提示:文章寫完后,目錄可以自動生成,如何生成可參考右邊的幫助文檔
目錄
前言
unordered系列關聯式容器
unordered_map
unordered_map的文檔介紹
unordered_map的接口說明
unordered_set
底層結構
哈希概念
哈希沖突
哈希函數
哈希沖突解決
閉散列
線性探測的實現并改造
二次探測
開散列
開散列概念
開散列實現并改造 + 迭代器的實現
開散列增容
開散列與閉散列比較
不同的類型轉換成整型的操作
MyOrderedMap.h
MyOrderedSet.h
哈希的應用
位圖
位圖概念
位圖的實現
位圖應用
布隆過濾器
布隆過濾器提出
布隆過濾器概念
布隆過濾器的插入
布隆過濾器的查找
布隆過濾器刪除
布隆過濾器優點
布隆過濾器缺陷
布隆過濾器的面試題
哈希切割
總結
前言
世上有兩種耀眼的光芒,一種是正在升起的太陽,一種是正在努力學習編程的你!一個愛學編程的人。各位看官,我衷心的希望這篇博客能對你們有所幫助,同時也希望各位看官能對我的文章給與點評,希望我們能夠攜手共同促進進步,在編程的道路上越走越遠!
提示:以下是本篇文章正文內容,下面案例可供參考
unordered系列關聯式容器
在C++98中,STL提供了底層為紅黑樹結構的一系列關聯式容器,在查詢時效率可達到$log_2 N$,即最差情況下需要比較紅黑樹的高度次,當樹中的節點非常多時,查詢效率也不理想。最好 的查詢是,進行很少的比較次數就能夠將元素找到,因此在C++11中,STL又提供了4個 unordered系列的關聯式容器,這四個容器與紅黑樹結構的關聯式容器使用方式基本類似,只是其底層結構不同,本文中只對unordered_map和unordered_set進行介紹, unordered_multimap和unordered_multiset學生可查看文檔介紹。
unordered_map
unordered_map的文檔介紹
unordered_map文檔介紹
- unordered_map是存儲鍵值對的關聯式容器,其允許通過keys快速的索引到與其對應的value。
- 在unordered_map中,鍵值通常用于惟一地標識元素,而映射值是一個對象,其內容與此鍵關聯。鍵和映射值的類型可能不同。
- 在內部,unordered_map沒有對按照任何特定的順序排序,為了能在常數范圍內找到key所對應的value,unordered_map將相同哈希值的鍵值對放在相同的桶中。
- unordered_map容器通過key訪問單個元素要比map快,但它通常在遍歷元素子集的范圍迭 代方面效率較低。
- unordered_maps實現了直接訪問操作符(operator[]),它允許使用key作為參數直接訪問 value。
- 它的迭代器至少是前向迭代器。
unordered_map的接口說明
1. unordered_map的構造
| 函數聲明 | 功能介紹 |
| unordered_map | 構造不同格式的unordered_map對象 |
2. unordered_map的容量
| 函數聲明 | 功能介紹 |
| bool empty() const | 檢測unordered_map是否為空 |
| size_t size() const | 獲取unordered_map的有效元素個數 |
3. unordered_map的迭代器
| 函數聲明 | 功能介紹 |
| begin | 返回unordered_map第一個元素的迭代器 |
| end | 返回unordered_map最后一個元素下一個位置的迭代器 |
| cbegin | 返回unordered_map第一個元素的const迭代器 |
| cend | 返回unordered_map最后一個元素下一個位置的const迭代器 |
4. unordered_map的元素訪問
| 函數聲明 | 功能介紹 |
| operator[] | 返回與key對應的value,沒有一個默認值 |
注意:該函數中實際調用哈希桶的插入操作,用參數key與V()構造一個默認值往底層哈希桶中插入,如果key不在哈希桶中,插入成功,返回V(),插入失敗,說明key已經在哈希桶中, 將key對應的value返回。
5. unordered_map的查詢
| 函數聲明 | 功能介紹 |
| iterator find(const K& key) | 返回key在哈希桶中的位置 |
| size_t count(const K& key) | 返回哈希桶中關鍵碼為key的鍵值對的個數 |
注意:unordered_map中key是不能重復的,因此count函數的返回值最大為1
6. unordered_map的修改操作
| 函數聲明 | 功能介紹 |
| insert | 向容器中插入鍵值對 |
| erase | 刪除容器中的鍵值對 |
| void clear() | 清空容器中有效元素個數 |
| void swap(unordered_map&) | 交換兩個容器中的元素 |
7. unordered_map的桶操作
| 函數聲明 | 功能介紹 |
