系統辨識
- 前言
- 系統辨識
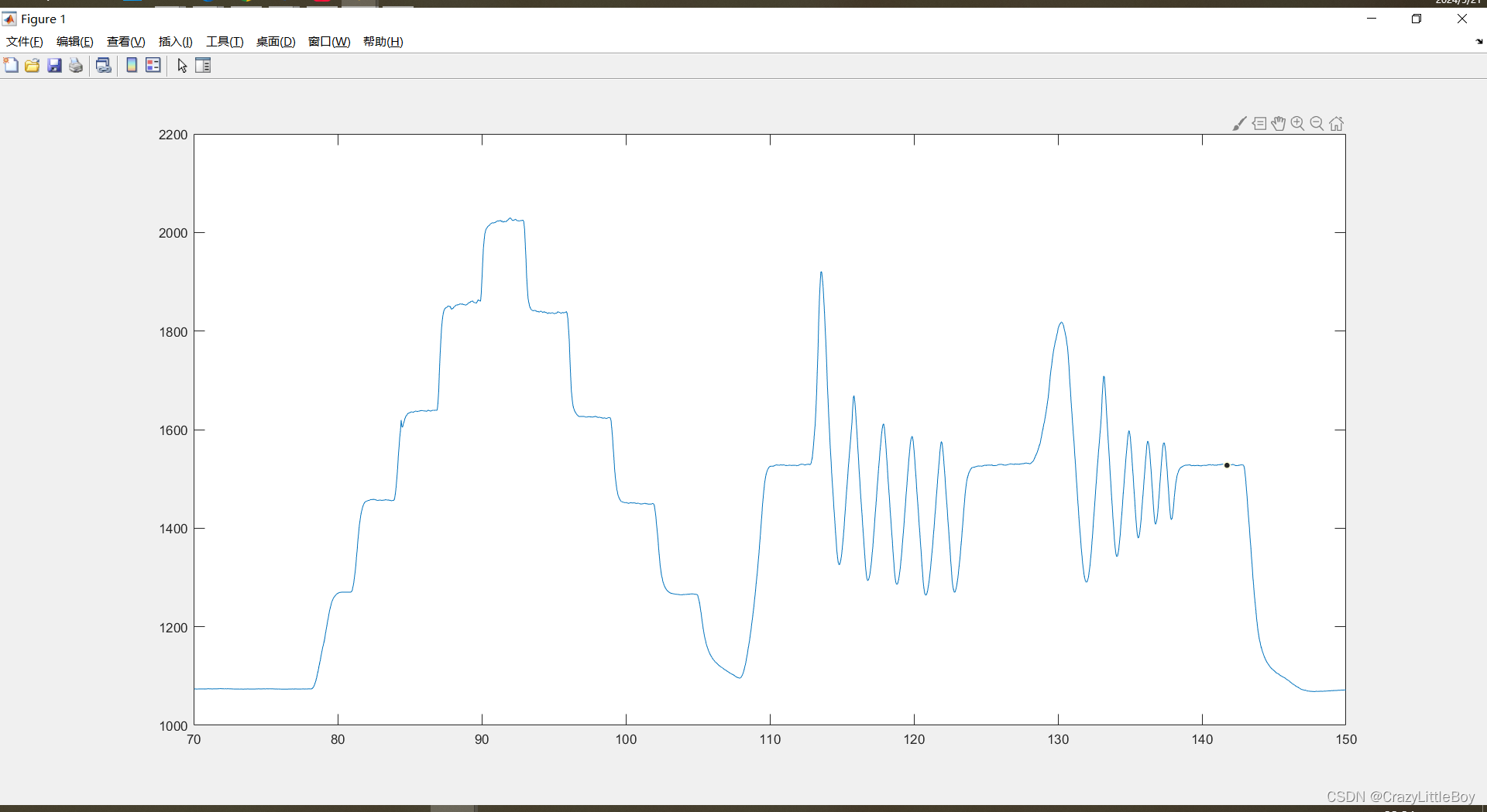
- 第一步 選取時域數據到app
- 第二步 分割數據
- 第三步 設置傳遞函數的參數
- 第四步 Estimate
- 第五步
- 結束
前言
接上節:simulink-仿真以及PID參數整定
系統模型的辨識工作,在控制領域,一般用于開發控制器的先手工作。一般而言,設計控制器,會依據被控對象的數學模型。依據其數學模型,可以分析其各種特性,所以數學模型就顯得很重要。
數學模型,通俗一點講就是一個數學表達式,f(x, t),這個表達式有個特點就是,給(輸入)x 賦值,那么這個表達式就會是一個關于時間 