簡介
無人機飛控算法是實現穩定飛行和精確控制的核心技術,涉及飛行動力學建模、傳感器數據處理、狀態估計和控制策略等多個環節。本實戰指南將系統講解四旋翼無人機飛控算法的開發流程,包括飛行動力學模型建立、傳感器校準與數據融合、主流控制算法實現(PID、ADRC、EKF)以及企業級飛控系統架構設計。通過結合開源飛控框架(如PX4)和實際工程經驗,提供完整的代碼實現示例,幫助學者從零開始掌握無人機飛控開發的核心技術。
一、飛控系統架構與開發環境
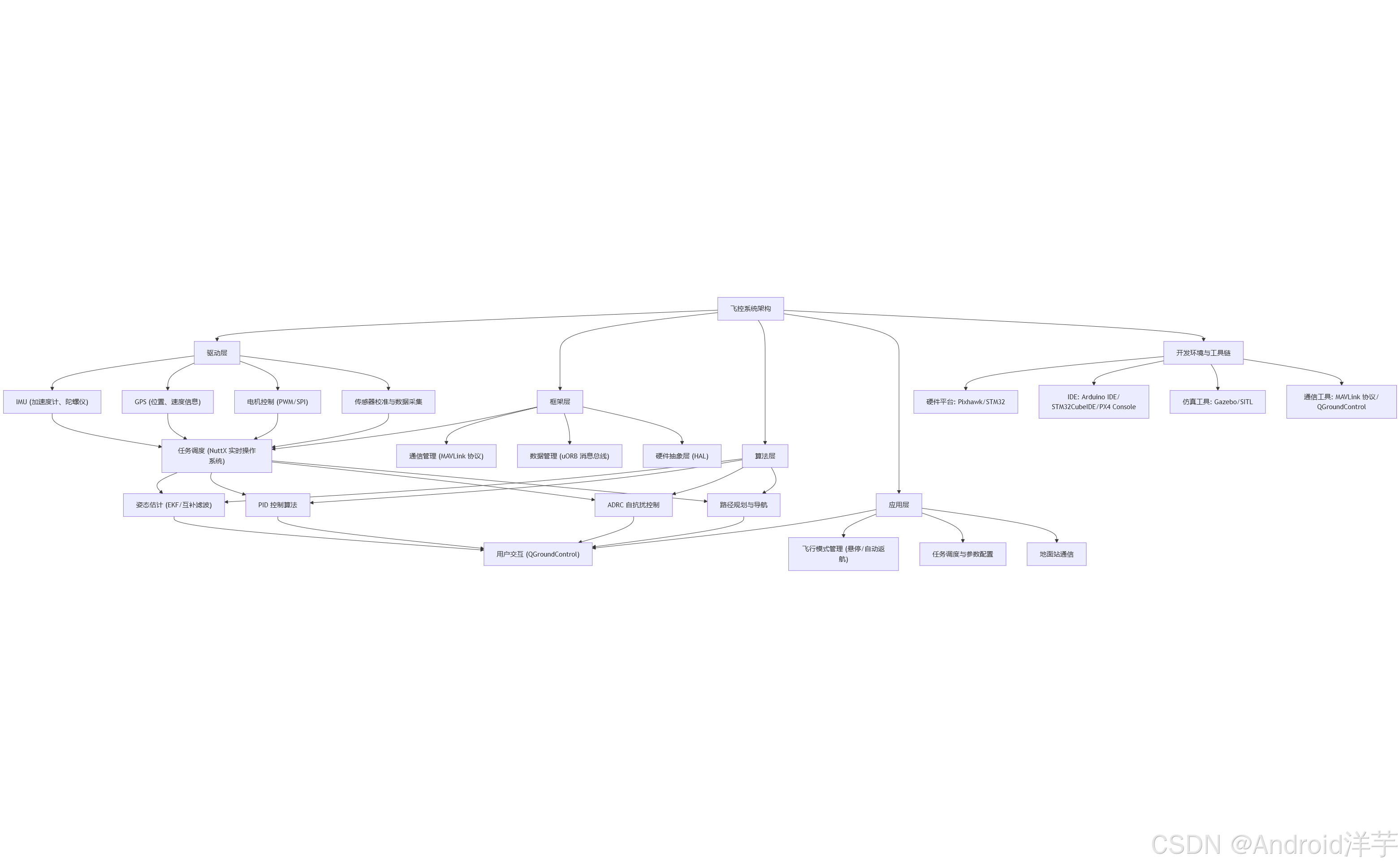
無人機飛控系統是一個復雜的嵌入式系統,需要將硬件驅動、狀態估計、控制算法和應用層功能有機結合。企業級飛控系統通常采用模塊化架構設計,分為驅動層、框架層、算法層和應用層,各層之間通過清晰的接口進行通信。驅動層負責與硬件設備(如IMU、GPS、電機等)交互;框架層提供任務調度、通信和數據管理等基礎服務;算法層實現核心控制算法;應用層則提供用戶交互和飛行模式管理功能。
開發環境選擇對飛控算法開發至關重要。開源飛控框架如PX4和ArduPilot提供了豐富的開發資源和成熟的架構設計。PX4基于NuttX實時操作系統,采用C/C++語言編寫,支持多種硬件平臺,是目前最流行的開源飛控系統。其模塊化設計使得開發者可以專注于特定功能模塊的開發,無需從零開始構建整個系統。ArduPilot則采用Arduino風格的C/C++,硬件抽象層(HAL)設計使得代碼在不同硬件平臺間移植較為容易。
飛控開發通常需要以下工具鏈:
- 硬件平臺:如Pixhawk系列飛控板或STM32開發板
- IDE:如Arduino IDE、STM32CubeIDE或PX4的專用開發環境
- 模擬工具:如Gazebo仿真環境或PX4的SITL(軟件在環)
- 通信工具:MAVLink協議解析工具或QGroundControl地面站
二、飛行動力學模型建立
飛控算法的基礎是準確的飛行動力學模型。對于四旋翼無人機,其運動可以用六自由度(6-DOF)剛體動力學模型描述,包括三個平移自由度(X, Y, Z)和三個旋轉自由度(滾轉φ、俯仰θ、偏航ψ)。動力學模型建立是飛控算法開發的第一步,它決定了后續控制算法的準確性。
四旋翼無人機的動力學模型由以下幾部分組成:
- 位置動力學:描述無人機在三維空間中的運動
\begin{cases}
\ddot{x} = \frac{U_1}{m} \left( \cos\phi \sin\theta \cos\psi + \sin\phi \sin\psi \right) \\
\ddot{y} = \frac{U_1}{m} \left( \cos\phi \sin\theta \sin\psi - \sin\phi \cos\psi \right) \\
\ddot{z} = \frac{U_1}{m} \cos\phi \cos\theta - g
\end{cases}- 姿態動力學:描述無人機繞質心的旋轉運動
\begin{cases}
I_x \dot{p} = \tau_\phi - \tau_\psi \tan\theta \\
I_y \dot{q} = \tau_\theta + \tau_\psi \frac{\sin\phi}{\cos\theta} \\
