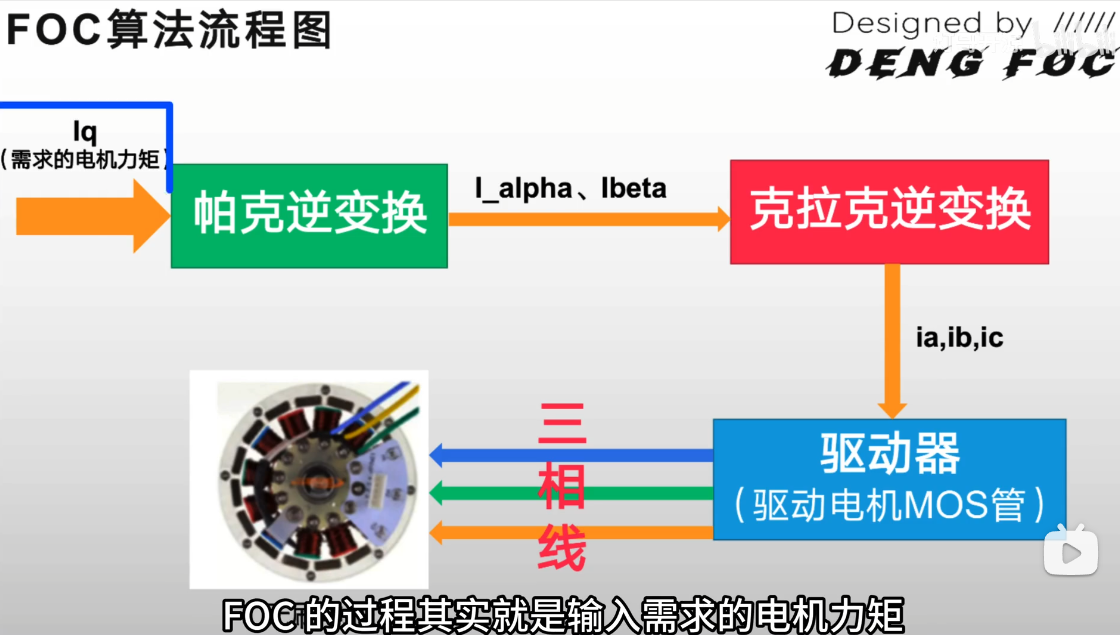
FOC的過程其實就是輸入需求的電機力矩,把需求的電機力矩轉化為三相線電壓輸出,并且讓電機物理輸出你所需求的力矩的過程,這也被稱為電機控制三環中的力矩環,所有后面的位置閉環和速度閉環都得基于這個力矩環,而這個力矩環的算法實際上就是一個無刷電機旋轉狀態的數學模型
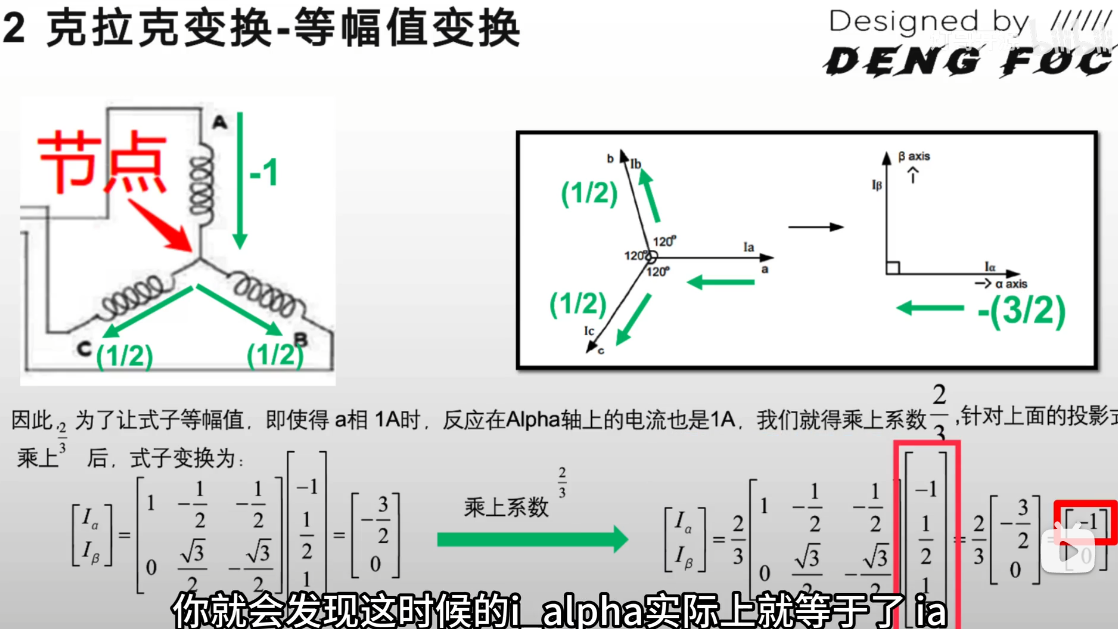