t 的函數,就會在時間軸上,隨著時間變化而變化,呈現出的輸出值,就會和實際的物理模型的輸出近似。
為什么說是近似呢,實際生活中,物理模型的實際輸出大多都會相對復雜,并不是有特別明顯的規律,有的可能會隨時間、環境以及各種情況變化而變化,那么還用一個固定的公式表示其輸出,就不準確了。也有一些簡單的物理模型,這樣的模型就很容易,就直接可以用簡單的數學公式表示其輸出。
那么可能會有新手和我一樣疑惑,既然有的不準確,那就用一些高級的方法去擬合得到實際物理對象的數學模型。有沒有方法,也有,但是考慮到情況的復雜度,用統計學的方法去擬合,也不能覆蓋全部的情況下的數學模型,所以隨后的數學模型也只能做到近似。
那么問題又來了,既然是近似,橫豎結果不能完全一致,那何必用那么復雜的方法去得到數學模型呢。所以就是這個想法,就有了高階模型線性化處理,或者降階數,能夠用最簡單的一階模型去表示物理對象的輸出,就不用二階模型,就秉承這個原則,去簡化數學模型。
那么什么情況下用一階什么時候用二階呢,有這么一段話,但是很繞口,簡單說就是要給物理對象一個輸入信號,可以是階躍信號,看從一個值變化到另一個值,物理對象的實際輸出結果的變化曲線,由變化曲線來判斷。
這里說的是對一個系統不知道的情況下,采取的辦法,這個辦法又被通俗的叫作工程試驗法,給一個激勵信號,看輸出動態響應,然后有輸入和輸出結果,就可以借助工具箱里的系統辨識去擬合系統的數學模型。
