目錄
- 相關地震知識補充
- 地震數據的認識
- 地震幾何屬性
- 相干體算法
- 定義
- 基本原理
- 第一代相干體技術:基于互相關的相干體技術(Correlation)
- 第二代相干體技術:基于相似的相干體技術(Semblance)
- 基于多道相似的相干體技術
- 基于曼哈頓(Manhattan)距離的波形相似性算法
- 基于復地震道的相干體技術
- 參考
相關地震知識補充
地震數據的認識
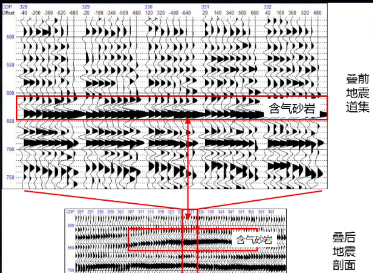
疊前數據和疊后數據的理解:
疊前和疊后是針對地震資料處理中的偏移來說的,由于地下介質不是水平的,導致反射波的同相軸發生偏移,從而不能正確反映地下介質的真實狀況,因此需要對地震資料進行偏移處理。偏移的方式有兩種:疊加之前偏移和疊加之后偏移,前者叫疊前,后者成為疊后。
各自的特點:
- 疊前數據:
- 信息完整性:保留原始地震波的全部動力學特征,包括振幅、頻率、相位等,對巖性變化和流體識別敏感;
- 信噪比低,隨機干擾強;
- 數據量龐大,存儲與計算成本高;
- 適用于復雜構造和高精度巖性分析;
- 疊后數據:
- 通過共中心點(CMP)疊加壓制隨機噪聲,顯著提高信噪比,但損失了部分振幅與相位細節;
- 數據量大幅壓縮,處理效率高;
- 主要用于構造解釋,適用于速度橫向變化平緩區域。
地震幾何屬性
地震幾何屬性是?從地震數據中提取的、描述地下地質體空間形態和結構特征的參數集合?(如反射界面的曲率、傾角、連續性等),主要用于刻畫地層界面、斷層、裂縫系統等構造的幾何形態變化。
- 區別于動力學屬性(振幅、頻率等),幾何屬性聚焦于構造形態而非巖性物性。
分類
| 類別 | 屬性 | 功能描述 |
|---|---|---|
| 連續性屬性 | 相干體(Coherence) | 量化相鄰道相似性,識別斷層、裂縫帶等不連續區域 |
| 曲率屬性 | 最大正曲率、最大負曲率 | 刻畫地層彎曲程度(如背斜、向斜),預測裂縫發育區 |
| ?梯度屬性 | 傾角(Dip)、方位角(Azimuth) | 描述地層界面空間產狀,恢復古構造格局 |
| ?邊緣檢測屬性 | 斷棱(Edge) | 強化斷層邊界,輔助斷裂系統精細解釋 |
相干體算法
定義
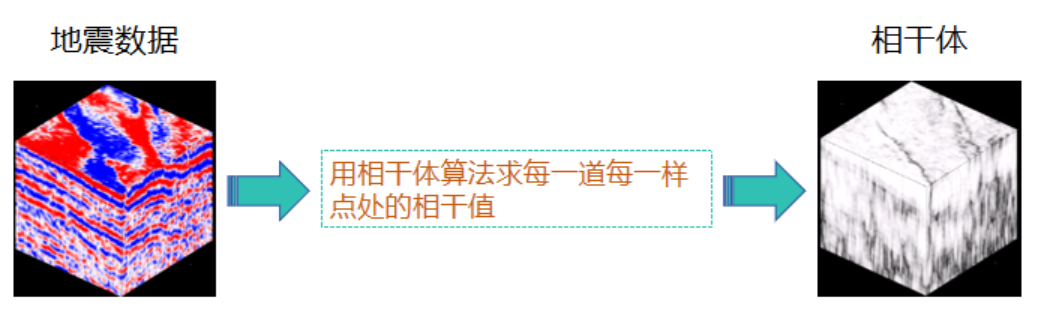
相干體是指由三維地震數據體經過相干處理而得到的一個新的數據體,其基本原理是在三維數據體中,求每一道每一樣點處小時窗內分析點所在道與相鄰道波形的相似性,形成一個表征相干性的三維數據體,即計算時窗內的數據相干性,把這一結果賦予時窗中心樣點。——Amoco公司
相干體技術是利用地震信號相干值的變化來描述地層、巖性等的橫向非均勻性,進而研究斷層、微斷裂的空間分布,地質構造異常及巖性的整體空間展布特征。
基本原理
物理基礎:地震波傳播時的相干性原理——當地層連續時,相鄰接收點記錄波形相位一致;地層破碎時,則波場散射,相位失配。
