官方GIthub下載:?https://github.com/google-deepmind/mujoco/releases
官網:MuJoCo — Advanced Physics Simulation? ? ? 文檔:Overview - MuJoCo Documentation
主要參考:Ubuntu 22.04 安裝Mujoco 3.22 - RobotStudent的文章 - 知乎
簡介
MuJoCo : Multi-Joint dynamics with Contact 表示:接觸的多關節動力學。
是一種免費的開源物理引擎,旨在促進機器人技術 robotics,生物力學 biomechanics,圖形和動畫以及需要快速準確模擬的其他領域的研發
下載
根據操作系統,選擇版本適配例如(mujoco-3.3.2-linux-x86_64.tar.gz)
解壓 (界面/ 命令)
tar -zxvf mujoco-3.3.2-linux-x86_64.tar.gz -C ./mujoco將bin文件添加到系統PATH路徑
# 將/home/zengxy/code/mujoco-3.3.2/路徑改為自己實際路徑
echo "export PATH=/home/zengxy/code/mujoco-3.3.2/bin:$PATH" >> ~/.bashrc # 立刻生效
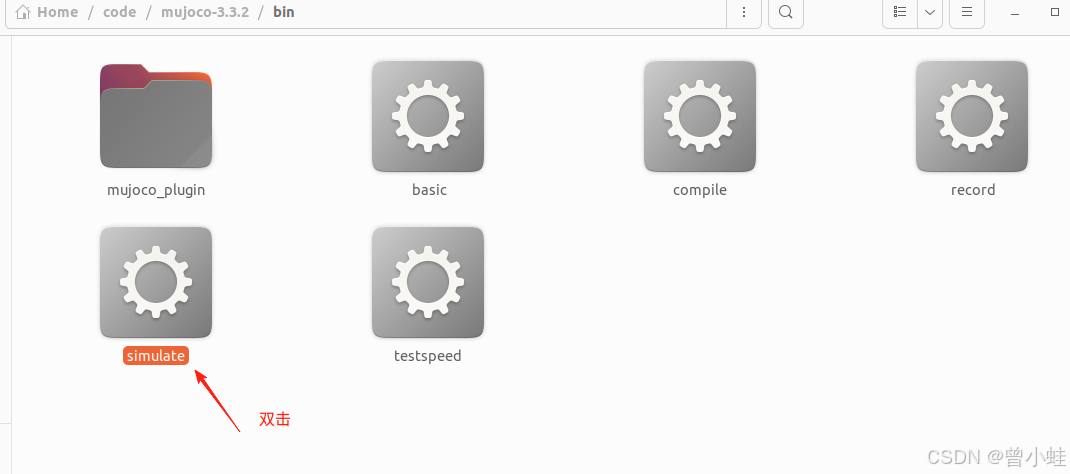
source ~/.bashrc # 或簡寫為 . ~/.bashrc啟動mujoco GUI
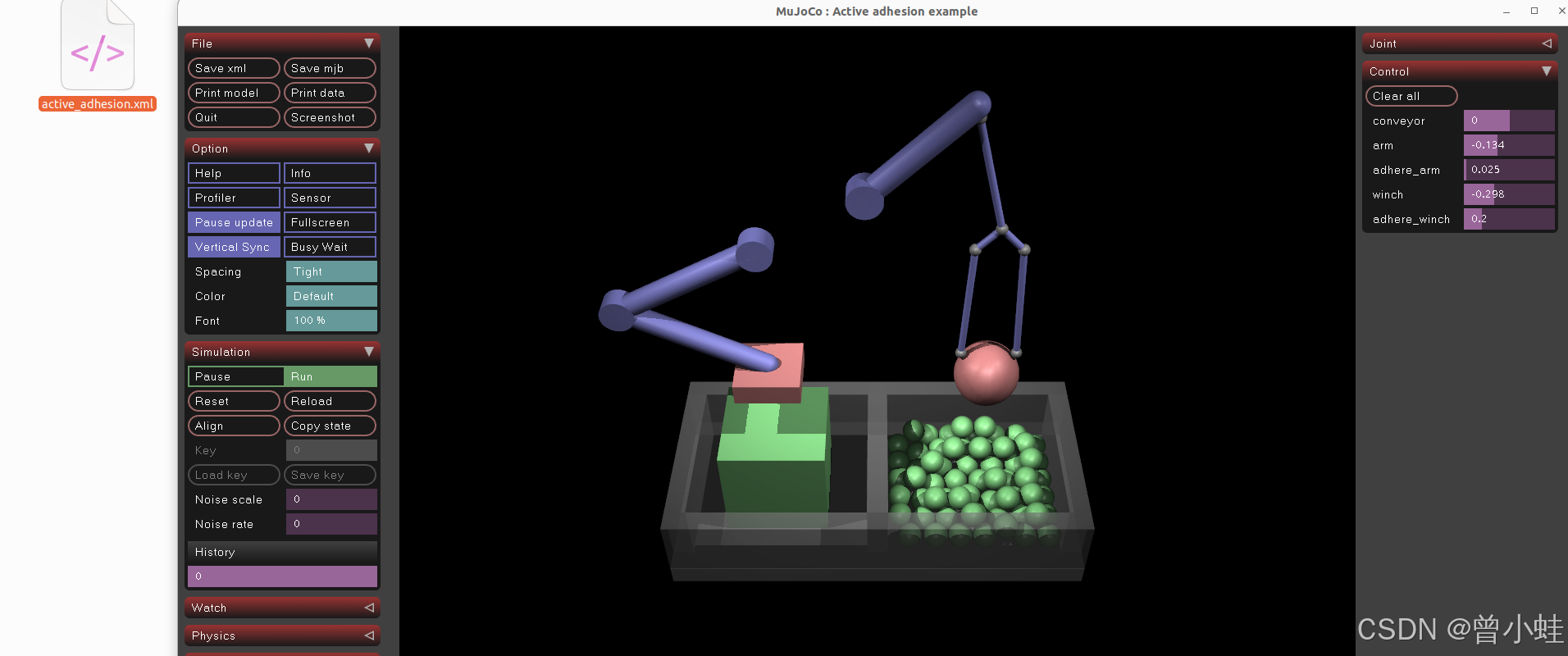
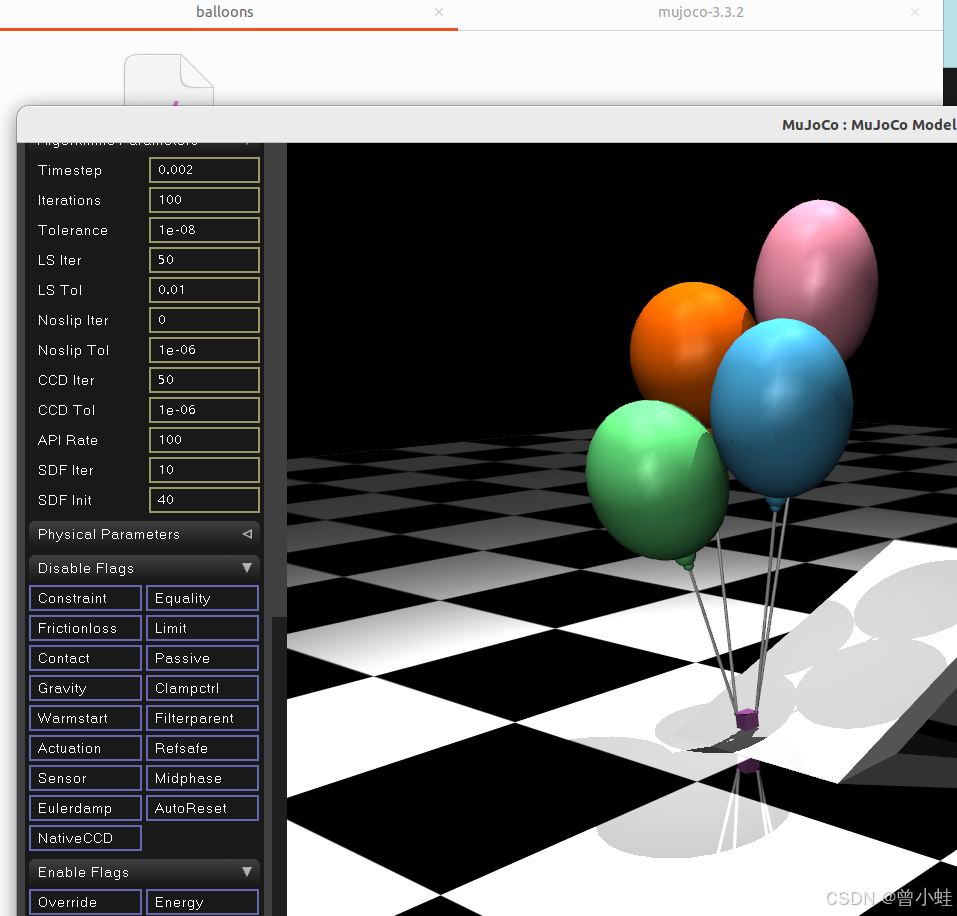
