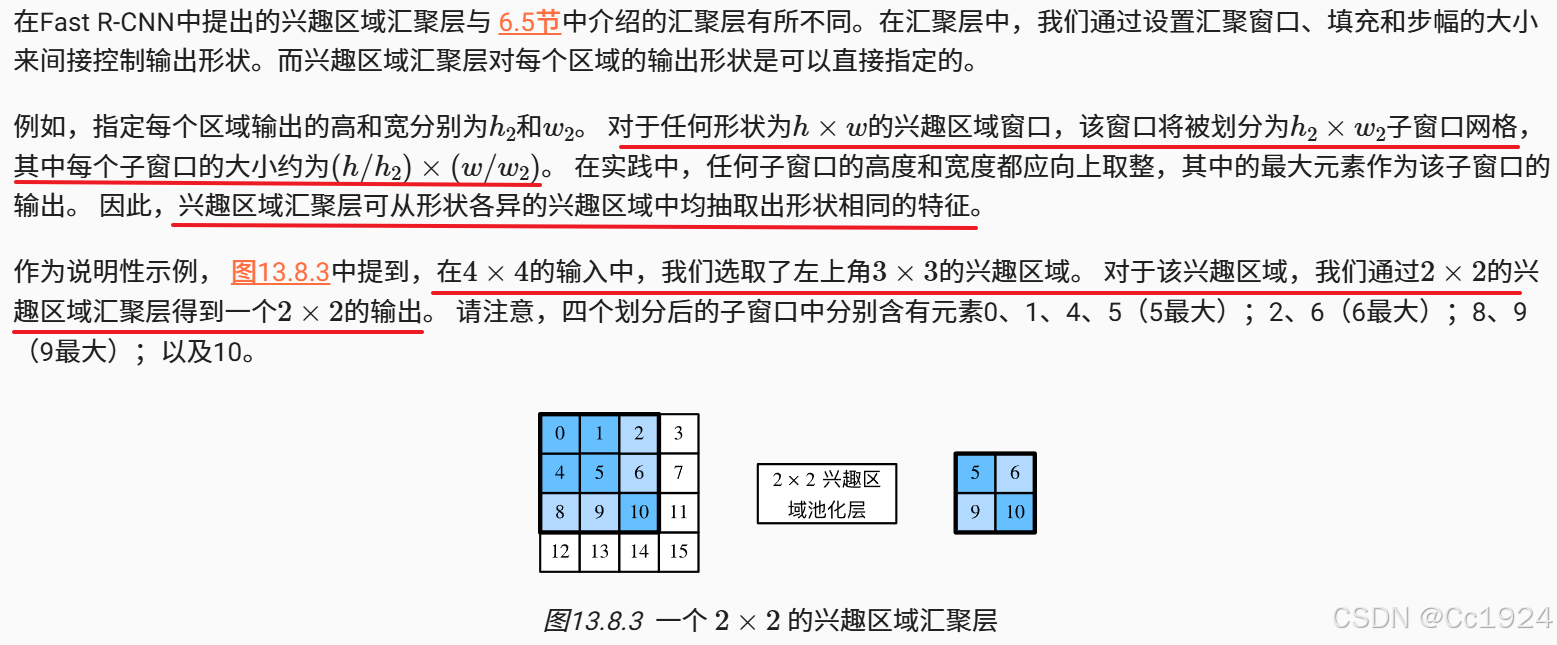
下面,我們演示了興趣區域匯聚層的計算方法。 假設卷積神經網絡抽取的特征X的高度和寬度都是4,且只有單通道。
import torch
import torchvisionX = torch.arange(16.).reshape(1, 1, 4, 4)
X
# 打印結果
# tensor([[[[ 0., 1., 2., 3.],
# [ 4., 5., 6., 7.],
# [ 8., 9., 10., 11.],
# [12., 13., 14., 15.]]]])
讓我們進一步假設輸入圖像的高度和寬度都是40像素,且選擇性搜索在此圖像上生成了兩個提議區域。 每個區域由5個元素表示:區域目標類別、左上角和右下角的 (x, y) 坐標。
rois = torch.Tensor([[0, 0, 0, 20, 20], [0, 0, 10, 30, 30]])
由于X的高和寬是輸入圖像高和寬的 1/10,因此,兩個提議區域的坐標先按spatial_scale乘以0.1。 然后,在X上分別標出這兩個興趣區域X[:, :, 0:3, 0:3]和X[:, :, 1:4, 0:4]。 最后,在 2x2 的興趣區域匯聚層中,每個興趣區域被劃分為子窗口網格,并進一步抽取相同形狀 2x2 的特征。
torchvision.ops.roi_pool(X, rois, output_size=(2, 2), spatial_scale=0.1)# 打印結果
# tensor([[[[ 5., 6.],[ 9., 10.]]],[[[ 9., 11.],[13., 15.]]]])
13.8.3. Faster R-CNN
為了較精確地檢測目標結果,Fast R-CNN模型通常需要在選擇性搜索中生成大量的提議區域。 Faster R-CNN (Ren et al., 2015)提出將選擇性搜索替換為區域提議網絡(region proposal network),從而減少提議區域的生成數量,并保證目標檢測的精度。