相似性度量:計算相鄰地震道波形的互相關系數或方差,量化地震信號的橫向連續性:
- 高相干值(接近1):反射界面連續,地質均勻;
- 低相干值(接近0):表示存在斷層、裂縫或巖性突變等不連續區域;
分割線中內容是在百度過程中,結合圖像相關寫出的推導,用來輔助理解吧
歸一化互相干(NCC)
在了解歸一化互相干系數之前,我們先回顧一下相關系數的計算:
r ( X , Y ) = C o v ( X , Y ) V a r ( X ) V a r ( Y ) C o v ( X , Y ) = E [ ( X ? E ( X ) ) ( Y ? E ( Y ) ) ] V a r ( X ) = E [ ( X ? E ( X ) ) 2 ] \begin{equation}\begin{aligned} r(X,Y) &= \frac{Cov(X,Y)}{\sqrt{Var(X)Var(Y)}}\\ Cov(X,Y) &= E[(X-E(X))(Y-E(Y))]\\ Var(X) &= E[(X-E(X))^2]\\ \end{aligned}\end{equation} r(X,Y)Cov(X,Y)Var(X)?=Var(X)Var(Y)?Cov(X,Y)?=E[(X?E(X))(Y?E(Y))]=E[(X?E(X))2]???
其中, C o v ( X , Y ) Cov(X,Y) Cov(X,Y)表示向量 X X X與 Y Y Y的協方差, V a r ( X ) Var(X) Var(X)和 V a r ( Y ) Var(Y) Var(Y)分別表示 X X X與 Y Y Y的方差。
歸一化互相關(Normalized Cross-Correlation, NCC)是一種用于衡量兩個信號相似度的算法,其核心是通過?消除幅度影響?提升匹配魯棒性。
窗口定義:以目標點為中心,選取 K × K K\times K K×K道(如3×3或5×5)的局部窗口),同時設置時間窗口大小為 k k k。
波形相似性計算?:對窗口內每一對相鄰地震道,逐時間樣點計算歸一化互相關系數:
ρ x y = ∑ i = t t + k ( x i ? μ x ) ? ( y i ? μ y ) ∑ i = t t + k ( x i ? μ x ) 2 ? ∑ i = t t + k ( y i ? μ y ) 2 \rho_{xy} = \frac{\sum\limits_{i = t}^{t+k}(x_i - \mu_x) \cdot (y_i - \mu_y)}{\sqrt{\sum\limits_{i = t}^{t+k}(x_i - \mu_x)^2} \cdot \sqrt{\sum\limits_{i = t}^{t+k} (y_i - \mu_y)^2}} ρxy?=i=t∑t+k?(xi??μx?)2??i=t∑t+k?(yi??μy?)2?i=t∑t+k?(xi??μx?)?(yi??μy?)?