| size_t bucket count()const | 返回哈希桶中桶的總個數 |
| size_t bucket size(size_t n) const | 返回n號桶中有效元素的總個數 |
| size_t bucket(const K& key) | 返回元素key所在的桶號 |
unordered_set
unordered_set文檔介紹
底層結構
unordered系列的關聯式容器之所以效率比較高,是因為其底層使用了哈希結構。
哈希概念
順序結構以及平衡樹中,元素關鍵碼與其存儲位置之間沒有對應的關系,因此在查找一個元素 時,必須要經過關鍵碼的多次比較。順序查找時間復雜度為O(N),平衡樹中為樹的高度,即 O($log_2 N$),搜索的效率取決于搜索過程中元素的比較次數。
理想的搜索方法:可以不經過任何比較,一次直接從表中得到要搜索的元素。
如果構造一種存儲結構,通過某種函數(hashFunc)使元素的存儲位置與它的關鍵碼之間能夠建立 一一映射的關系,那么在查找時通過該函數可以很快找到該元素。
當向該結構中:
- 插入元素:根據待插入元素的關鍵碼,以此函數計算出該元素的存儲位置并按此位置進行存放
- 搜索元素:對元素的關鍵碼進行同樣的計算,把求得的函數值當做元素的存儲位置,在結構中按此位置取元素比較,若關鍵碼相等,則搜索成功
該方式即為哈希(散列)方法,哈希方法中使用的轉換函數稱為哈希(散列)函數,構造出來的結構稱 為哈希表(Hash Table)(或者稱散列表)
例如:數據集合{1,7,6,4,5,9};
哈希函數設置為:hash(key) = key % capacity;capacity為存儲元素底層空間總的大小。

用該方法進行搜索不必進行多次關鍵碼的比較,因此搜索的速度比較快。
哈希沖突
對于兩個數據元素的關鍵字$k_i$和 $k_j$(i != j),有$k_i$ != $k_j$,但有:Hash($k_i$) == Hash($k_j$),即:不同關鍵字通過相同哈希函數計算出相同的哈希地址,該種現象稱為哈希沖突 或哈希碰撞。
比如:5、25、45分別去%20,映射的位置都是5。
哈希函數
引起哈希沖突的一個原因可能是:哈希函數設計不夠合理。
哈希函數設計原則:
- 哈希函數的定義域必須包括需要存儲的全部關鍵碼,而如果散列表允許有m個地址時,其值域必須在0到m-1之間
- 哈希函數計算出來的地址能均勻分布在整個空間中
- 哈希函數應該比較簡單
常見哈希函數:
1. 直接定址法--(常用)一一映射
- 取關鍵字的某個線性函數為散列地址:Hash(Key)= A*Key + B
- 優點:簡單、均勻
- 缺點:需要事先知道關鍵字的分布情況
- 使用場景:適合查找比較小且連續的情況
2. 除留余數法--(常用)
- 設散列表中允許的地址數為m,取一個不大于m,但最接近或者等于m的質數p作為除數, 按照哈希函數:Hash(key) = key% p(p<=m),將關鍵碼轉換成哈希地址
3. 平方取中法--(了解)
- 假設關鍵字為1234,對它平方就是1522756,抽取中間的3位227作為哈希地址;
- 再比如關鍵字為4321,對它平方就是18671041,抽取中間的3位671(或710)作為哈希地址
- 平方取中法比較適合:不知道關鍵字的分布,而位數又不是很大的情況
4. 折疊法--(了解)
- 折疊法是將關鍵字從左到右分割成位數相等的幾部分(最后一部分位數可以短些),然后將這 幾部分疊加求和,并按散列表表長,取后幾位作為散列地址。
- 折疊法適合事先不需要知道關鍵字的分布,適合關鍵字位數比較多的情況
5. 隨機數法--(了解)
- 選擇一個隨機函數,取關鍵字的隨機函數值為它的哈希地址,即H(key) = random(key),其中 random為隨機數函數。
- 通常應用于關鍵字長度不等時采用此法
6. 數學分析法--(了解)
- 設有n個d位數,每一位可能有r種不同的符號,這r種不同的符號在各位上出現的頻率不一定 相同,可能在某些位上分布比較均勻,每種符號出現的機會均等,在某些位上分布不均勻只 有某幾種符號經常出現。可根據散列表的大小,選擇其中各種符號分布均勻的若干位作為散 列地址。例如:

注意:哈希函數設計的越精妙,產生哈希沖突的可能性就越低,但是無法避免哈希沖突
哈希沖突解決
解決哈希沖突兩種常見的方法是:閉散列和開散列
閉散列
閉散列:也叫開放定址法,當發生哈希沖突時,如果哈希表未被裝滿,說明在哈希表中必然還有 空位置,那么可以把key存放到沖突位置中的“下一個” 空位置中去。那如何尋找下一個空位置呢?
1. 線性探測
比如下圖中的場景,現在需要插入元素44,先通過哈希函數計算哈希地址,hashAddr為4, 因此44理論上應該插在該位置,但是該位置已經放了值為4的元素,即發生哈希沖突。
線性探測:從發生沖突的位置開始,依次向后探測,直到尋找到下一個空位置為止。
插入
- 通過哈希函數獲取待插入元素在哈希表中的位置
- 如果該位置中沒有元素則直接插入新元素,如果該位置中有元素發生哈希沖突, 使用線性探測找到下一個空位置,插入新元素

查找
- i = key % 表的大小 ?