直接在Ui中啟動
在終端啟動
simulate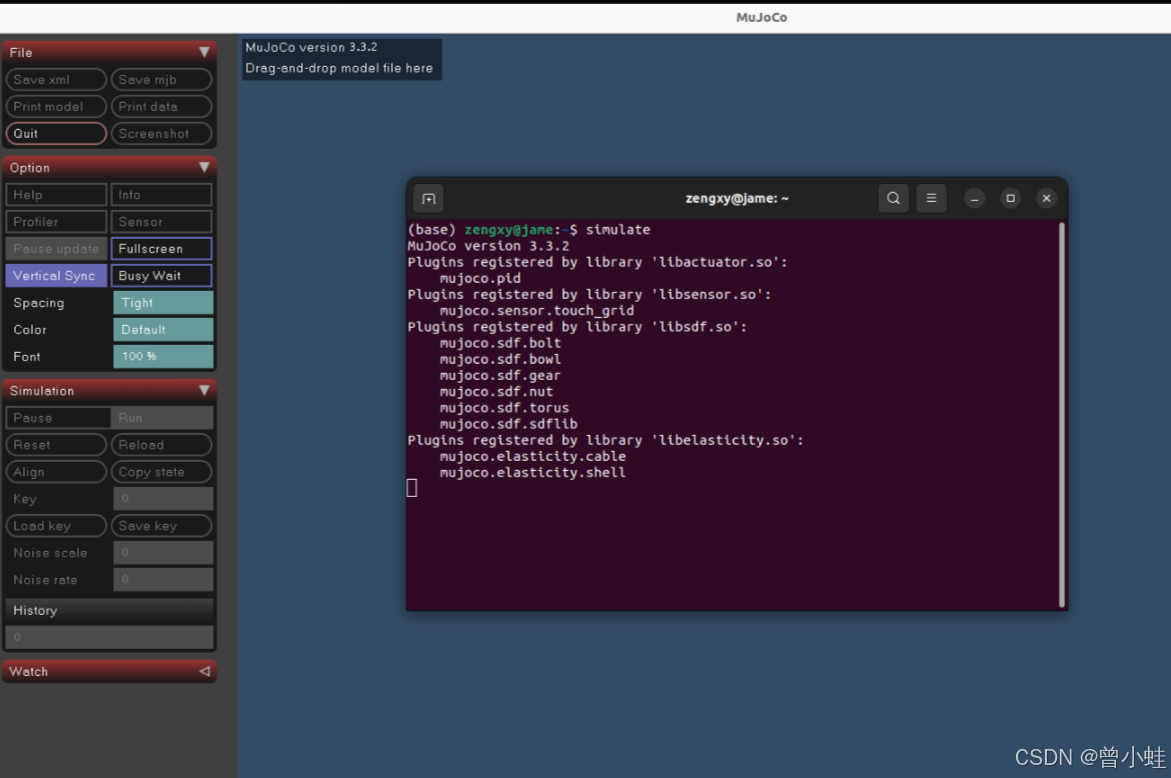
導入一個模型?:
直接拖入model文件夾里的 XML到mujoco界面
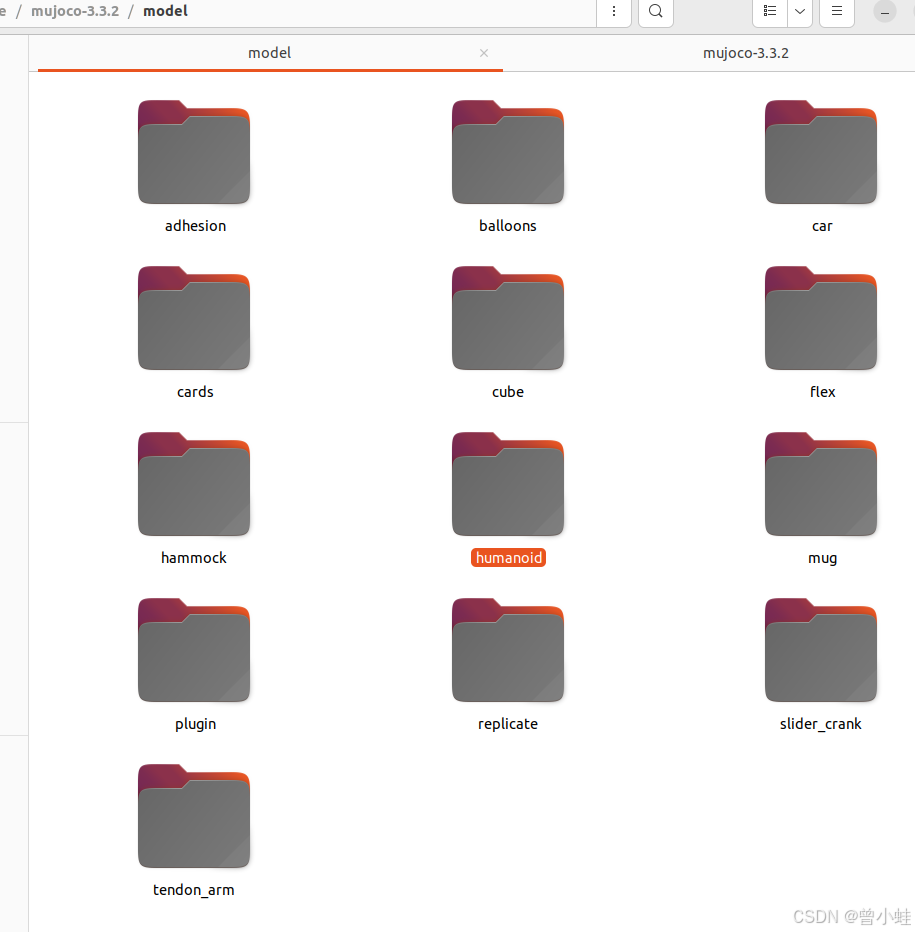
?humanoid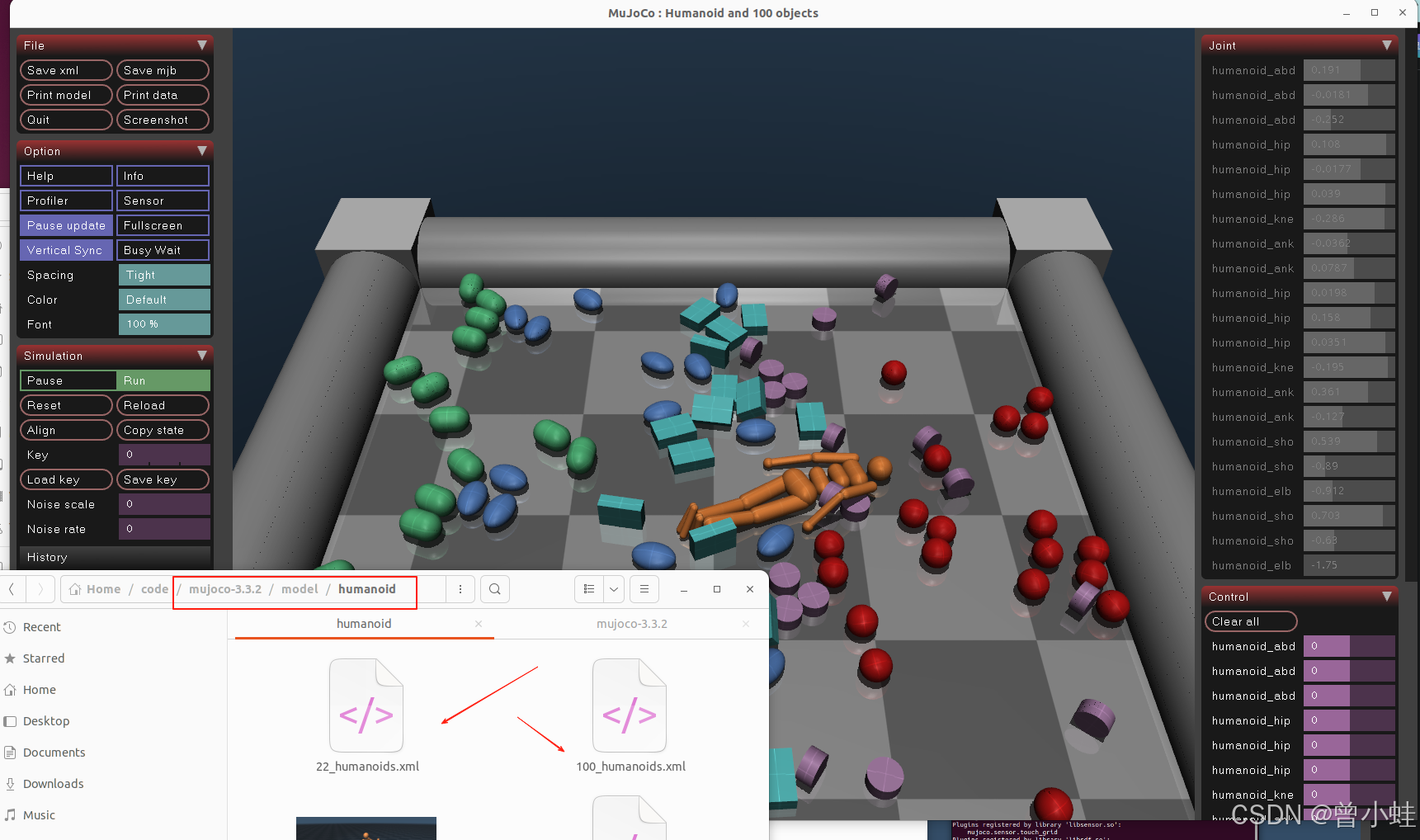
?








:生命周期)

反射的概念以及關鍵類Type)


)
 環境安裝)
:線性代數)