I_z \dot{r} = \tau_\psi
\end{cases}- 輸入力與力矩:由四個旋翼產生的總升力和力矩
\begin{cases}
U_1 = k_f \sum_{i=1}^4 \omega_i^2 \\
\tau_\phi = \frac{l}{2} k_m (\omega_2^2 + \omega_4^2 - \omega_1^2 - \omega_3^2) \\
\tau_\theta = \frac{l}{2} k_m (\omega_1^2 + \omega_4^2 - \omega_2^2 - \omega_3^2) \\
\tau_\psi = \frac{d}{2} k_m (\omega_1^2 - \omega_2^2 + \omega_3^2 - \omega_4^2)
\end{cases}其中,x,y,zx,y,z是無人機的位置;U1=F1+F2+F3+F4U1?=F1?+F2?+F3?+F4?是總升力;mm是無人機質量;gg是重力加速度;p,q,rp,q,r分別是橫滾、俯仰和偏航的角速度;?,θ,ψ?,θ,ψ分別是橫滾角、俯仰角和偏航角;ll是從中心到各推進裝置的距離;dd為反扭系數;wiwi?對應各個發動機所產生的角速度。
在實際開發中,動力學模型通常需要進行離散化處理,以便在嵌入式系統上實現。PX4開源飛控提供了完整的動力學模型實現,開發者可以基于此進行二次開發。四旋翼動力學模型的C++實現可參考PX4的src/lib/quadrotor_dynamics/quadrotor_dynamics.cpp文件。
三、傳感器原理與校準技術
無人機飛控依賴多種傳感器獲取飛行狀態信息。IMU(慣性測量單元)是飛控系統的核心傳感器,提供加速度和角速度數據。IMU通常包含三軸加速度計和三軸陀螺儀,部分高端型號還集成磁力計。加速度計測量無人機的線加速度,陀螺儀測量角速度,磁力計提供航向參考。這些傳感器數據需要經過校準和融合才能得到準確的無人機姿態和位置信息。
IMU校準是確保傳感器數據準確性的關鍵步驟。校準主要分為靜態校準和動態校準兩種:
- 靜態校準:在靜止狀態下進行,主要校正零偏
void MPU6050::calcOffsets(bool is_calc_gyro, bool is_calc_acc) {if(is_calc_gyro) setGyroOffsets(0,0,0);if(is_calc_acc) setAccOffsets(0,0,0);float ag[6];for(int i = 0; i < CALIB_OFFSET_NB_MES; i++) {this->fetchData();ag[0] += accX;ag[1] += accY;ag[2] += (accZ-1.0); // 假設設備靜止且Z軸向下ag[3] += gyroX;ag[4] += gyroY;ag[5] += gyroZ;delay(1);}if(is_calc_acc) {accXoffset = ag[0] / CALIB_OFFSET_NB_MES;






)

)





)
以及 Ctrl + Alt + l 全局格式化代碼的注釋縮進)