- 如果i為不是要查找的key值,就線性往后查找,直到找到或者遇到空,如果找到表的結尾位置,還沒有找到key值,要往頭回繞。
刪除
- 采用閉散列處理哈希沖突時,不能隨便物理刪除哈希表中已有的元素,若直接刪除元素 會影響其他元素的搜索。比如刪除元素4,如果直接刪除掉,44查找起來可能會受影 響。因此線性探測采用標記的偽刪除法來刪除一個元素。
// 哈希表每個空間給個標記
// EMPTY此位置空, EXIST此位置已經有元素, DELETE元素已經刪除
enum State{EMPTY, EXIST, DELETE};線性探測的實現并改造
// 開放定址法
namespace open_address
{// 狀態enum State{EMPTY,EXIST,DELETE};template<class K, class V>struct HashData // 類模板名:哈希表的數據是結構體的變量(數據和狀態){pair<K, V> _kv;State _state = EMPTY; // 標記默認初始化為空,一旦存進去值,標記為存在,刪除值之后,標記位刪除};template<class K>struct HashFunc // 仿函數:將key轉換成整型{size_t operator()(const K& key){return (size_t)key;// 不傳參數三,默認將key強轉成整型}};// 特化 ---> 在實踐當中string經常做key,所以做特化template<>struct HashFunc<string>{size_t operator()(const string& s){size_t hash = 0;for (auto e : s){hash += e;hash *= 131;}return hash;}};// stoi:只有阿拉伯的字符串數字"1224546"才能用stoi;像"比特"就不能用stoi// 將字符串強制轉換成整型//struct HashFuncString//{// size_t operator()(const string& s)// {// // "abcd"// // "bcad"// // "aadd"// size_t hash = 0;// for (auto e : s) // {// // 將字符串中的每個字符ascll碼值加起來// hash += e;// hash *= 131;// 這樣可以避免ascll碼值相加相等的情況// }//// return hash;// }//};// 參數三:默認缺省的仿函數Hash,沒有傳確定的仿函數,就用缺省的發仿函數HashFunc<K>template<class K, class V, class Hash = HashFunc<K>>class HashTable // 類模板名:哈希表{public:HashTable(size_t size = 10){_tables.resize(size);// 使用resize的話,size和capcacity就相等了}HashData<K, V>* Find(const K& key){Hash hs; // 仿函數的對象// 線性探測size_t hashi = hs(key) % _tables.size();while (_tables[hashi]._state != EMPTY){if (key == _tables[hashi]._kv.first&& _tables[hashi]._state == EXIST){return &_tables[hashi];}++hashi;// 如果++超出size,則取模從頭再來hashi %= _tables.size();}return nullptr;}bool Insert(const pair<K, V>& kv){// 如果已經有了,就返回falseif (Find(kv.first))return false;// 擴容的問題 不強制類型轉換成double的話,會有7/10==0的情況//if ((double)_n / (double)_tables.size() >= 0.7)if (_n * 10 / _tables.size() >= 7){// 方法一://size_t newSize = _tables.size() * 2;// 不能在原表的空間上擴容空間,因為這樣會使映射關系混亂//vector<HashData> newTables(newSize); // 需要重新開辟一塊新空間遍歷舊表,重新映射到新表,那么就得此處再次寫一遍線性探測的代碼,再讓兩個表交換一下....//_tables.swap(newTables);// 方法二:HashTable<K, V, Hash> newHT(_tables.size() * 2);// 遍歷舊表,插入到新表for (auto& e : _tables){if (e._state == EXIST){newHT.Insert(e._kv);// 這里新表調用Insert()函數,并不會陷入死循環,因為空間*2倍之后,不會再次進入if判斷條件了// 直接復用線性探測的代碼}}_tables.swap(newHT._tables);// 交換兩表,那么舊表出了作用域就會調用析構函數,舊表數據會被釋放}Hash hs;// 線性探測size_t hashi = hs(kv.first) % _tables.size(); // 除和取模都不能除或取模0// 這里要模取的是size,而不是capacity;假設表中的capacity和size是不一樣的,// 放值是需要[]的,[]會檢查i < size,如果值放在模capacity的那塊區間,超出size會越界;// 所以只能放值在size區間處,放在size和capacity區間,則越界。while (_tables[hashi]._state == EXIST) // 此位置狀態為存在{++hashi;hashi %= _tables.size();// 模上一個size,走到尾之后,從頭再來}// 此位置狀態為空或被刪除_tables[hashi]._kv = kv;_tables[hashi]._state = EXIST;++_n; // 實際數據個數+1return true;}bool Erase(const K& key){HashData<K, V>* ret = Find(key);if (ret){_n--;ret->_state = DELETE; // 直接改狀態就相當于刪除了return true;}else{return false;}}private:vector<HashData<K, V>> _tables;size_t _n = 0; // 實際存儲的數據個數};思考:哈希表什么情況下進行擴容?如何擴容?
- 哈希沖突越多,效率就越低。
- 負載因子/載荷因子 = 實際存進去數據個數/表的大小。
- 閉散列(開放定址法):負載因子一般會控制在0.7左右。
線性探測優點:實現非常簡單。
線性探測缺點:一旦發生哈希沖突,所有的沖突連在一起,容易產生數據“堆積”,即:不同關鍵碼占據了可利用的空位置,使得尋找某關鍵碼的位置需要許多次比較,導致搜索效率降低。
二次探測
線性探測的缺陷是產生沖突的數據堆積在一塊,這與其找下一個空位置有關系,因為找空位置的方式就是挨著往后逐個去找,因此二次探測為了避免該問題,找下一個空位置的方法 為:$H_i$ = ($H_0$ + $i^2$ )% m, 或者:$H_i$ = ($H_0$ - $i^2$ )% m。其中:i = 1,2,3…, $H_0$是通過散列函數Hash(x)對元素的關鍵碼 key 進行計算得到的位置,m是表 的大小。
對于下圖中如果要插入44,產生沖突,使用解決后的情況為:

研究表明:當表的長度為質數且表裝載因子a不超過0.5時,新的表項一定能夠插入,而且任 何一個位置都不會被探查兩次。因此只要表中有一半的空位置,就不會存在表滿的問題。在 搜索時可以不考慮表裝滿的情況,但在插入時必須確保表的裝載因子a不超過0.5,如果超出必須考慮增容。
因此:閉散列最大的缺陷就是空間利用率比較低,這也是哈希的缺陷。
開散列
開散列概念