圖13.8.4描述了Faster R-CNN模型。 與Fast R-CNN相比,Faster R-CNN只將生成提議區域的方法從選擇性搜索改為了區域提議網絡,模型的其余部分保持不變。具體來說,區域提議網絡的計算步驟如下:
- 使用填充為1的 3x3 的卷積層變換卷積神經網絡的輸出,并將輸出通道數記為 c 。這樣,卷積神經網絡為圖像抽取的特征圖中的每個單元均得到一個長度為 c的新特征。
- 以特征圖的每個像素為中心,生成多個不同大小和寬高比的錨框并標注它們。
- 使用錨框中心單元長度為 c 的特征,分別預測該錨框的二元類別(含目標還是背景)和邊界框。
- 使用非極大值抑制,從預測類別為目標的預測邊界框中移除相似的結果。最終輸出的預測邊界框即是興趣區域匯聚層所需的提議區域。
值得一提的是,區域提議網絡作為Faster R-CNN模型的一部分,是和整個模型一起訓練得到的。 換句話說,Faster R-CNN的目標函數不僅包括目標檢測中的類別和邊界框預測,還包括區域提議網絡中錨框的二元類別和邊界框預測。 作為端到端訓練的結果,區域提議網絡能夠學習到如何生成高質量的提議區域,從而在減少了從數據中學習的提議區域的數量的情況下,仍保持目標檢測的精度。
13.8.4. Mask R-CNN
如果在訓練集中還標注了每個目標在圖像上的像素級位置,那么Mask R-CNN (He et al., 2017)能夠有效地利用這些詳盡的標注信息進一步提升目標檢測的精度。

如 圖13.8.5所示,Mask R-CNN是基于Faster R-CNN修改而來的。 具體來說,Mask R-CNN將興趣區域匯聚層替換為了 興趣區域對齊層,使用雙線性插值(bilinear interpolation)來保留特征圖上的空間信息,從而更適于像素級預測。 興趣區域對齊層的輸出包含了所有與興趣區域的形狀相同的特征圖。 它們不僅被用于預測每個興趣區域的類別和邊界框,還通過額外的全卷積網絡預測目標的像素級位置。 本章的后續章節將更詳細地介紹如何使用全卷積網絡預測圖像中像素級的語義。
13.8.5. 小結
- R-CNN對圖像選取若干提議區域,使用卷積神經網絡對每個提議區域執行前向傳播以抽取其特征,然后再用這些特征來預測提議區域的類別和邊界框。
- Fast R-CNN對R-CNN的一個主要改進:只對整個圖像做卷積神經網絡的前向傳播。它還引入了興趣區域匯聚層,從而為具有不同形狀的興趣區域抽取相同形狀的特征。
- Faster R-CNN將Fast R-CNN中使用的選擇性搜索替換為參與訓練的區域提議網絡,這樣后者可以在減少提議區域數量的情況下仍保證目標檢測的精度。
- Mask R-CNN在Faster R-CNN的基礎上引入了一個全卷積網絡,從而借助目標的像素級位置進一步提升目標檢測的精度。


















、地圖打印(webprinting)等服務)
全面指南:從基礎到實戰)