目錄
- 1.算法原理
- 2.二維路徑規劃數學模型
- 3.結果展示
- 4.參考文獻
- 5.代碼獲取
1.算法原理
【智能算法】北方蒼鷹優化算法(NGO)原理及實現
2.二維路徑規劃數學模型
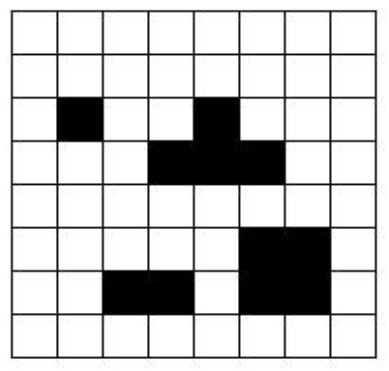
柵格法模型最早由 W.E. Howden 于 1968 年提出,障礙物的柵格用黑色表示,可通過的自由柵格用白色表示。
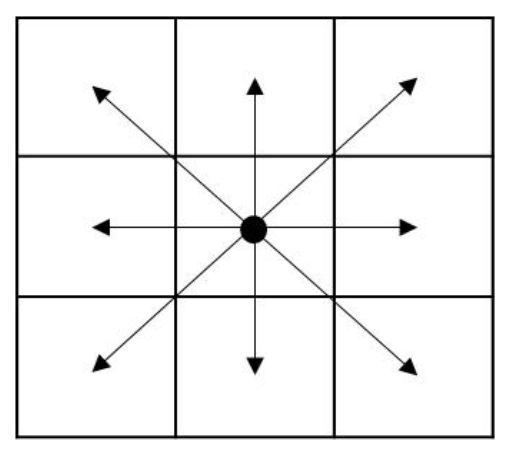
求解二維路徑規劃問題時,一般采用八領域搜索。
優化目標
路徑規劃問題需要考慮三點:
- 全局總路徑最優
- 避免碰撞到障礙物
- 路徑平滑性
全局總路徑最優
考慮路徑規劃問題的全局最優路徑長度最短,適應度函數可以定義為:
F 1 = ∑ i = 0 m ? 1 ( x i + 1 ? x i ) 2 + ( y i + 1 ? y i ) 2 (1) F_1 = \sum_{i = 0}^{m-1}\sqrt{\left( x_{i+1} - x_i \right)^2 + \left( y_{i+1} - y_i \right)^2}\tag{1} F1?=i=0∑m?1?(xi+1??xi?)2+(yi+1??yi?)2?(1)
避免碰撞到障礙物
通常考慮添加懲罰函數,當下一步路徑將與障礙物發生碰撞時,對其進行懲罰:
F 2 = ? ? Q (2) F_2=\phi\cdot Q\tag{2} F2?=??Q(2)
路徑平滑性
通常采用方法包括B樣條曲線、貝塞爾曲線、最小路徑曲率等。
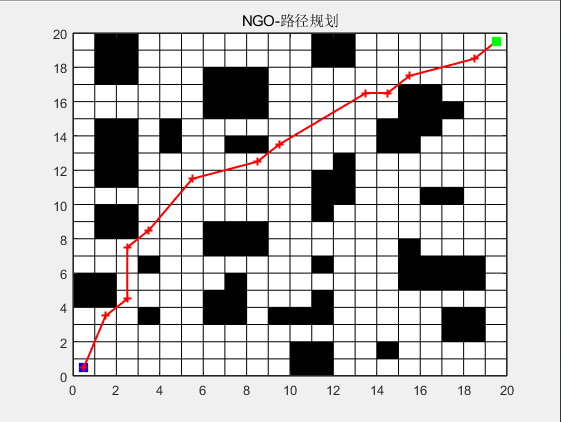
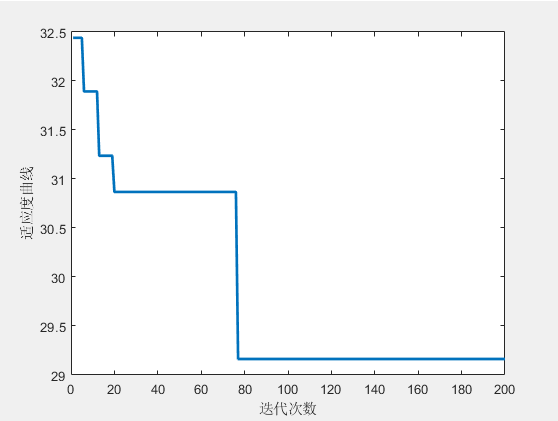
3.結果展示
4.參考文獻
[1] 梁景潤,劉麗桑,陳炯暉,等.多策略優化麻雀搜索算法及其路徑規劃的應用[J].福建理工大學學報,2023,21(06):605-612.
[2] 鄧明杰.面向路徑規劃的群智能優化算法研究[D].江西理工大學,2023.
[3] 張恩浩.基于麻雀搜索算法的移動機器人路徑規劃算法研究[D].重慶理工大學,2022.
5.代碼獲取
資源清單









)