開散列法又叫鏈地址法(開鏈法),首先對關鍵碼集合用散列函數計算散列地址,具有相同地址的關鍵碼歸于同一子集合,每一個子集合稱為一個桶,各個桶中的元素通過一個單鏈表鏈接起來,各鏈表的頭結點存儲在哈希表中。

從上圖可以看出,開散列中每個桶中放的都是發生哈希沖突的元素。
開散列實現并改造 + 迭代器的實現
template<class K>
struct HashFunc // 仿函數:將key轉換成整型
{size_t operator()(const K& key){return (size_t)key;// 不傳參數三,默認將key強轉成整型}
};// 特化 ---> 在實踐當中string經常做key,所以做特化
template<>
struct HashFunc<string>
{size_t operator()(const string& s){size_t hash = 0;for (auto e : s){hash += e;hash *= 131;}return hash;}
};
// 哈希桶
namespace hash_bucket
{// T -> K// T -> pair<K, V>template<class T>struct HashNode{HashNode<T>* _next;T _data;HashNode(const T& data):_next(nullptr), _data(data){}};// 編譯器有一個原則:先定義或先聲明,再使用。// 在使用一個變量、類型、函數,要先定義或先聲明,再使用。因為編譯器為了提高編譯速度,有一個原則,// 比如:在使用一個變量、類型或函數時,編譯器只會向上找,不會向下找,只向上找,編譯速度會快很多。// 下面__HTIterator類模板中使用了HashTable<K, T, KeyOfT, Hash>,在上面沒有HashTable的定義,// 所以編譯器會報錯,因為編譯器不認識HashTable。// 類里面是不受影響的,因為類里面的規則,是在整個類域里面進行查找,編譯器把類域當成一個整體。// 那我們如果把整個HashTable類模板放在__HTIterator類模板之前,也會有問題,// 因為HashTable類模板中也使用了__HTIterator類型,這個地方就是一個經典的互相引用。// 那么這時候就只能增加一個前置聲明// 前置聲明(聲明中不能有缺省值)template<class K, class T, class KeyOfT, class Hash>class HashTable;template<class K, class T, class KeyOfT, class Hash>struct __HTIterator{typedef HashNode<T> Node;typedef HashTable<K, T, KeyOfT, Hash> HT;typedef __HTIterator<K, T, KeyOfT, Hash> Self;Node* _node;HT* _ht;__HTIterator(Node* node, HT* ht):_node(node), _ht(ht){}T& operator*(){return _node->_data;}T* operator->(){return &_node->_data;}// 返回的是哈希表中對應的元素Self& operator++(){// 當前哈希表所在位置的桶沒有走完if (_node->_next){// 當前桶還是節點_node = _node->_next;}else{// 當前桶走完了,找下一個桶KeyOfT kot;Hash hs;// _tables是HashTable的私有,所以_tables無法使用。我們可以采用友元的方法size_t hashi = hs(kot(_node->_data)) % _ht->_tables.size();// 找下一個桶hashi++;while (hashi < _ht->_tables.size()){if (_ht->_tables[hashi]){_node = _ht->_tables[hashi];break;}hashi++;}// 后面沒有桶了if (hashi == _ht->_tables.size()){_node = nullptr;}}return *this;}bool operator!=(const Self& s){return _node != s._node;}};// 參數三:仿函數,對于set來說,返回key;對于map來說,返回pair<key,value>中的key// 參數四:轉換成整型的仿函數template<class K, class T, class KeyOfT, class Hash>class HashTable{// 迭代器想要使用哈希表,就得把迭代器變成哈希表的友元template<class K, class T, class KeyOfT, class Hash>friend struct __HTIterator;// 普通類的友元,只有這一行代碼;類模板的友元,得把模板參數聲明一下typedef HashNode<T> Node;public:typedef __HTIterator<K, T, KeyOfT, Hash> iterator;iterator begin(){for (size_t i = 0; i < _tables.size(); i++){// 找到第一個桶的第一個節點if (_tables[i]){// this就是哈希表對象的地址return iterator(_tables[i], this);}}// 找不到返回空return end();}iterator end(){return iterator(nullptr, this);// 調用的是__HTIterator的構造函數}HashTable(){_tables.resize(10, nullptr);_n = 0;}// 這里析構的是表中所掛的哈希桶中的節點;vector出了作用域之后會自己調用析構函數// 哪怕我們自己顯示寫了析構函數,自定義類型出了作用域也會顯示調用析構~HashTable(){for (size_t i = 0; i < _tables.size(); i++){Node* cur = _tables[i];while (cur){Node* next = cur->_next;delete cur;cur = next;}_tables[i] = nullptr;}}pair<iterator, bool> Insert(const T& data){KeyOfT kot;// 此時Find()函數返回的是迭代器,不能轉換成bool值,所以要拿迭代器進行比較// 之前Find()函數返回的是節點的指針,可以隱式類型轉換成bool值/* if (Find(kot(data)) != end())return false;*/iterator it = Find(kot(data));if (it != end())return make_pair(it, false);Hash hs;// 負載因子到1就擴容if (_n == _tables.size()){// 創建一個新表vector<Node*> newTables(_tables.size() * 2, nullptr);// 調用HashTable的構造函數for (size_t i = 0; i < _tables.size(); i++){// 取出舊表中節點,重新計算掛到新表桶中Node* cur = _tables[i];while (cur){Node* next = cur->_next;// 保存下一個節點// 頭插到新表size_t hashi = hs(kot(cur->_data)) % newTables.size();cur->_next = newTables[hashi];newTables[hashi] = cur;cur = next;// 查看下一個節點應該掛到那個桶中}_tables[i] = nullptr;// 將舊表置空}_tables.swap(newTables);// 