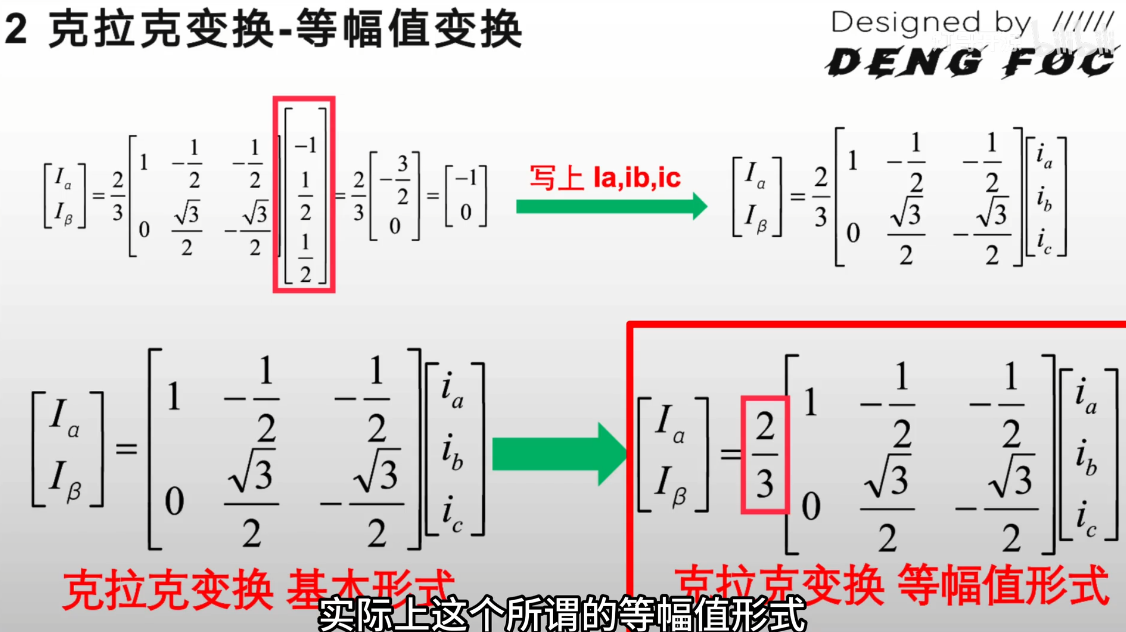
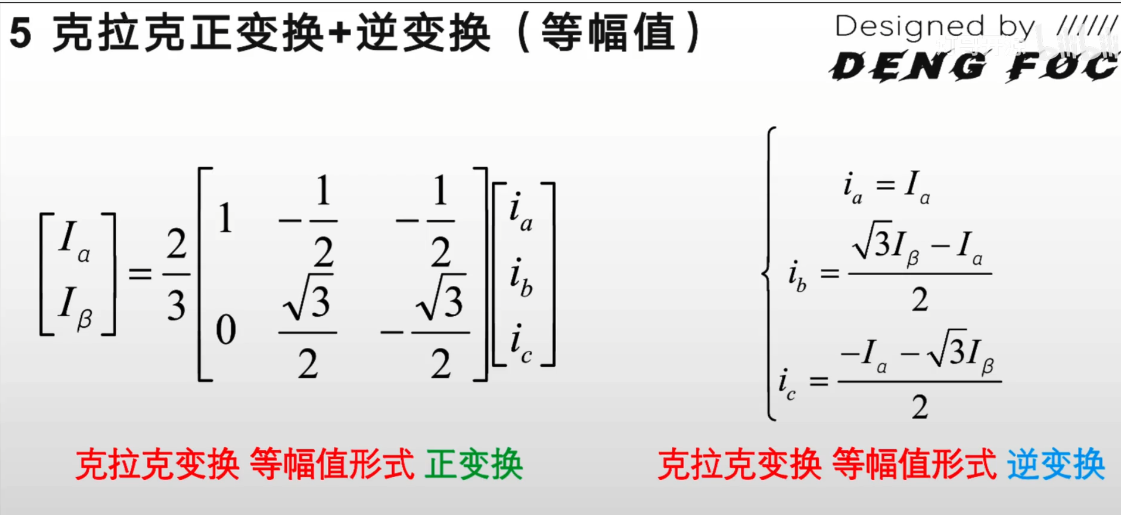
總結一下,實際上這個所謂的等幅值形式,其實就是想建立出一種i_α=i_a 這樣一種簡化的運算環境,為了達到這一點,它給式子乘上了2/3。
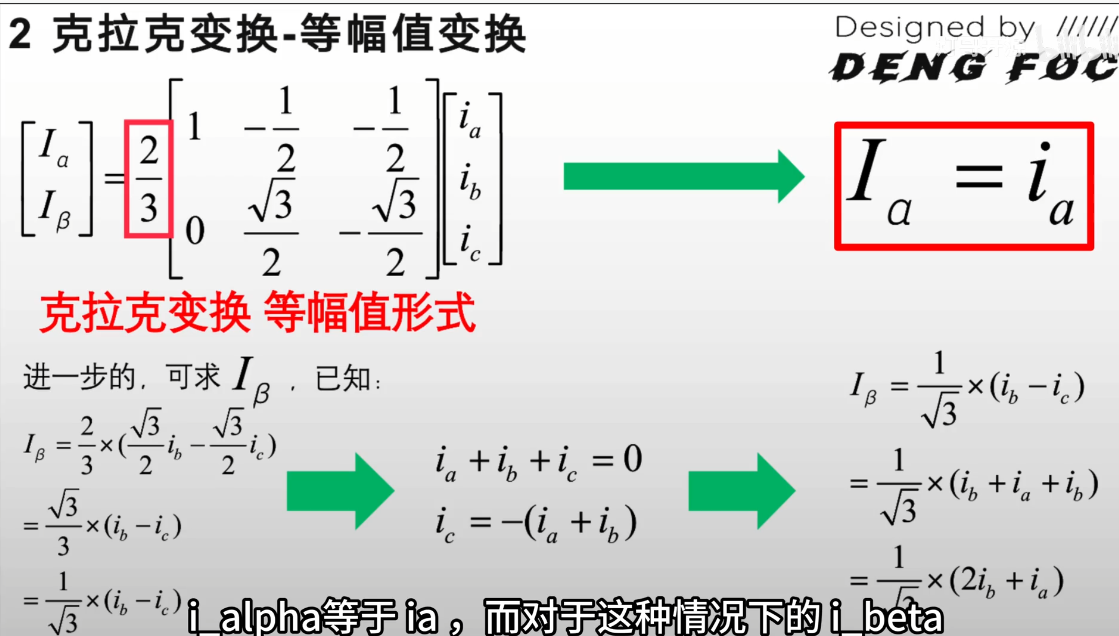
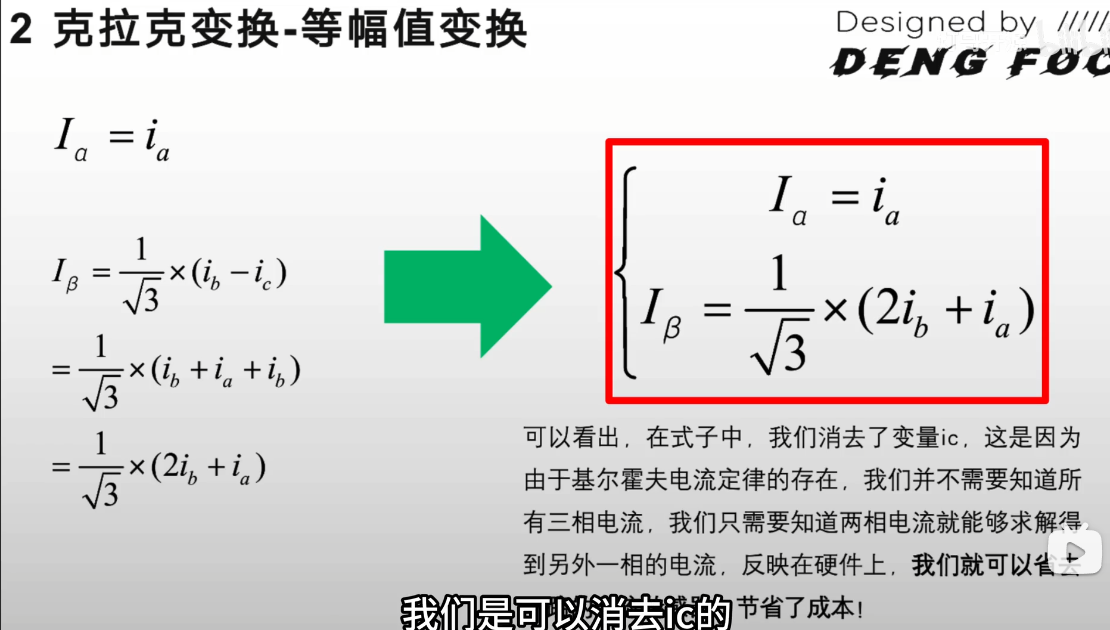
