地磁導航利用地球磁場的自然特性,通過感知磁場變化,幫助機器人或無人設備實現定位和導航。相比于 GPS、激光雷達等導航方法,地磁導航具有以下優勢:
- 低成本:使用地磁傳感器(如電子羅盤),硬件成本低,適合大規模部署。
- 全天候:不受天氣或光線條件的限制,適合室內外環境。
- 隱蔽性:無需外部信號支持,適應復雜或對隱蔽性要求較高的場景。
文章目錄
- 背景與研究意義
- 研究目標
- 技術路線
- 關鍵公式
- MATLAB代碼示例
- 代碼說明
- 課題價值
背景與研究意義
然而,地磁導航也面臨一些挑戰,例如環境磁場的時空變化、磁干擾的影響以及傳感器噪聲等。因此,研究基于低成本地磁傳感器的魯棒導航方法具有重要的理論和實踐意義,尤其在室內定位、安防巡檢和機器人導航中具有廣泛的應用前景。
研究目標
本課題的目標是研究一種基于地磁特征的低成本導航方法,主要包括以下內容:
- 地磁特征建模:通過采集環境地磁數據,建立地磁特征地圖。
- 定位與匹配算法:利用地磁傳感器讀取的實時數據,結合地磁特征地圖,實現魯棒的定位與導航。
- 抗干擾設計:針對地磁噪聲和干擾問題,設計濾波算法提高導航精度。
技術路線
-
地磁特征建模:
- 利用地磁傳感器采集環境磁場強度數據,記錄三維磁場分量( B x B_x Bx?, B y B_y By?, B z B_z Bz?)。
- 建立地磁特征地圖 M ( x , y ) \mathbf{M}(x, y) M(x,y),以空間位置 ( x , y ) (x, y) (x,y) 為索引,存儲對應的磁場特征向量。
-
實時定位與匹配:
- 根據傳感器實時讀取的磁場向量 B r e a l = [ B x , B y , B z ] \mathbf{B}_{real} = [B_x, B_y, B_z] Breal?=[Bx?,By?,Bz?],與特征地圖中的磁場特征向量 B m a p \mathbf{B}_{map} Bmap? 計算相似性:
相似性 = 1 ? ∥ B r e a l ? B m a p ∥ ∥ B m a p ∥ \text{相似性} = 1 - \frac{\|\mathbf{B}_{real} - \mathbf{B}_{map}\|}{\|\mathbf{B}_{map}\|} 相似性=1?∥Bmap?∥∥Breal??Bmap?∥? - 通過搜索特征地圖,確定最匹配的位置 ( x , y ) (x, y) (x,y)。
- 根據傳感器實時讀取的磁場向量 B r e a l = [ B x , B y , B z ] \mathbf{B}_{real} = [B_x, B_y, B_z] Breal?=[Bx?,By?,Bz?],與特征地圖中的磁場特征向量 B m a p \mathbf{B}_{map} Bmap? 計算相似性:
-
抗干擾設計:
- 應用卡爾曼濾波或滑動窗口濾波,降低傳感器數據中的高頻噪聲。
- 使用基于多點匹配的加權平均方法,增強定位魯棒性。
關鍵公式
-
地磁特征向量:
B ( x , y ) = [ B x , B y , B z ] \mathbf{B}(x, y) = [B_x, B_y, B_z] B(x,y)=[Bx?,By?,Bz?]
其中, B x B_x Bx?, B y B_y By?, B z B_z Bz? 分別為測得的地磁場在三個軸上的分量。 -
相似性計算:
S ( x , y ) = 1 ? ∥ B r e a l ? B ( x , y ) ∥ ∥ B ( x , y ) ∥ S(x, y) = 1 - \frac{\|\mathbf{B}_{real} - \mathbf{B}(x, y)\|}{\|\mathbf{B}(x, y)\|} S(x,y)=1?∥B(x,y)∥∥Breal??B(x,y)∥?