交換兩表之后,舊表出了作用域就被釋放掉}size_t hashi = hs(kot(data)) % _tables.size();Node* newnode = new Node(data);// 頭插newnode->_next = _tables[hashi];_tables[hashi] = newnode;++_n;return make_pair(iterator(newnode, this), true);}iterator Find(const K& key){KeyOfT kot;Hash hs;size_t hashi = hs(key) % _tables.size();Node* cur = _tables[hashi];while (cur){if (kot(cur->_data) == key){return iterator(cur, this);}cur = cur->_next;}return iterator(nullptr, this);}bool Erase(const K& key){KeyOfT kot;Hash hs;size_t hashi = hs(key) % _tables.size();Node* prev = nullptr;Node* cur = _tables[hashi];while (cur){if (kot(cur->_data) == key){// 刪除if (prev) // 不是桶中的第一個節點{prev->_next = cur->_next;}else // 是桶中的第一個節點{_tables[hashi] = cur->_next;}delete cur;--_n;return true;}prev = cur;cur = cur->_next;}return false;}private:vector<Node*> _tables; // 指針數組size_t _n;};
}開散列增容
桶的個數是一定的,隨著元素的不斷插入,每個桶中元素的個數不斷增多,極端情況下,可能會導致一個桶中鏈表節點非常多,會影響的哈希表的性能,因此在一定條件下需要對哈希表進行增容,那該條件怎么確認呢?開散列最好的情況是:每個哈希桶中剛好掛一個節點, 再繼續插入元素時,每一次都會發生哈希沖突,因此,在元素個數剛好等于桶的個數時,可 以給哈希表增容。
開散列與閉散列比較
應用鏈地址法處理溢出,需要增設鏈接指針,似乎增加了存儲開銷。事實上: 由于開地址法必須保持大量的空閑空間以確保搜索效率,如二次探查法要求裝載因子a <= 0.7,而表項所占空間又比指針大的多,所以使用鏈地址法反而比開地址法節省存儲空間。
不同的類型轉換成整型的操作
struct Date
{int _year;int _month;int _day;
};// 將日期類轉換成整型
struct HashFuncDate
{// 2024/6/3// 2024/3/6size_t operator()(const Date& d){size_t hash = 0;hash += d._year;hash *= 131;hash += d._month;hash *= 131;hash += d._day;hash *= 131;return hash;}
};struct Person
{string _name;string _id; // 身份證號碼string _tel;int _age;string _class;string _address; // //...
};struct HashFuncPerson
{// 2024/6/3// 2024/3/6size_t operator()(const Person& p){size_t hash = 0;for (auto e : p._id){hash += e;hash *= 131;}return hash;}
};MyOrderedMap.h
#include"HashTable.h"namespace bit
{template<class K, class V, class Hash = HashFunc<K>>class unordered_map{struct MapKeyOfT{const K& operator()(const pair<K, V>& kv){return kv.first;}};public:typedef typename hash_bucket::HashTable<K, pair<const K, V>, MapKeyOfT, Hash>::iterator iterator;iterator begin(){return _ht.begin();}iterator end(){return _ht.end();}pair<iterator, bool> insert(const pair<K, V>& kv){return _ht.Insert(kv);}// Map要把[]實現出來,就得解決insert(),[]的本質就是insert()V& operator[](const K& key){pair<iterator, bool> ret = insert(make_pair(key, V()));return ret.first->second;}iterator find(const K& key){return _ht.Find(key);}bool erase(const K& key){return _ht.Erase(key);}private:hash_bucket::HashTable<K, pair<const K, V>, MapKeyOfT, Hash> _ht;};void test_map1(){unordered_map<string, string> dict;dict.insert(make_pair("sort", ""));dict.insert(make_pair("left", ""));dict.insert(make_pair("right", "?"));for (auto& kv : dict){//kv.first += 'x';kv.second += 'y';cout << kv.first << ":" << kv.second << endl;}}
}MyOrderedSet.h
#include"HashTable.h"namespace bit
{template<class K, class Hash = HashFunc<K>>class unordered_set{struct SetKeyOfT{const K& operator()(const K& key){return key;}};public:typedef typename hash_bucket::HashTable<K, const K, SetKeyOfT, Hash>::iterator iterator;iterator begin(){return _ht.begin();}iterator end(){return _ht.end();}bool insert(const K& key){return _ht.Insert(key);}pair<iterator, bool> find(const K& key){return _ht.Find(key);}bool erase(const K& key){return _ht.Erase(key);}private:hash_bucket::HashTable<K, const K, SetKeyOfT, Hash> _ht;};void test_set1(){unordered_set<int> us;us.insert(3);us.insert(1);us.insert(5);us.insert(15);us.insert(45);us.insert(7);unordered_set<int>::iterator it = us.begin();while (it != us.end()){//*it += 100;cout << *it << " ";++it;}cout << endl;int x = 0;cin >> x;if (us.find(x) != us.end()){cout << "找到了" << endl;}else{cout << "沒有找到" << endl;}for (auto e : us){cout << e << " ";}cout << endl;}}int a[10];// 靜態數組