這樣我們就可以得到化簡之后的克拉克等幅值變換形式,由于基爾霍夫電流定理的存在,實際上在整個克拉克變換等幅值形式的變換里面,我們是可以消去ic的,在消去i_c后,Iα和Iβ我們只需要用a,b相的電流就可以算出來了,我們并不需要知道所有的三相電流,只要知道其中的兩相:ia和ib就可以了。
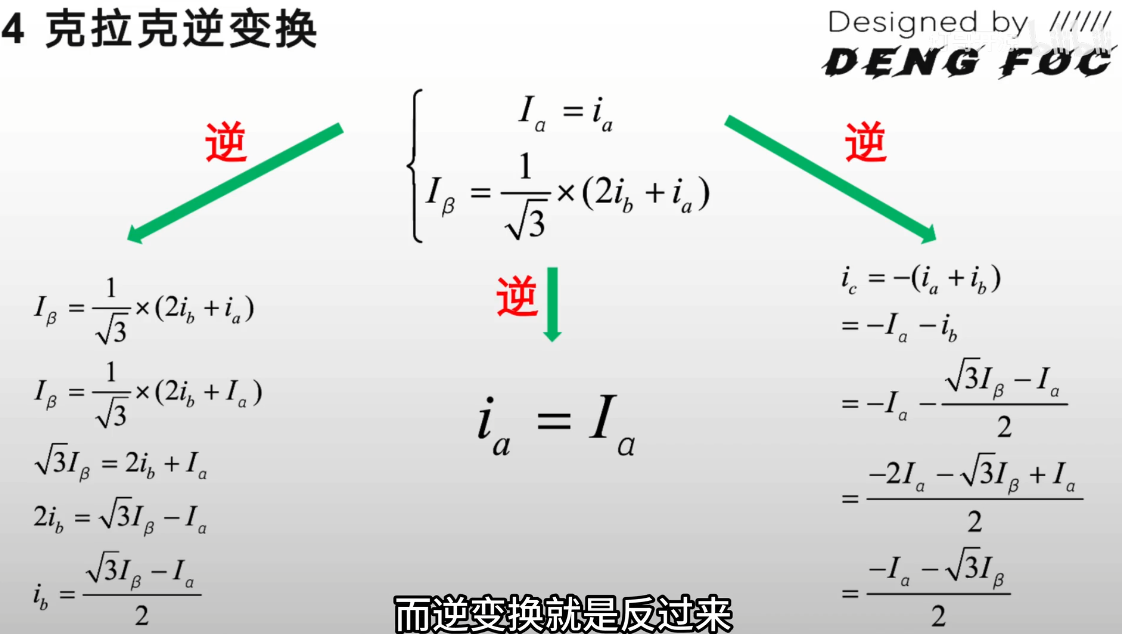
以簡單的二維坐標形式來描述三相電機運轉時的電流情況為我們下一步深入建立電機的運動模型并且實現FOC打下了基礎,但是只有它是不夠的,我們還需要把這個理論和旋轉狀態中的電機對應起來,也就是建立電機旋轉時的數學模型,要實現這一步就要用到帕克變換



![文生3D實戰:用[靈龍AI API]玩轉AI 3D模型 – 第7篇](http://pic.xiahunao.cn/文生3D實戰:用[靈龍AI API]玩轉AI 3D模型 – 第7篇)




)









算法(附matlab代碼))