其中:
- x i , y i x_i, y_i xi?,yi?:窗口內第 i i i個采樣點值(在地震資料處理,可理解位兩道時間序列);
- μ x , μ y \mu_x, \mu_y μx?,μy?:窗口內 x , y x, y x,y的均值;
輸出:將窗口內所有相鄰道對的平均 ρ \rho ρ值賦給目標點,生成?相干屬性體?(值域為[0,1],低值指示裂縫)
第一代相干體技術:基于互相關的相干體技術(Correlation)
相關性算法是根據隨機過程的互相關分析,計算相鄰地震道的互相關函數來反映相同軸的不連續性。
地震道的空間組合模式如下:
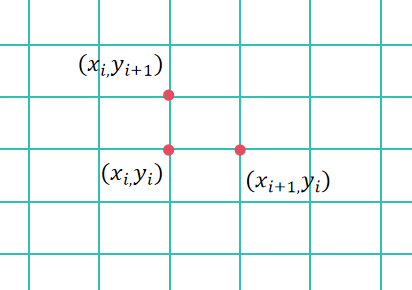
在縱測線方向 t t t時刻計算歸一化互相關(時間窗口為 2 ω 2\omega 2ω):
C 12 ( t , p , x i , y i ) = ∑ τ = ? ω + ω u ( t ? τ , x i , y i ) u ( t ? τ ? p , x i + 1 , y i ) ∑ τ = ? ω + ω u 2 ( t ? τ , x i , y i ) u 2 ( t ? τ ? p , x i + 1 , y i ) C_{12}(t,p,x_i,y_i) = \frac{\sum\limits_{\tau = - \omega}^{+\omega}u(t-\tau,x_i,y_i)u(t-\tau-p,x_{i+1},y_i)}{\sqrt{\sum\limits_{\tau = - \omega}^{+\omega}u^2(t-\tau,x_i,y_i)u^2(t-\tau-p,x_{i+1},y_i)}} C12?(t,p,xi?,yi?)=τ=?ω∑+ω?u2(t?τ,xi?,yi?)u2(t?τ?p,xi+1?,yi?)?τ=?ω∑+ω?u(t?τ,xi?,yi?)u(t?τ?p,xi+1?,yi?)?
在橫測線方向 t t t時刻計算歸一化互相關:
C 13 ( t , q , x i , y i ) = ∑ τ = ? ω + ω u ( t ? τ , x i , y i ) u ( t ? τ ? q , x i , y i + 1 ) ∑ τ = ? ω + ω u 2 ( t ? τ , x i , y i ) u 2 ( t ? τ ? q , x i , y i + 1 ) C_{13} (t,q,x_i,y_i)= \frac{\sum_{\tau = - \omega}^{+\omega}u(t-\tau,x_i,y_i)u(t-\tau-q,x_{i},y_{i+1})}{\sqrt{\sum_{\tau = - \omega}^{+\omega}u^2(t-\tau,x_i,y_i)u^2(t-\tau-q,x_i,y_{i+1})}} C13?(t,q,xi?,yi?)=∑τ=?ω+ω?u2(t?τ,xi?,yi?)u2(t?τ?q,xi?,yi+1?)?∑τ=?ω+ω?u(t?τ,xi?,yi?)u(t?τ?q,xi?,yi+1?)?
沿視傾角 ( p , q ) (p,q) (p,q)的相干值 C 1 C_1 C1?為:
C 1 ( p , q ) = [ C 12 ( C 11 C 22 ) 1 2 C 13 ( C 11 C 33 ) 1 2 ] 1 2 C_1(p,q) = [\frac{C_{12}}{(C_{11}C_{22})^{\frac{1}{2}}} \frac{C_{13}}{(C_{11}C_{33})^{\frac{1}{2}}}]^{\frac{1}{2}} C1?(p,q)=[(C11?C22?)21?C12??(C11?C33?)21?C13??]21?