在開始說系統辨識的方法前,還要解釋一下前邊的兩個問題:
- 既然最后得到的數學模型只是近似模型,那么設計的控制器能有用么?這個問題就是控制器需要解決的問題,最經典的PID控制器,就是包含了這點,它允許模型不準確。所以大多的控制器都具備一定的容錯能力,本身控制器的作用就是降低誤差,只要這個誤差不是太大,就能救回來。那些嚴格綁定被控對象數學模型的控制器,就更加適用在準確的數學模型上。
- 準確的數學模型又從哪里來呢?最常見的運動的質點,物理中學過的 s = v0 x t + 1/2 x a x t^2 , 這個質點可以稍微放大一下,就變成遙控小車。那么遙控小車的運動學模型就是這個公式,輸入加速度后,路程就和時間相關,隨時間變化。但是實際小車沒這么簡單,小車還有質量,小車也不是手推的,需要提供電,由電機轉動驅動小車,那么就涉及驅動力多大,能提供多大加速度,小車需要變速,那么要平滑變速,就需要加速度控制,那么就要有動力學公式,一個運動學,一個動力學,兩個公式就是小車的數學模型,在不考慮什么復雜環境下,風阻,地面摩擦力降低這些情況,數學模型就是精準的,所以科研分析大多是先有推導的公式,然后才會有一些沒法計算推導得到的系統進行掃頻然后系統辨識 。
系統辨識
上邊說了,辨識模型就需要激勵信號輸入,和響應信號輸入,由輸入、輸出才能辨識。

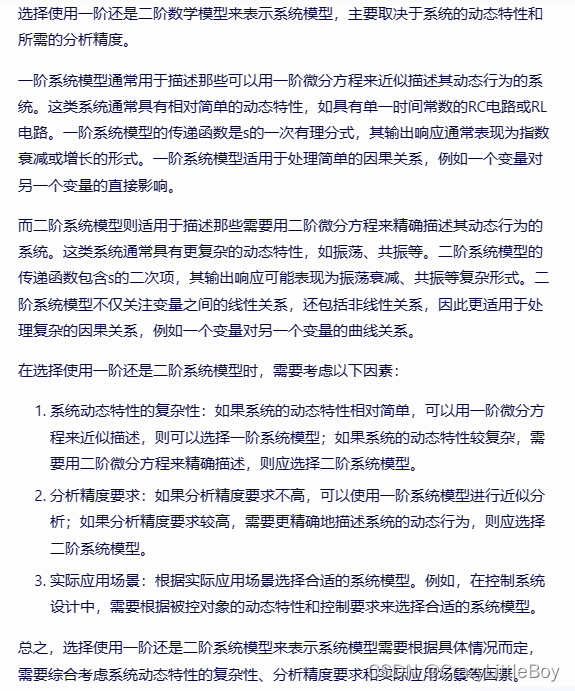
