目錄
1.課題概述
2.系統仿真結果
3.核心程序與模型
4.系統原理簡介
5.完整工程文件
1.課題概述
基于模糊PID控制器的汽車電磁懸架控制系統simulink建模與仿真。
2.系統仿真結果
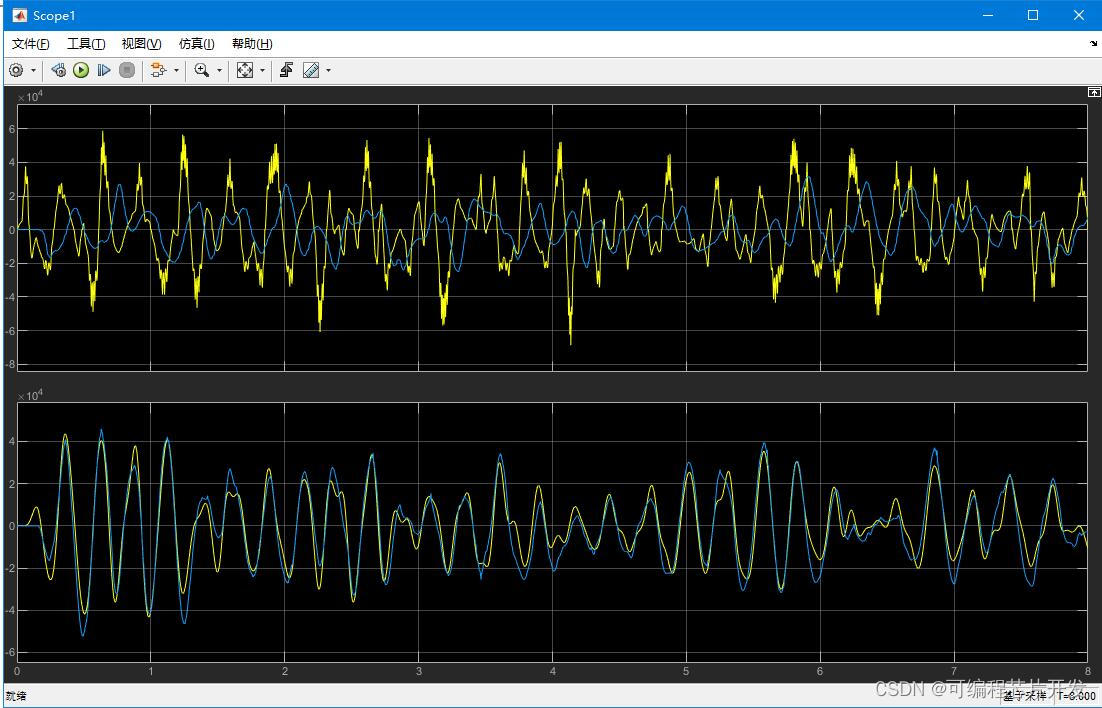
上面的仿真結果是無控制器和LQG的對比,以及有控制器和LQG的對比仿真。
3.核心程序與模型
版本:MATLAB2022a


08_015m
4.系統原理簡介
? ? ? ?汽車電磁懸架控制系統采用模糊PID控制器融合了模糊邏輯的非線性處理能力和PID控制器的經典穩定性與快速響應特性,以提高車輛行駛的舒適性和操控性能。這種控制策略特別適用于半主動或主動懸架系統,能夠動態調整懸架剛度和阻尼系數,以適應不同的路面條件和駕駛需求。
模糊控制器的核心是模糊規則庫,它根據誤差和誤差變化率的模糊化結果,動態調整PID參數。例如,一個簡單的規則可能是:
- 如果誤差是“大”且誤差變化率是“正”,則增大Kp?以快速減小誤差;
- 如果誤差是“小”且誤差變化率是“負”,則減少Ki?以避免超調。
這些規則通過一系列IF-THEN語句形式化,并且可以有許多這樣的規則以覆蓋所有可能的輸入情況。

? ? ?基于模糊PID控制器的汽車電磁懸架控制系統,通過模糊邏輯動態調整PID控制器參數,實現了對復雜路況的自適應控制。該系統不僅提高了車輛行駛的平穩性,而且增強了對緊急避障、高速行駛等特殊工況的應對能力。
5.完整工程文件
v

)




![Collection(一)[集合體系]](http://pic.xiahunao.cn/Collection(一)[集合體系])


)





)


-C++-OD統一考試(C卷D卷))