其中, C i i C_{ii} Cii?為第 i i i道的自相關量; C i j C_{ij} Cij?為第 i i i道和第 j j j道的互相關量。視傾角 ( p , q ) (p,q) (p,q)中 p p p和 q q q分別為 x x x方向和 y y y方向上的地震道之間的時移量。
特點:
- 第一代相干體技術只取了三道地震數據來計算,因此處理速度較快,但該方法的抗噪能力較差,計算的結果存在較多雪花狀干擾,同時對于大傾角的裂縫及斷層檢測效果較差。
- 三點互相關算法假設地震道是零平均信號,當相關時窗長度超過地震子波長度時,這種假設才基本成立,即要求窗口大于地震反射的最長周期,但這樣降低了計算得到的相干體數據的垂向分辨率。
第二代相干體技術:基于相似的相干體技術(Semblance)
基于多道相似的相干體技術
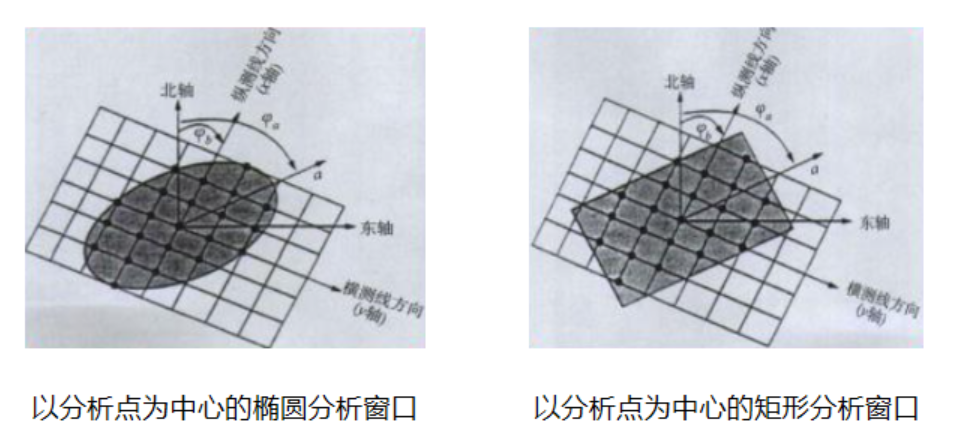
定義一個以分析點為中心的包含 J J J道的橢圓或矩形分析時窗,則相干值 C 2 C_2 C2?為分析時窗內平均道的能量與所有道的能量比,計算為:
C 2 ( t , p , q ) = ∑ k = ? K + K [ 1 J ∑ j = 1 J u j ( t + k Δ t ? p x j ? p y j ) ] 2 ∑ k = ? K + K 1 J [ ∑ j = 1 J u j ( t + k Δ t ? p x j ? p y j ) ] 2 C_2(t,p,q) = \frac{\sum\limits_{k = -K}^{+K}[\frac{1}{J}\sum\limits_{j=1}^{J}{u_j(t+k\Delta t - px_j-py_j)}]^2}{\sum\limits_{k = -K}^{+K}\frac{1}{J}[\sum\limits_{j=1}^{J}{u_j(t+k\Delta t - px_j-py_j)}]^2} C2?(t,p,q)=k=?K∑+K?J1?[j=1∑J?uj?(t+kΔt?pxj??pyj?)]2k=?K∑+K?[J1?j=1∑J?uj?(t+kΔt?pxj??pyj?)]2?
上式中,下標 j j j表示落在分析時窗內的第 j j j道; x j x_j xj?和 y j y_j yj?表示第 j j j道與分析時窗內中心點 t t t在 x x x和 y y y方向的舉例; p p p和 q q q分別表示分析時窗內中心點,所在局部反射界面 x x x和 y y y方向的視傾角。
特點:
- 可以對任意多道地震數據計算相干性,能夠較精準地計算有噪聲數據的相干性、傾角和方位角;
- 用一個適當大小的分析窗口,能較好地解決提高分辨率和提高信噪比之間的矛盾;
- 因此,基于多道相似的相干體技術具有較好的適用性和分辨女,而且具有相當快的計算速度。
基于曼哈頓(Manhattan)距離的波形相似性算法
對于地震數據體中的相干計算道,設 G G G為中心道, H H H為相鄰道,定義歸一化的曼哈頓距離計算公式為
M d = ∑ k = N ? n / 2 k = N + n / 2 ∣ G k ? H k + d ∣ ∑ k = N ? n / 2 k = N + n / 2 ( ∣ G k ∣ + ∣ H k + d ∣ ) M_d = \frac{\sum\limits_{k=N-n/2}^{k=N+n/2}|G_k - H_{k+d}|}{\sum\limits_{k=N-n/2}^{k=N+n/2}(|G_k| + |H_{k+d}|)} Md?=k=N?n/2∑k=N+n/2?(∣Gk?∣+∣Hk+d?∣)k=N?n/2∑k=N+n/2?∣Gk??Hk+d?∣?