常用的激勵信號,是一個組合信號,階躍、正弦、斜坡、啁啾信號:
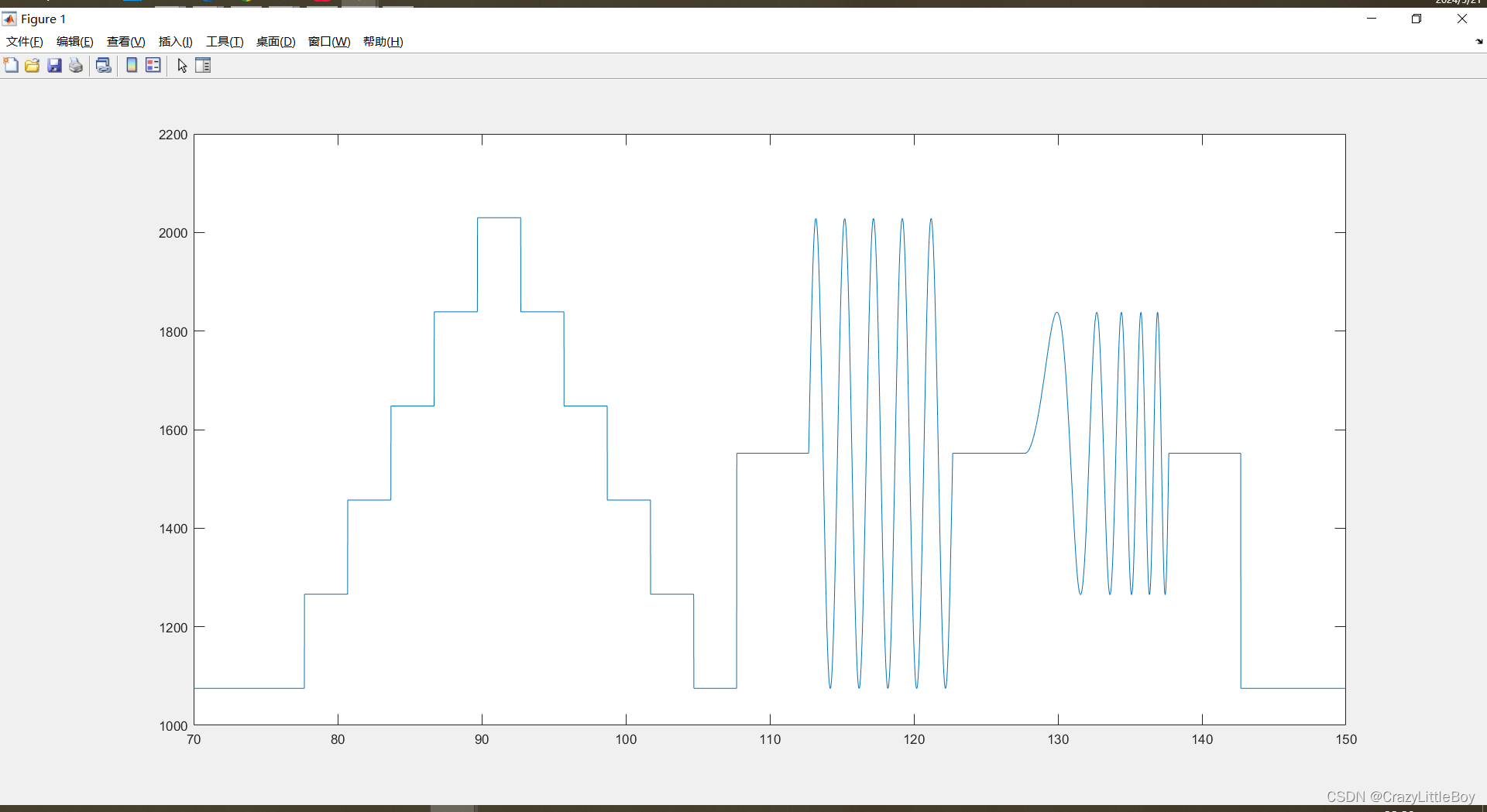
然后會得到一個對應的輸出:
這個輸出肯定不是一個實際的物理對象的輸出,一般情況下,實際輸出和輸入不在一個維度上,比如上邊的小車模型,實際輸出是路程,輸入是加速度,在做控制器的時候,路程和加速度沒法做加減,為什么作加減,閉環控制嘛,就得把輸出送回來和輸入目標值進行對比嘛,那么就得在同一個維度下進行了。為了方便辨識,我們把輸出轉換成輸入相同的維度,這樣就可以直接使用,最后得到的系統輸出的值,就是轉換后,這個在最后不要忘記了。
圖片是為了展示效果,實際上要把數據導入matlab整理好成這樣:

