隨著AI無人機集群逐步參與城市空域治理、物流服務與公共安全作業,其系統行為不再是“技術封閉域”,而需接受法規監管、責任評估與接口協同的多方審查。如何將AI集群系統推向標準化、可接入、可審計的合規體系,成為未來空中交通演進的關鍵。本文從接口協議、行為表征、責任可分、調度可信等維度,構建低空AI系統的“六層標準路徑”,并提出基于荷魯斯之眼與RT-AI平臺的標準化實踐經驗框架。
一、合規體系構建的必要性
1.1 城市級空域智能調度系統面臨三類風險:
- 無人系統行為不可見 → 安全不可控。 例如,若某架物流無人機在飛行中突發偏航但未及時上報至平臺,地面監管系統無法判定是否為規避策略還是系統故障。
- 多廠商系統行為不可交 → 無法協同。 當前多家無人機平臺使用自有調度協議,行為樹結構和策略定義不兼容,難以實現跨平臺聯動任務。
- 飛手與AI混合責任不清 → 無法仲裁。 一旦出現事故,平臺難以界定行為是由AI自動觸發還是飛手人工臨時干預,責任歸屬模糊。
?
1.2 標準化系統目標:“可集成、可驗證、可裁定”
- 技術上行為開放 → 行為可嵌入監管系統
- 法規上責任清晰 → 決策鏈可回溯
- 工程上結構明晰 → 接口協議可被調用
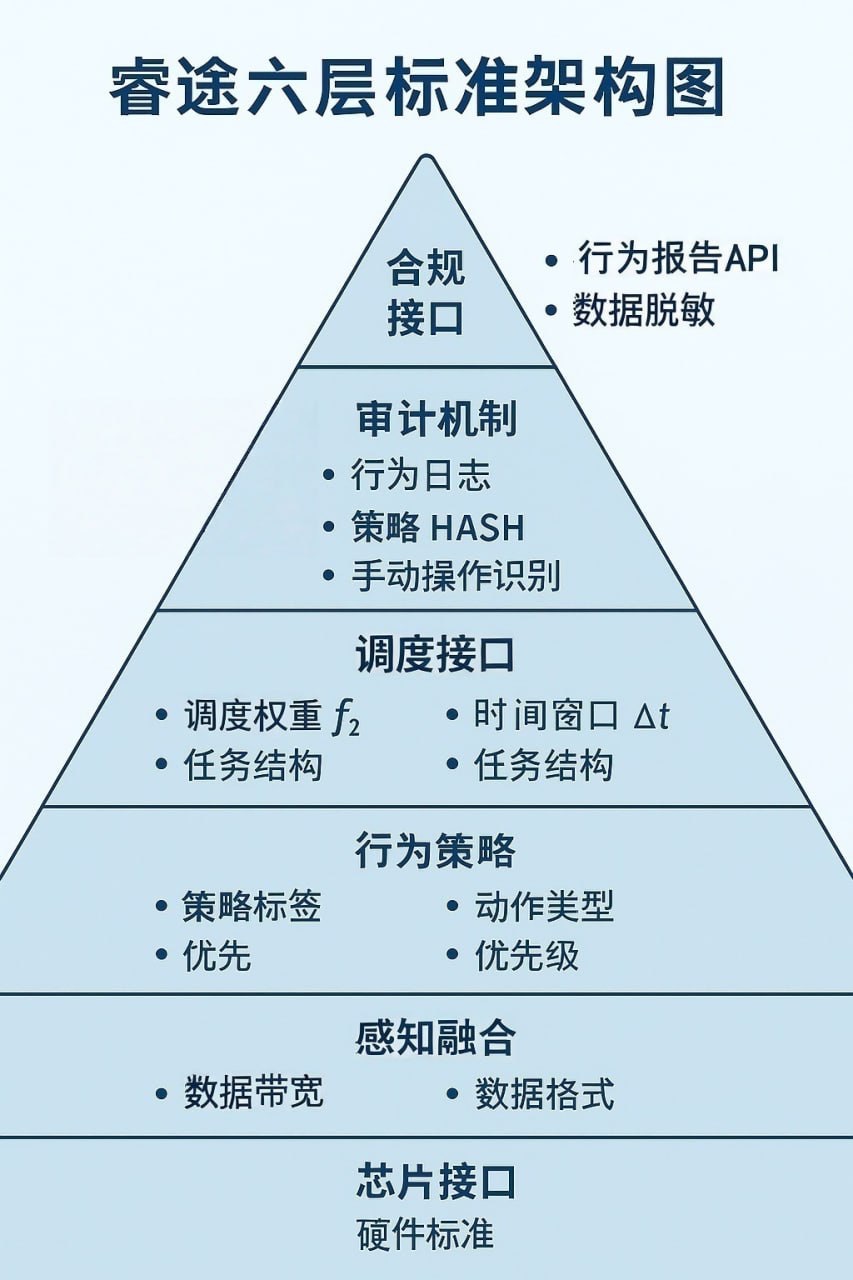
二、睿途六層標準路徑構建方案
2.1 第一層:硬件兼容標準
- 飛控芯片接口標準(荷魯斯之眼)
- 芯片日志輸出與同步編碼協議
?
