豬行為數據集包含 23 天(超過 6 周)的日間豬行為視頻,這些視頻由近乎架空的攝像機拍攝。視頻已配準顏色和深度信息。數據以每秒 6 幀的速度捕獲,并以 1800 幀(5 分鐘)為一批次進行存儲。大多數幀顯示 8 頭豬。
這里可以看到顏色和深度圖像的示例:
|
|
|

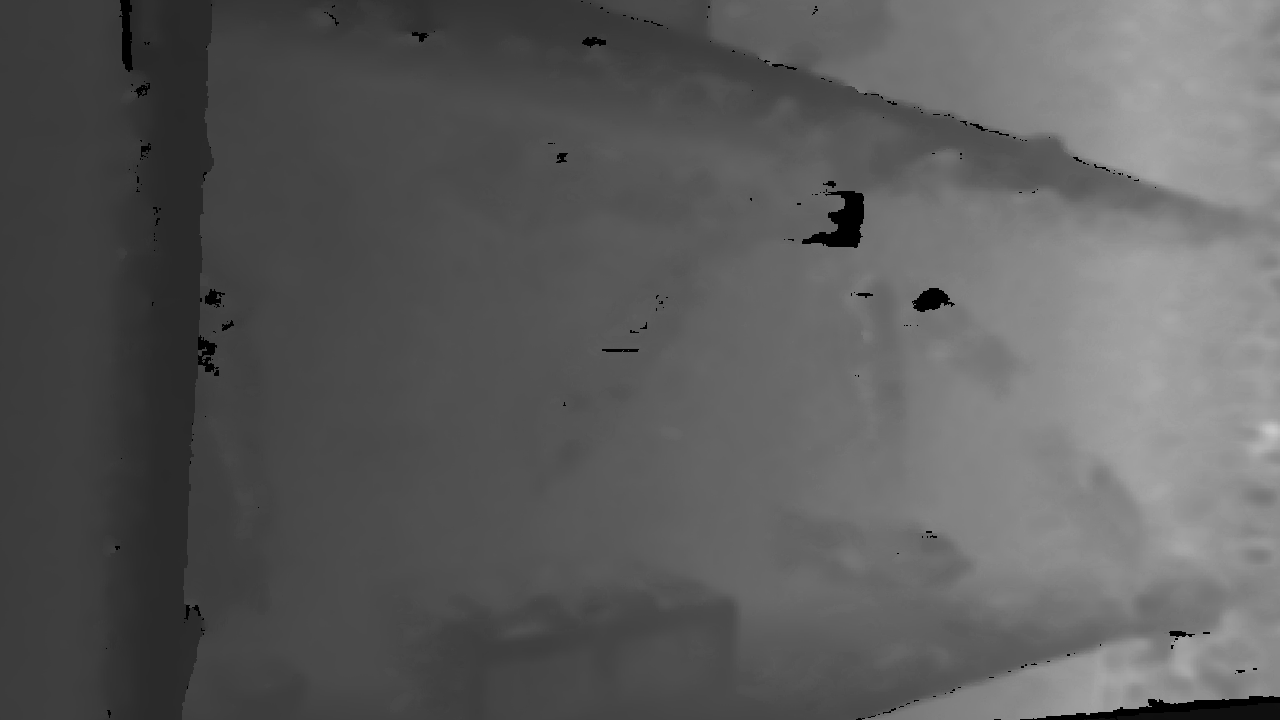
喂食器位于圖片底部中央,兩個水源分別位于豬圈的左下方(可見)和右下方(在圖片中豬的后方不可見)。總共捕獲了約 3,429,000 個數據幀。
更詳細的背景
數據集于 2019 年 11 月 5 日至 12 月 11 日(6 周)期間在 SRUC(蘇格蘭鄉村學院)研究豬場(英國愛丁堡附近)的一個豬圈(5.8mx 1.9m)內收集,豬圈內有 8 頭生長豬。研究開始時,豬為混養公母,體重約 30 公斤。它們被喂食一個三空間喂食器,其中自由采食商業豬飼料,兩個乳頭式飲水器和一個塑料濃縮裝置(Porcichew,East Riding Farm Services Ltd,英國約克郡),該裝置用鏈條懸掛在豬的高度(見頂部中心的黃色物體)。豬還在部分漏縫地板上喂食稻草和碎紙。使用距離地面 2.5 米的英特爾 RealSense D435i 攝像頭收集彩色圖像和深度數據。 RGB 和深度信息均以 6fps 的速度獲取,分辨率為 1280×720,并且由于夜間沒有人工光,因此獲取時間僅限于白天(上午 7 點至晚上 7 點)。
地面真實序列
其中 12 個序列已手動進行地面實況處理,包含軸對齊的邊界框、持久跟蹤標識符和行為標簽。標簽每隔三幅圖像添加一次,因此每個序列中有 600 個帶標簽的幀,總共 7200 個帶標簽的幀,每個幀包含 8 只帶標簽的豬。
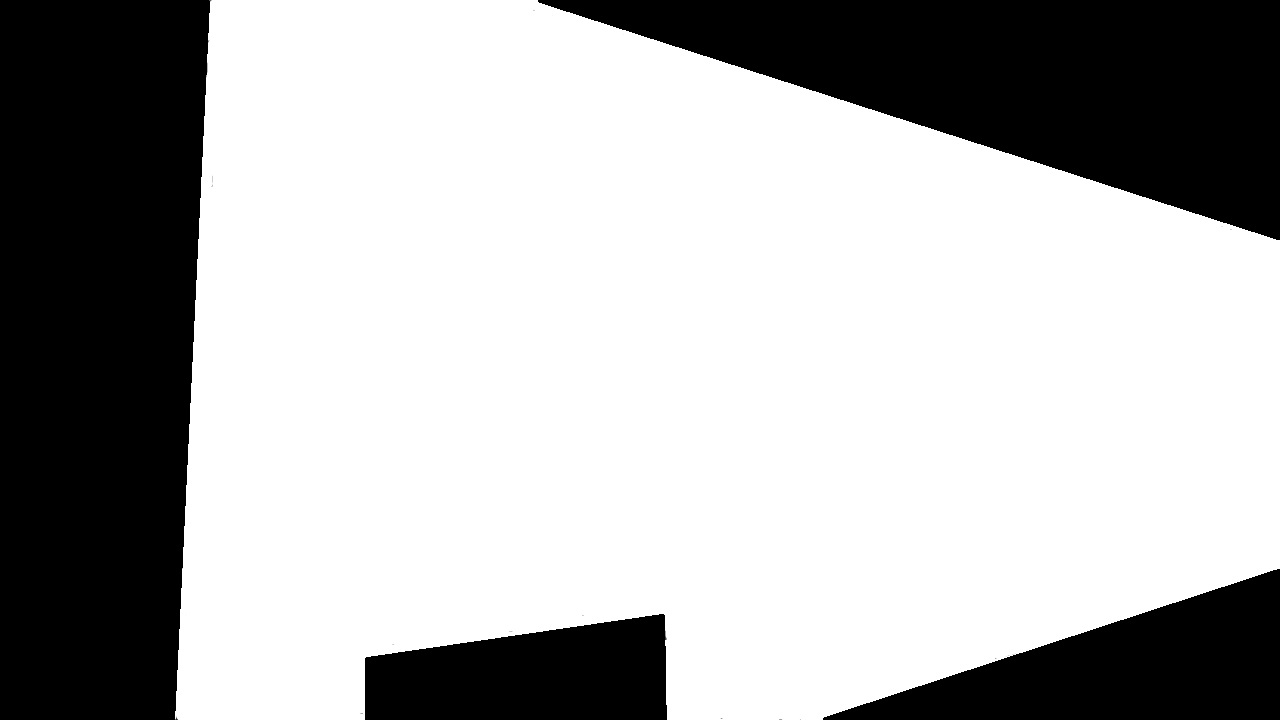
這里可以看到真實邊界框的示例,以及指示可用筆區域的mask.jpg掩碼文件:
|
|
|