上式中, M d M_d Md?為歸一化曼哈頓距離距離, n n n為相關時窗長度(樣點數), d d d為地層傾斜時的時間延遲值, N N N為中心道 G G G相關時窗的時間樣點值。在始終當中心道 G G G與相鄰道 H H H相同時, M d M_d Md?等于零;當中心道 G G G與相鄰道 H H H完全不想死即極性相反時, M d M_d Md?等于1;其他情況下, M d M_d Md?的值介于0到1之間。
特點:
- 基于歸一化的曼哈頓距離的相干算法只涉及兩個隨機信號的加減運算,不涉及普通相干計算中的兩個隨機信號的乘積運算,因此具有較高的運算效率。
基于復地震道的相干體技術
如果在小的垂向時窗內應用于基于多道相抵的相干體算法,在計算零值附近同相軸的相干體時會造成一些假象,一旦地震信號的振幅低于背景噪音,相干算法將識別為地震數據不相干,將產生低相干的假象。應用復地震道技術可以解決這個問題,對應的相干體計算公式為:
C H ( t , p , q ) = ∑ k = ? K + K { [ 1 J ∑ j = 1 J u j ( t + k Δ t ? p x j ? q y j ) ] 2 + ∑ k = ? K + K [ 1 J ∑ j = 1 J u j H ( t + k Δ t ? p x j ? q y j ) ] 2 } ∑ k = ? K + K 1 J ∑ j = 1 J { [ u j ( t + k Δ t ? p x j ? q y j ) ] 2 + [ u j H ( t + k Δ t ? p x j ? q y j ) ] 2 } C_H(t,p,q) = \frac{\sum\limits_{k=-K}^{+K}{\left \{\left[\frac{1}{J}\sum\limits_{j=1}^{J}u_j(t+k\Delta t -px_j -qy_j)\right]^2 +\sum\limits_{k=-K}^{+K}\left[\frac{1}{J}\sum\limits_{j=1}^{J}u_j^H(t+k\Delta t -px_j -qy_j)\right]^2\right \}}}{\sum\limits_{k=-K}^{+K}\frac{1}{J}\sum\limits_{j=1}^{J}\left \{\left[ u_j(t+k\Delta t -px_j -qy_j)\right]^2+\left[ u_j^H(t+k\Delta t -px_j -qy_j)\right]^2\right\}} CH?(t,p,q)=k=?K∑+K?J1?j=1∑J?{[uj?(t+kΔt?pxj??qyj?)]2+[ujH?(t+kΔt?pxj??qyj?)]2}k=?K∑+K?? ? ??[J1?j=1∑J?uj?(t+kΔt?pxj??qyj?)]2+k=?K∑+K?[J1?j=1∑J?ujH?(t+kΔt?pxj??qyj?)]2? ? ???
上式中,上標 H H H表示地震數據的希爾伯特征變換或正交地震道。當地震道的數據為零時,其對應的正交地震道數據的量值最大;當正交地震道的數據為零時,其實際地震數據的量值最大,這樣相干體的算法就比較穩定,保真性好。
先寫道這兒,有好多相關術語,看得我云里霧里的,灰溜溜地補地震勘探基礎去了
參考
地震相干體技術分析;
基于Windows的三維可視化地震資料解釋系統_李更想;
基于地震相干體數據的裂縫及斷層檢測方法研究_廖龍;




智能鍵盤項目深度剖析:從0到1的全流程解讀)

)
:Python腳本中使?PaddleOCR)