// 動態數組:malloc或new出來的數組是動態數組哈希的應用
位圖
位圖概念
面試題
給40億個不重復的無符號整數,沒排過序。給一個無符號整數,如何快速判斷一個數是否在這40億個數中。【騰訊】
- 遍歷,時間復雜度O(N)
- 排序(O(NlogN)),利用二分查找: logN
- 位圖解決 數據是否在給定的整形數據中,結果是在或者不在,剛好是兩種狀態,那么可以使用一個二進制比特位來代表數據是否存在的信息,如果二進制比特位為1,代表存在,為0 代表不存在。比如:

位圖概念
- 所謂位圖,就是用每一位來存放某種狀態,適用于海量數據,數據無重復的場景。通常是用 來判斷某個數據存不存在的。
位圖的實現
namespace bit
{// 用一個非類型模板參數來控制位圖要開多大(位圖是存在于數組里面的)template<size_t N>class bitset{public:bitset(){// 假如:N是50個比特位,50除以32是1個整型,還有18個比特位沒有開出來,所以要向上取整// 多開一個整型_bits.resize(N / 32 + 1, 0);//cout << N << endl;}// 把x映射的位標記成1void set(size_t x){assert(x <= N);// x不能超出Nsize_t i = x / 32;// 計算x在第幾個整型上size_t j = x % 32;// 計算x在這個整型的第幾個位上_bits[i] |= (1 << j);}// 把x映射的位標記成0void reset(size_t x){assert(x <= N);size_t i = x / 32;size_t j = x % 32;_bits[i] &= ~(1 << j);}// 檢測x映射的標記位是1還是0bool test(size_t x){assert(x <= N);size_t i = x / 32;size_t j = x % 32;return _bits[i] & (1 << j);}private:vector<int> _bits;};void test_bitset(){bitset<100> bs1;bs1.set(50);bs1.set(30);bs1.set(90);for (size_t i = 0; i < 100; i++){if (bs1.test(i)){cout << i << "->" << "在" << endl;}else{cout << i << "->" << "不在" << endl;}}bs1.reset(90);bs1.set(91);cout << endl << endl;for (size_t i = 0; i < 100; i++){if (bs1.test(i)){cout << i << "->" << "在" << endl;}else{cout << i << "->" << "不在" << endl;}}// 這三種方式都可以開42億9千萬個位圖大小的空間bitset<-1> bs2;bitset<UINT_MAX> bs3;bitset<0xffffffff> bs4;}


位圖應用
- 快速查找某個數據是否在一個集合中
- 排序 + 去重
- 求兩個集合的交集、并集等
- 操作系統中磁盤塊標記
給定100億個整數,設計算法找到只出現一次的整數?
思路:出現1次和1次以上的整數需要兩個比特位:00 ---> 0次;01 ---> 1次;10 ---> 2次及以上。
代碼展示:
template<size_t N>
class two_bit_set
{
public:void set(size_t x){// 00 -> 01if (_bs1.test(x) == false&& _bs2.test(x) == false){_bs2.set(x);}// 01 -> 10else if (_bs1.test(x) == false&& _bs2.test(x) == true){_bs1.set(x);_bs2.reset(x);}}//int test(size_t x)//{// if (_bs1.test(x) == false// && _bs2.test(x) == false)// {// return 0;// }// else if (_bs1.test(x) == false// && _bs2.test(x) == true)// {// return 1;// }// else// {// return 2; // 2次及以上// }//}bool test(size_t x){if (_bs1.test(x) == false&& _bs2.test(x) == true){return true;}return false;}
private:bitset<N> _bs1;// 自定義類型的對象會去調用它的構造函數bitset<N> _bs2;
};void test_bitset2()
{int a[] = { 5,7,9,2,5,99,5,5,7,5,3,9,2,55,1,5,6 };two_bit_set<100> bs;for (auto e : a){bs.set(e);}for (size_t i = 0; i < 100; i++){//cout << i << "->" << bs.test(i) << endl;if (bs.test(i)){cout << i << endl;}}
}給兩個文件,分別有100億個整數,我們只有1G內存,如何找到兩個文件交集?
思路:分別set到兩個位圖,同時為1的就是交集。
1G內存是夠的,100億個整數,并不需要100億個比特位,因為整數最多42億9千萬個,所以說映射的位圖只需要42億9千萬個位,42億9千萬個比特位換算成1G,兩個0.5G就是1G。
?1GB是2的30次方,是10億字節,100億字節是10G,那么100億個整型是40G。
代碼展示:
void test_bitset3()
{int a1[] = { 5,7,9,2,5,99,5,5,7,5,3,9,2,55,1,5,6 };int a2[] = { 5,3,5,99,6,99,33,66 };bitset<100> bs1;bitset<100> bs2;for (auto e : a1){bs1.set(e);}for (auto e : a2){bs2.set(e);}for (size_t i = 0; i < 100; i++){// 尋找交集if (bs1.test(i) && bs2.test(i)){cout << i << endl;}}
}位圖應用變形:1個文件有100億個int,1G內存,設計算法找到出現次數不超過2次的所有整數
內存當中一般是存不下這些值,這些值都是存在文件里面的。位圖不是開40億,而是按照范圍來開的(42億9千萬),因為它的范圍是無符號的整數,(0~2^32-1)。
采用兩個比特位:00 ---> 0次;01 ---> 1次;10 ---> 2次;11 ---> 3次及以上
給定100億個整數,只有512M,需要在512M內存中設計算法找到只出現一次的整數?

因為1G是10億字節,1G是2^30,1G是42億9千萬個比特位,整數的范圍最大才到42億9千萬,所以100億個整數中有大量是重復的數字,所以要在512M內存中查找只出現一次的整數,可以讓42億9千萬個整數分成兩份,因為512M是是42億9千萬個比特位的一半。
先查找前一半,再查找后一半,映射的過程中就是去重的過程。
布隆過濾器
布隆過濾器提出
我們在使用新聞客戶端看新聞時,它會給我們不停地推薦新的內容,它每次推薦時要去重,去掉 那些已經看過的內容。問題來了,新聞客戶端推薦系統如何實現推送去重的? 用服務器記錄了用 戶看過的所有歷史記錄,當推薦系統推薦新聞時會從每個用戶的歷史記錄里進行篩選,過濾掉那 些已經存在的記錄。 如何快速查找呢?