真實數據文件位于 annotated.tar (3.2 GB) 中,每個序列對應一個文件夾。所有序列都與一個名為“CLIP”的文件夾關聯。真實數據片段如下:
| 日期 | 剪輯 |
|---|---|
| 2019年5月11日 | 000002, 000009 |
| 2019年11月11日 | 000016,000028,000036 |
| 2019年11月15日 | 000033 |
| 2019年11月22日 | 000010 |
| 2019年11月28日 | 000113 |
| 2019年2月12日 | 000005,000208 |
| 2019年10月12日 | 000060, 000078 |
每個 CLIP 文件夾包含:
- background.png - 視頻中的第一個彩色圖像幀
- background_depth.png - 視頻中的第一個深度圖像幀
- color.mp4 - 1800 幀注冊彩色視頻
- depth.mp4 - 1800 幀已注冊的深度視頻
- depth_scale.npy - 深度傳感器的像素值到厘米的縮放比例
- inverse_intrinsic.npy - 用于將深度點映射到 3D 點的相機固有參數的逆
- mask.png - 一個二進制掩碼,其中可用畫筆為 1,其他區域為 0。此文件不正確,請忽略。
- output.json - 地面實況邊界框和其他數據。請參閱下文“地面實況和檢測 JSON 文件格式”,了解地面實況文件格式。
- rot.npy - 相機的旋轉和平移參數。未使用。
- times.txt - 捕獲每一幀的日期和時間
源視頻文件
共有 25 個文件,涵蓋 23 個收集日。其中 23 個文件為 zip 文件,另 2 個為 tar 文件。您可以從以下位置下載:
| 日期 | 文件 | 大小 (GB) | 剪輯 | 剪輯 |
|---|




)



)




)



 工作原理)