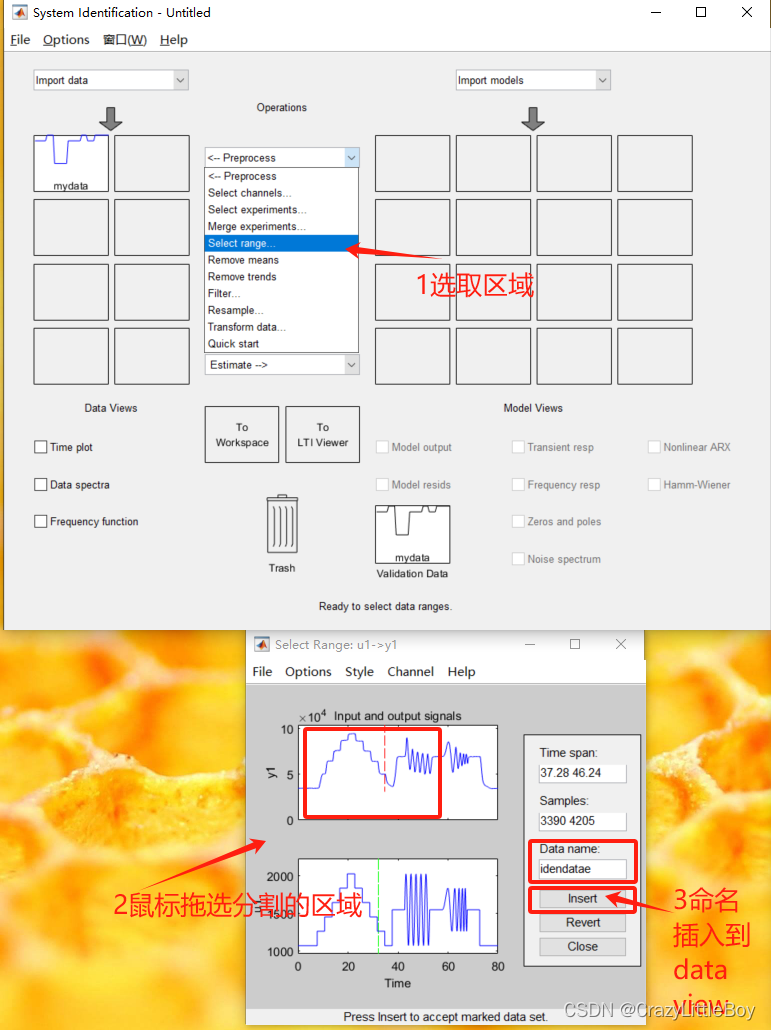
第一步 選取時域數據到app
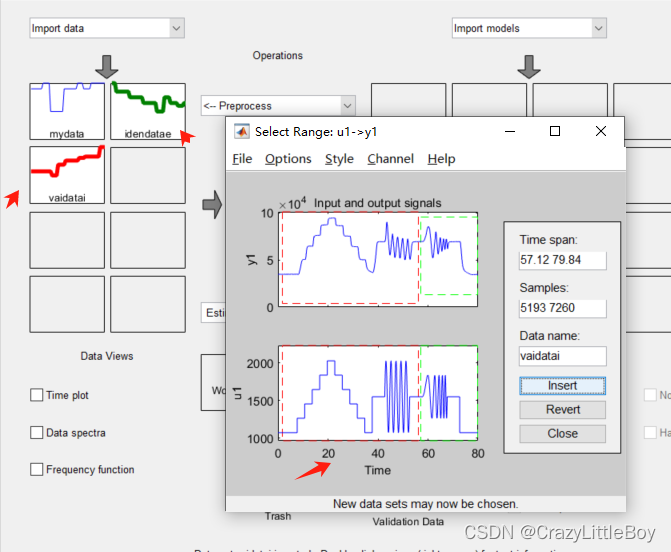
第二步 分割數據
這一步將數據分割成測試集和驗證集
然后就會得到這個狀態:
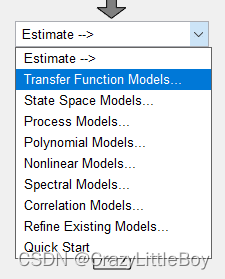
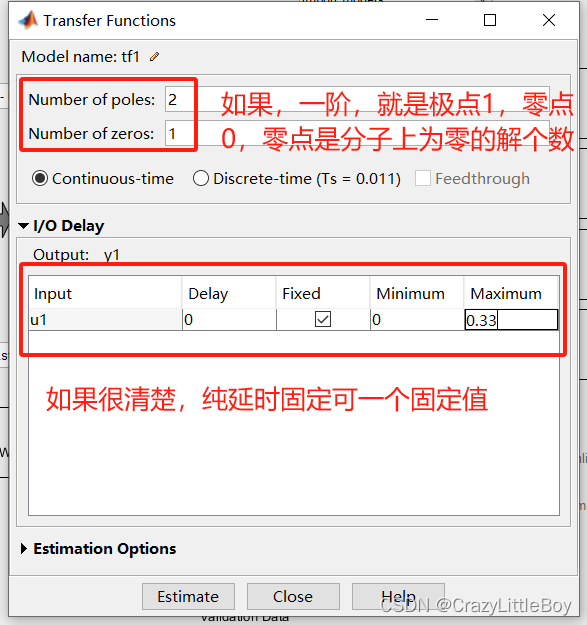
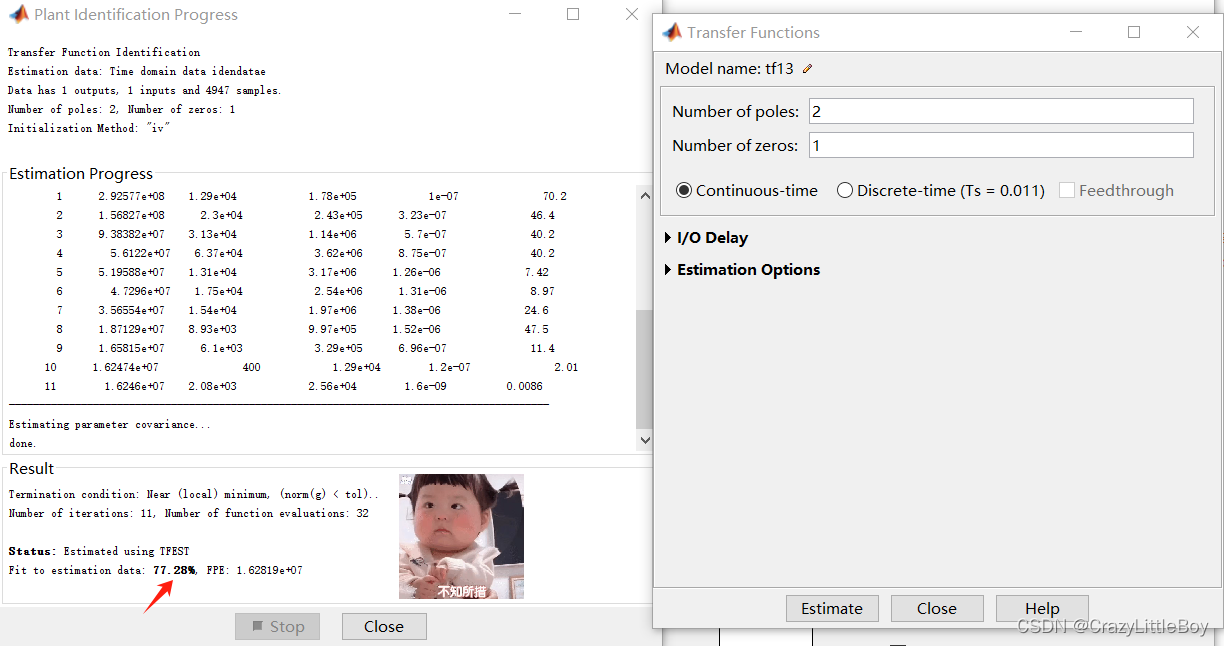
第三步 設置傳遞函數的參數
最保守的就是第一個,或者 process models 比較直觀,或者就是最后一個什么都不用設置