當 S ( x , y ) S(x, y) S(x,y) 的值最大時,認為當前位置與 ( x , y ) (x, y) (x,y) 最匹配。 -
卡爾曼濾波:
- 狀態預測:
x k ∣ k ? 1 = F x k ? 1 + w k ? 1 \mathbf{x}_{k|k-1} = \mathbf{F} \mathbf{x}_{k-1} + \mathbf{w}_{k-1} xk∣k?1?=Fxk?1?+wk?1? - 狀態更新:
x k ∣ k = x k ∣ k ? 1 + K k ( z k ? H x k ∣ k ? 1 ) \mathbf{x}_{k|k} = \mathbf{x}_{k|k-1} + \mathbf{K}_k \left( \mathbf{z}_k - \mathbf{H} \mathbf{x}_{k|k-1} \right) xk∣k?=xk∣k?1?+Kk?(zk??Hxk∣k?1?) - 卡爾曼增益:
K k = P k ∣ k ? 1 H T ( H P k ∣ k ? 1 H T + R ) ? 1 \mathbf{K}_k = \mathbf{P}_{k|k-1} \mathbf{H}^T \left( \mathbf{H} \mathbf{P}_{k|k-1} \mathbf{H}^T + \mathbf{R} \right)^{-1} Kk?=Pk∣k?1?HT(HPk∣k?1?HT+R)?1
- 狀態預測:
MATLAB代碼示例
% 基于地磁特征匹配的低成本導航
clear; clc; close all;
rng(0);
%% 1. 地磁特征地圖生成
% 假設地圖大小為10x10,隨機生成每個點的地磁特征
mapSize = 10; % 地圖大小
Bx = rand(mapSize, mapSize) * 50; % X方向磁場分量
By = rand(mapSize, mapSize) * 50; % Y方向磁場分量
Bz = rand(mapSize, mapSize) * 50; % Z方向磁場分量% 地磁特征地圖存儲為矩陣
magneticMap = sqrt(Bx.^2 + By.^2 + Bz.^2); % 磁場強度%% 2. 模擬真實傳感器讀取的磁場數據
% 假設真實位置為 (5, 5),讀取其磁場特征
realPosition = [5, 5];
realBx = Bx(realPosition(1), realPosition(2));
realBy = By(realPosition(1), realPosition(2));
realBz = Bz(realPosition(1), realPosition(2));
realMagnetic = sqrt(realBx^2 + realBy^2 + realBz^2);% 添加噪聲
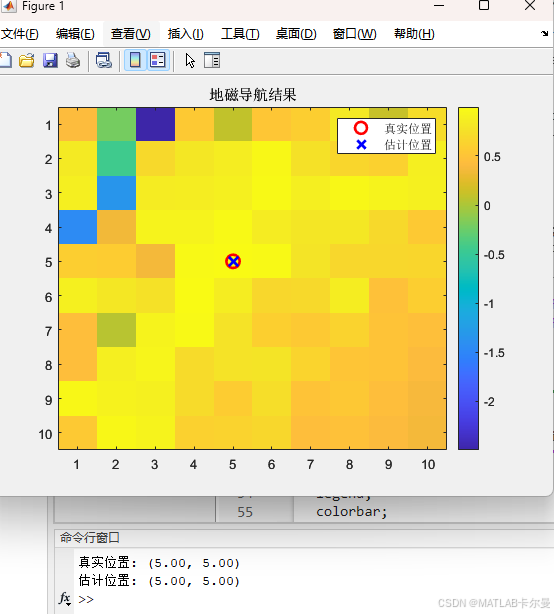
完整代碼的運行結果:
代碼說明
-
地磁特征地圖生成:
- 使用隨機值模擬一個大小為
10x10的地磁特征地圖,每個點的磁場強度由 B x B_x Bx?, B y B_y By?, B z B_z Bz? 組成。
- 使用隨機值模擬一個大小為
-
傳感器數據模擬:
- 在真實位置處采集地磁數據,并添加高斯噪聲模擬傳感器的不確定性。
-
定位算法:
- 通過計算傳感器數據與地圖中每個點的地磁特征相似性,找到相似性最大的點作為估計位置。
-
可視化:
- 繪制相似性分布圖,并標注真實位置和估計位置。
課題價值
本課題不僅能夠降低導航系統的硬件成本,還能在 GPS 信號失效或復雜環境中提供可靠的導航方案。結合地磁特征建模與抗噪算法,可進一步提高系統的魯棒性和精度,為服務機器人、物流無人車和安防巡邏等領域提供重要技術支撐。
如需幫助,或有導航、定位濾波相關的代碼定制需求,請點擊下方卡片聯系作者










毛子整潔架構(Infrastructure層/DapperHelper/樂觀鎖))






—— FFmpeg 內存模型)