2.2 第二層:基礎感知融合標準
- IMU+視覺+雷達數據格式標準
- 實時感知帶寬控制與壓縮協議
?
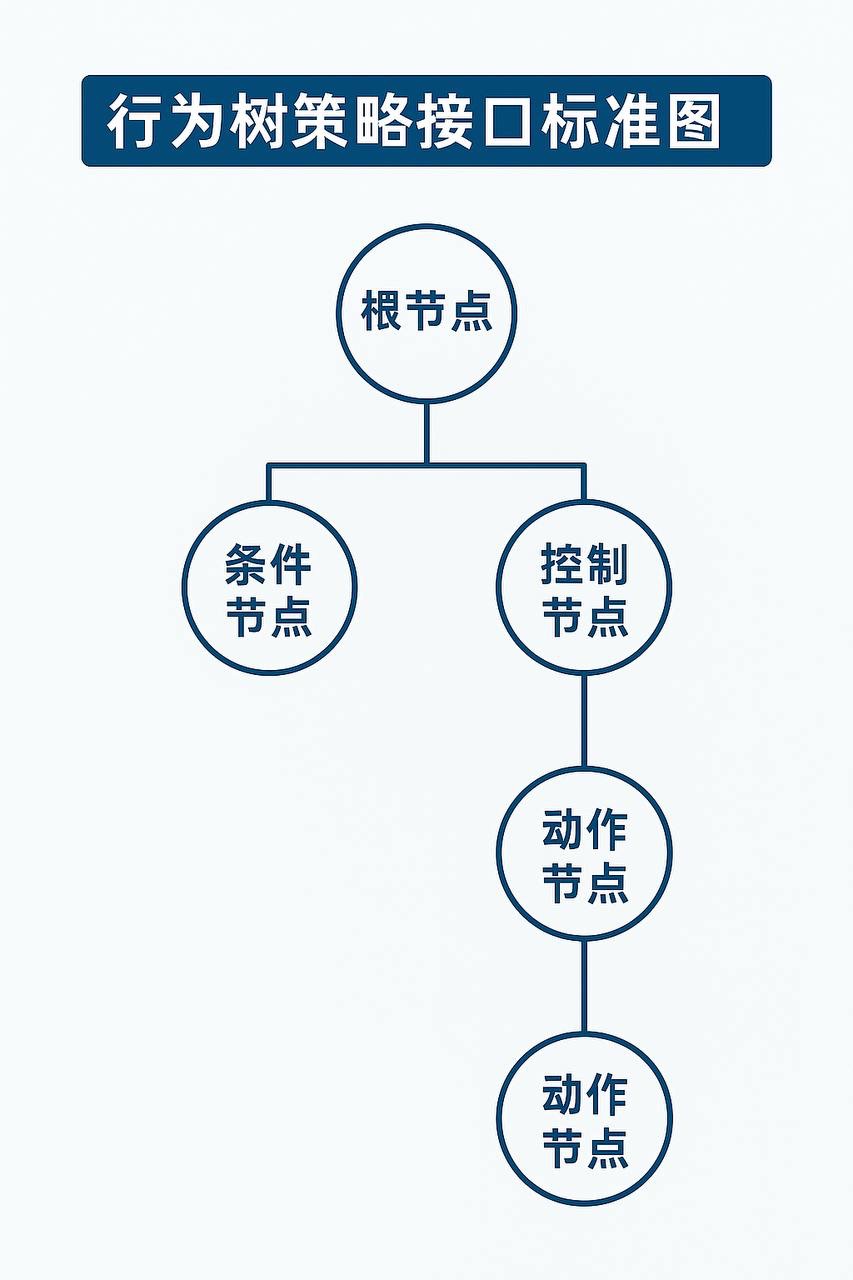
2.3 第三層:行為策略掛載標準
- 行為樹結構、節點層級定義、策略標簽標準
- 標簽包括動作類型(如避障/起飛/旋轉)、執行優先級、規避等級、觸發類型(基于感知/指令)等。
- 每一個策略節點均可嵌入決策可視接口,便于監管系統實時讀取路徑調用關系、觸發閾值與對應狀態。
?