- 用哈希表存儲用戶記錄,缺點:浪費空間
- 用位圖存儲用戶記錄,缺點:位圖一般只能處理整形,如果內容編號是字符串,就無法處理 了。
- 將哈希與位圖結合,即布隆過濾器
布隆過濾器概念
布隆過濾器是由布隆(Burton Howard Bloom)在1970年提出的 一種緊湊型的、比較巧妙的概率型數據結構,特點是高效地插入和查詢,可以用來告訴你 “某樣東西一定不存在或者可能存在”,它是用多個哈希函數,將一個數據映射到位圖結構中。此種方式不僅可以提升查詢效率,也可以節省大量的內存空間。

布隆過濾器的插入
#pragma once
#include<bitset>
#include<string>struct HashFuncBKDR
{// BKDRsize_t operator()(const string& s){size_t hash = 0;for (auto ch : s){hash *= 131;hash += ch;}return hash;}
};struct HashFuncAP
{// APsize_t operator()(const string& s){size_t hash = 0;for (size_t i = 0; i < s.size(); i++){if ((i & 1) == 0) // 偶數位字符{hash ^= ((hash << 7) ^ (s[i]) ^ (hash >> 3));}else // 奇數位字符{hash ^= (~((hash << 11) ^ (s[i]) ^ (hash >> 5)));}}return hash;}
};struct HashFuncDJB
{// DJBsize_t operator()(const string& s){size_t hash = 5381;for (auto ch : s){hash = hash * 33 ^ ch;}return hash;}
};
// 參數三:三個哈希仿函數的個數,表示一個值能映射3個位
template<size_t N,class K = string,class Hash1 = HashFuncBKDR,class Hash2 = HashFuncAP,class Hash3 = HashFuncDJB>
class BloomFilter
{
public:void Set(const K& key){// 比如:插入第一個數,映射0~M-1的比特位區間// 一個值要映射到三個比特位上,為了減少沖突size_t hash1 = Hash1()(key) % M;size_t hash2 = Hash2()(key) % M;size_t hash3 = Hash3()(key) % M;_bs->set(hash1);_bs->set(hash2);_bs->set(hash3);}// 這里不需要寫reset()刪除函數,因為刪除百度,騰訊判斷也可能不在了。因為百度和騰訊可能會映射到同一個位置bool Test(const K& key){// 值映射的三個比特位上,只要有一個比特位為0,就是該值不在哈希表中size_t hash1 = Hash1()(key) % M;if (_bs->test(hash1) == false)return false;size_t hash2 = Hash2()(key) % M;if (_bs->test(hash2) == false)return false;size_t hash3 = Hash3()(key) % M;if (_bs->test(hash3) == false)return false;return true; // 存在誤判(有可能3個位都是跟別人沖突的,所以誤判)}private:// const size_t M = 10 * N;// 我們不能用這種成員變量,因為這個成員變量是屬于對象的,只是聲明,沒有空間,只在初始化列表才會初始化// 加一個靜態static就可以了,那么這個變量就在靜態區,就不屬于對象了,而是屬于整個類// N:比特位。插入一個整數,也就是一個整數映射一個比特位,比特位擴容10倍的Nstatic const size_t M = 10 * N; // 想降低誤判率:可以增大比特位的空間bit::bitset<M> _bs;// 如果就是想要使用庫里面的bitset,可以new在堆區開辟一個std::bitset<M>類型的空間,將空間的地址給_bs//std::bitset<M>* _bs = new std::bitset<M>;
};// 庫里面的stl::bitset<M>類型所開辟的空間是開在對象里面的,這個對象是一個靜態數組
// 我們自己用vector<>實現的bitset是調用resize()函數開辟空間是在堆上的void TestBloomFilter1()
{string strs[] = { "百度","字節","騰訊" };// 中文是由多個字符構成的BloomFilter<10> bf;for (auto& s : strs){bf.Set(s);}for (auto& s : strs){cout << bf.Test(s) << endl;}for (auto& s : strs){cout << bf.Test(s + 'a') << endl;}cout << bf.Test("擺渡") << endl;cout << bf.Test("百渡") << endl;
}布隆過濾器的查找
布隆過濾器的思想是將一個元素用多個哈希函數映射到一個位圖中,因此被映射到的位置的比特 位一定為1。所以可以按照以下方式進行查找:分別計算每個哈希值對應的比特位置存儲的是否為 零,只要有一個為零,代表該元素一定不在哈希表中,否則可能在哈希表中。
注意:布隆過濾器如果說某個元素不存在時,該元素一定不存在,如果該元素存在時,該元素可 能存在,因為有些哈希函數存在一定的誤判。
比如:在布隆過濾器中查找"alibaba"時,假設3個哈希函數計算的哈希值為:1、3、7,剛好和其 他元素的比特位重疊,此時布隆過濾器告訴該元素存在,但實該元素是不存在的。
布隆過濾器刪除
布隆過濾器不能直接支持刪除工作,因為在刪除一個元素時,可能會影響其他元素。

每個位置改成多個位的引用計數就可以支持。比如:一個映射位置給8個bit標記,但是這樣空間的消耗就大了。
布隆過濾器優點
- 增加和查詢元素的時間復雜度為:O(K), (K為哈希函數的個數,一般比較小),與數據量大小無 關
- 哈希函數相互之間沒有關系,方便硬件并行運算
- 布隆過濾器不需要存儲元素本身,在某些對保密要求比較嚴格的場合有很大優勢
- 在能夠承受一定的誤判時,布隆過濾器比其他數據結構有這很大的空間優勢
- 數據量很大時,布隆過濾器可以表示全集,其他數據結構不能
- 使用同一組散列函數的布隆過濾器可以進行交、并、差運算
布隆過濾器缺陷
- 有誤判率,即存在假陽性(False Position),即不能準確判斷元素是否在集合中(補救方法:再 建立一個白名單,存儲可能會誤判的數據)
- 不能獲取元素本身
- 一般情況下不能從布隆過濾器中刪除元素
- 如果采用計數方式刪除,可能會存在計數回繞問題
布隆過濾器的面試題

給兩個文件,分別有100億個query(字符串),我們只有1G內存,如何找到兩個文件交集?分別給出精確算法和近似算法?