第四步 Estimate
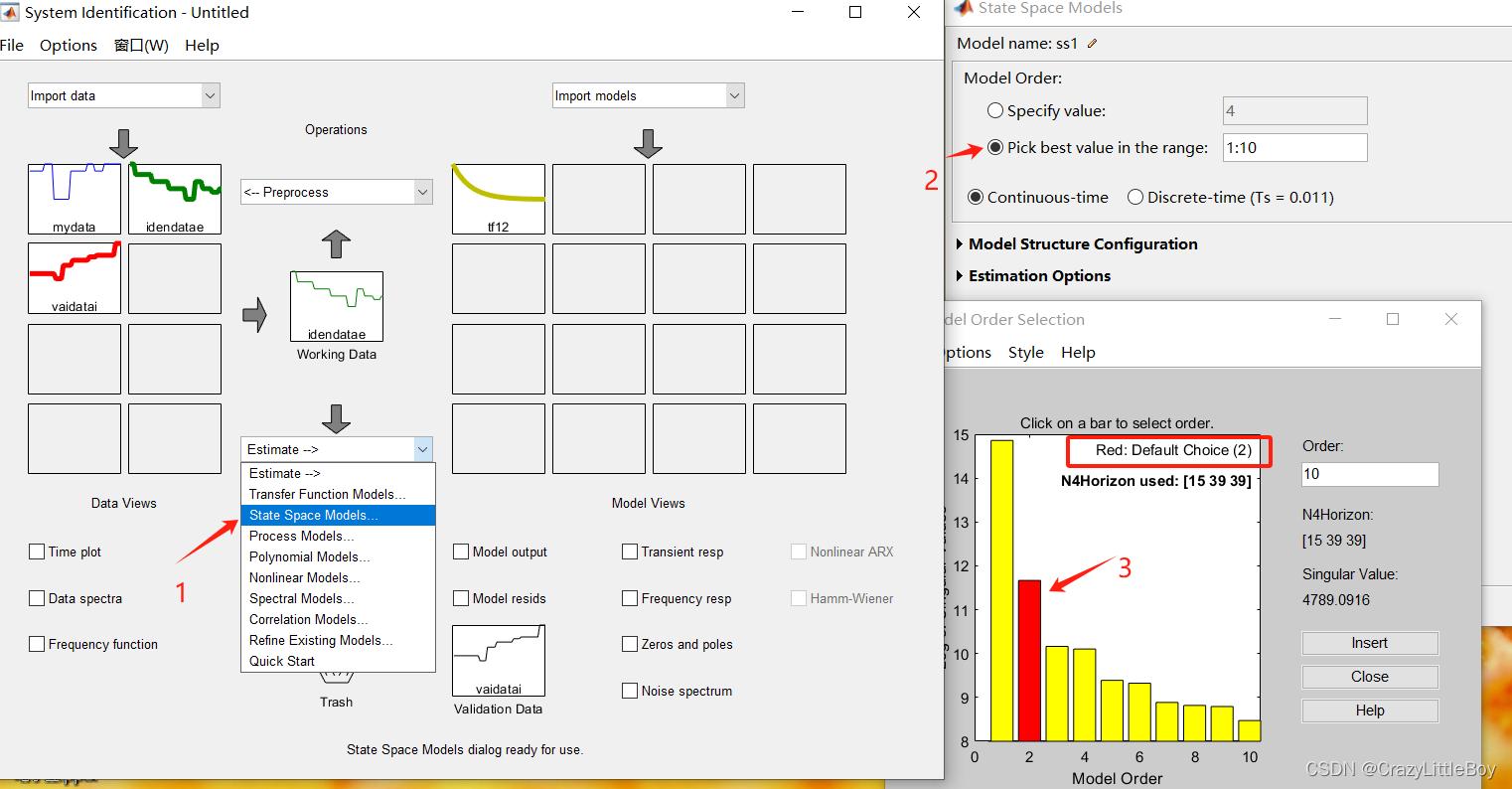
第五步
在選擇階數前可以先用state space model 推薦最合適的階數
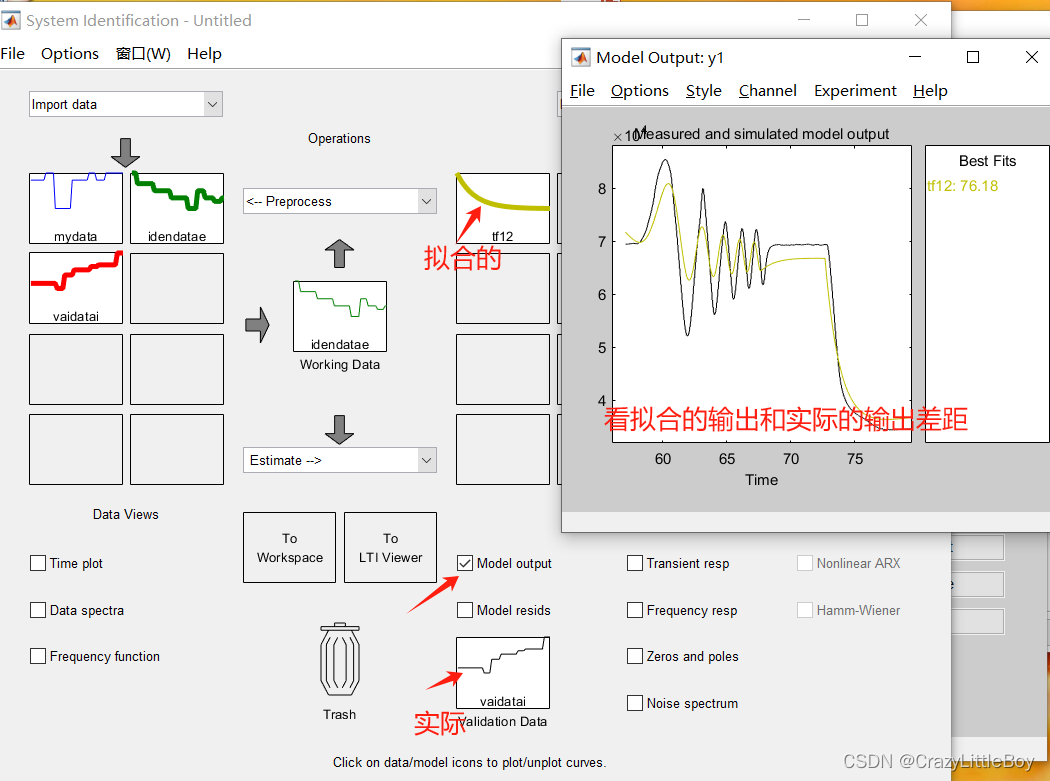
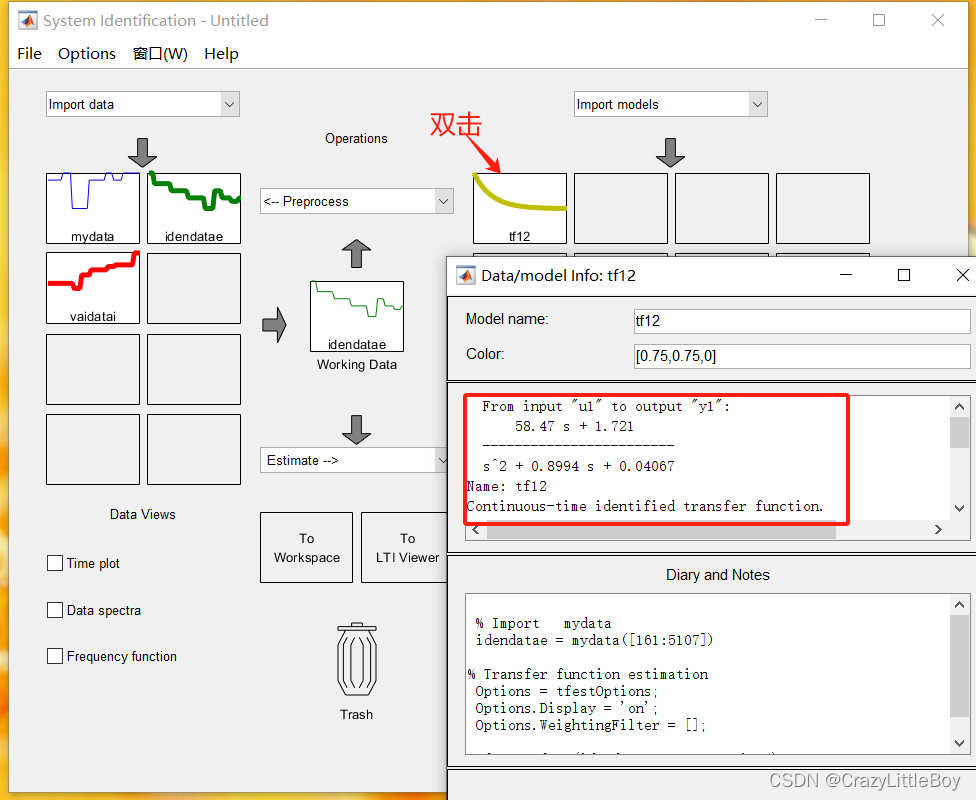
然后就來回試一試,找到擬合度最好的一個模型,那個就是辨識得到的模型:
結束
打完收工,其實得到的模型只是一個輔助,應為采集到的數據到擬合,有很多需要注意的地方,最后得到的模型不一定理想。

)

