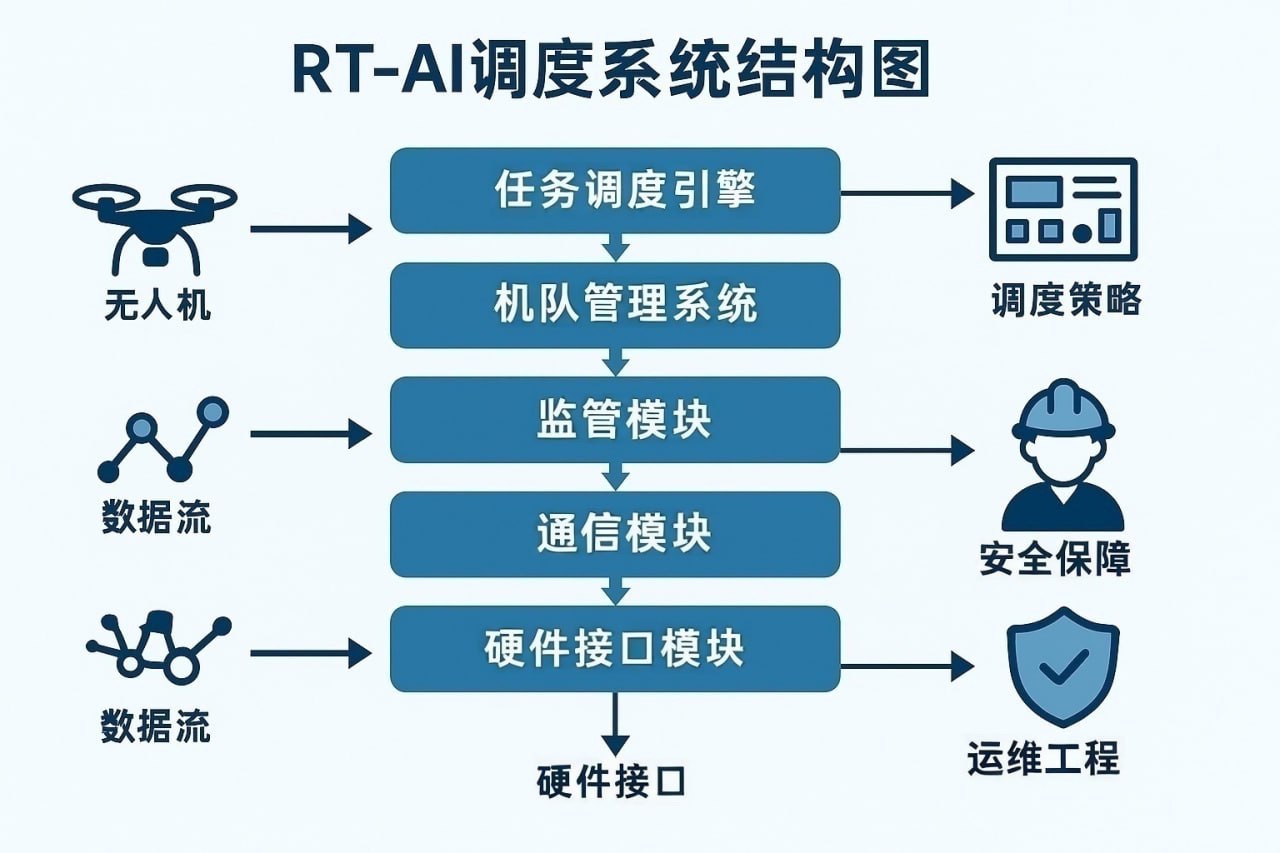
2.4 第四層:調度系統接口標準
- RT-AI Cluster任務下發結構體定義
- 調度權重字段、調度窗口接口協議(Δt/f2)
?