小文件在找交集是沒有誤判的,因為已經讀到內存當中了,不需要在使用布隆過濾器,直接將文件中的數據放到底層為哈希表或紅黑樹的容器中。
之前的算法要用布隆過濾器,因為數據在數據庫中,都去數據庫中查找太慢了,所以用布隆過濾,會效率高。
哈希切割
給一個超過100G大小的log file, log中存著IP地址,設計算法找到出現次數最多的IP地址? 與上題條件相同,如何找到top K的IP?如何直接用Linux系統命令實現?
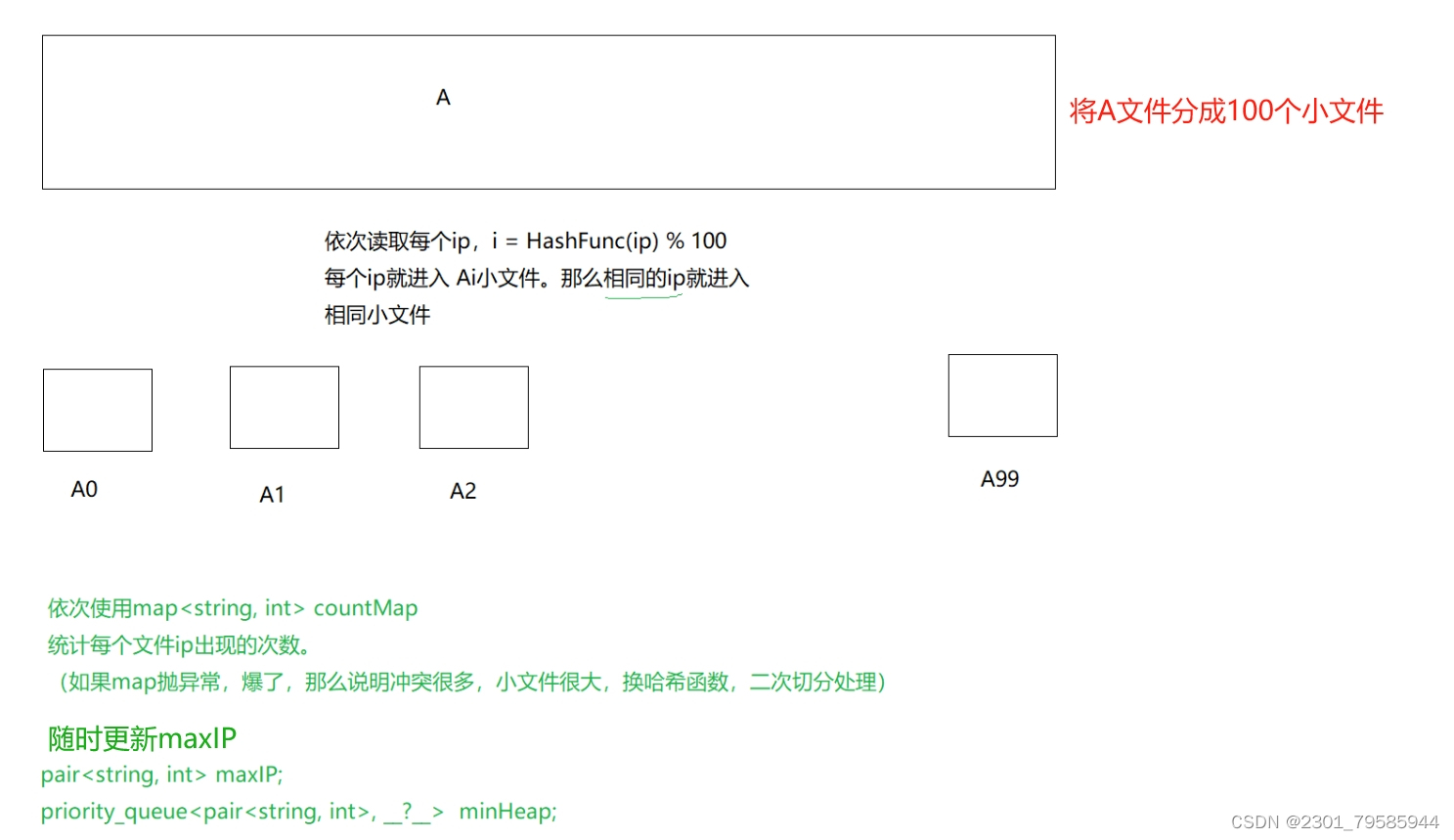
如果是top K ,就自己建立一個小堆,默認是大堆,我們還得寫一個仿函數,因為不能用pair<string,int>類型比,我們要用pair<string,int>類型中的second來進行比較,控制成一個K個數的小堆。
海量數據問題特征:數據量大,內存存不下。
- 先考慮具有特點的數據結構能否解決?比如:位圖、堆、布隆過濾器等。
- 大事化小思路。哈希切分(不能平均切分),切小以后,放到內存中能處理。
總結
好了,本篇博客到這里就結束了,如果有更好的觀點,請及時留言,我會認真觀看并學習。
不積硅步,無以至千里;不積小流,無以成江海。
實現通用音頻事件標記(Audio Tagger))








)
)


希爾排序)
Java程序設計高級(一))