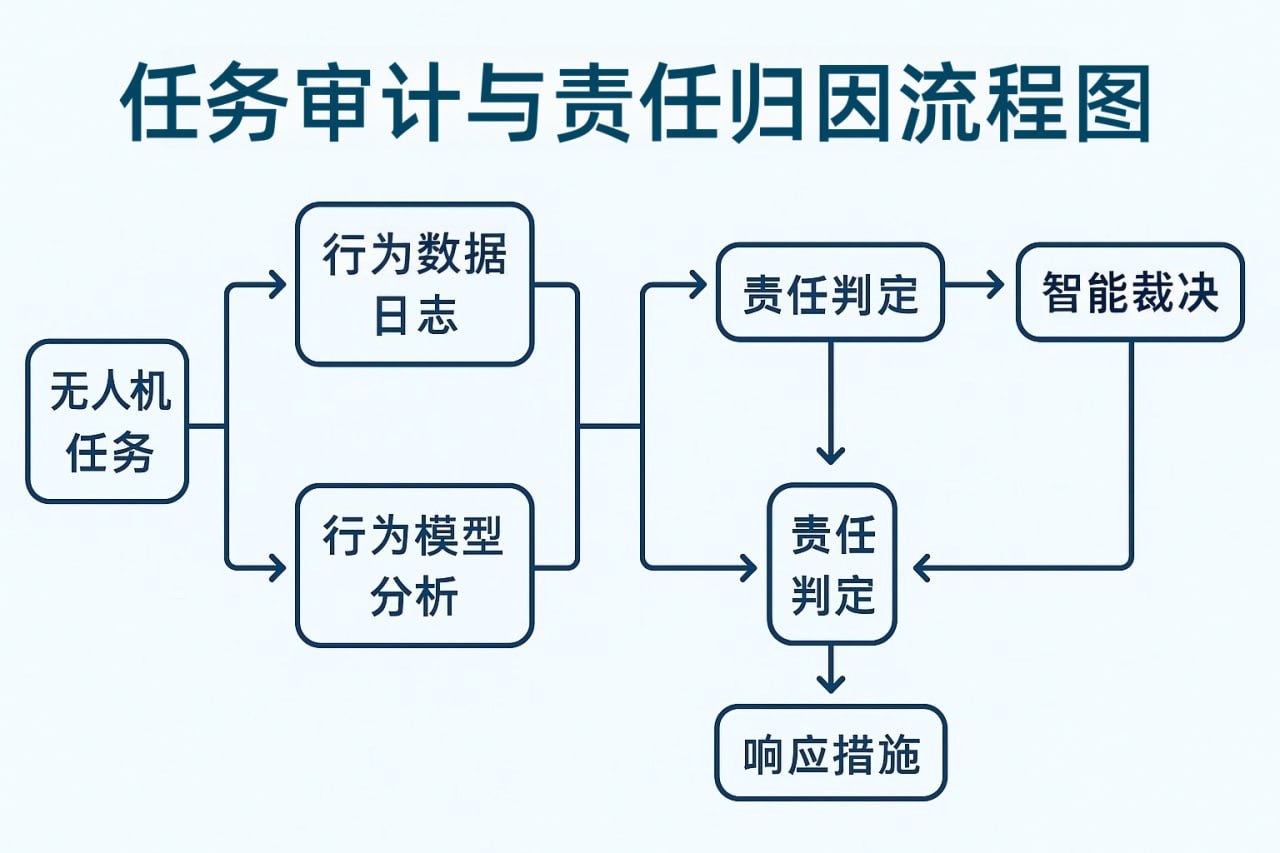
2.5 第五層:任務審計與責任歸因標準
- 策略行為日志格式(JSON+HASH),字段包含策略ID、狀態輸入、行為路徑、推理時間戳。
- 飛手介入標記機制通過行為日志中飛手輸入信號與推理觸發事件的時間戳進行交叉比對。
- 若飛手輸入信號出現在策略選擇前30ms以內,系統將自動標記為“人工介入”,并寫入審計記錄。
?
2.6 第六層:平臺級合規服務對接標準
- 向空域監管端同步接口(行為報告API)
- 合規數據訪問與抽查規范
- 支持數據脫敏、行為匿名化處理模塊
三、睿途標準化實踐樣板
3.1 荷魯斯之眼芯片標準封裝:接口可公開、時鐘可同步、行為可溯源
?
3.2 RT-AI平臺API文檔結構:
- 調度API(任務結構):支持批量任務并行下發、分片路徑定義、任務權重字段注入。
- 審計API(行為讀取+拒絕記錄):可按策略粒度拉取行為日志,支持JSON下載與可視化對比。
- 管理API(權限粒度 + 合規模式切換):支持基于飛手ID、機型ID或任務類型設定差異化管理權限。 例如:平臺管理員可設定“空中快遞”任務由專業飛手人工監督、“安防巡邏”任務允許AI全自動模式執行。
?
3.3 睿途合規適配路徑:
- 接入城市監管平臺:深圳城市低空監管體系測試
- 與第三方監管廠商接口共建標準試點
- 合規數據存證結構已支持法律仲裁備案格式
?
結語
未來的空域協同,將不再由人眼監管,而是由一套“嵌入式、實時性、責任閉環”的AI系統完成。 睿途的“六層標準路徑”——從飛控芯片到行為掛載、從調度接口到審計歸因,再到合規API接入——構建出一個“技術標準-法律合規-操作協同”三位一體的低空智能治理生態。 標準不是限制,而是賦予AI系統“被信任、被集成、被裁定”的能力基礎。

?










的 c_cpp_properties.json 文件內容)







)
