一、技術要點
1. 多光譜成像技術 ?
可見光與紅外融合:白天依賴可見光高分辨率成像(識別外形、顏色),夜間或低光照條件下切換至紅外熱成像(捕捉0.5℃級溫差),通過雙波段互補提升全天候能力。 ?
激光測距輔助:集成激光測距模塊(如905nm/1535nm波長),實現厘米級精度測距(±0.3mm至±2m),支持動態聚焦與運動軌跡預測。 ?
多光譜特征分析:結合紫外/短波紅外(SWIR)波段,穿透煙霧、霧霾,提升復雜環境目標識別率。
2. 圖像穩定與跟蹤控制 ?
視軸穩定技術:采用兩軸四框架穩定平臺,通過自抗擾控制器(ADRC)和降階擴張狀態觀測器(ESO)抑制載機振動,擾動隔離度提升54.67%,視軸抖動控制在微弧度級(μrad)。 ?
動態跟蹤算法:基于卡爾曼濾波與AI預測(如LSTM),對≤20m/s高速目標跟蹤誤差<0.3cm,支持突發機動目標鎖定。
3. 智能識別算法 ?
多模態特征融合:融合外形(可見光)、熱輻射(紅外)、運動軌跡(雷達)數據,通過CNN+GRU網絡實現99.3%的無人機-鳥類區分準確率。 ?
微特征增強:針對弱紅外目標(如塑料機身),采用輻射數學建模增強信號,結合深度學習提取旋翼微多普勒特征。
4. 模塊化集成設計 ?
輕量化結構:光學接收口徑Φ14mm-Φ36mm可調,重量梯度覆蓋33g(微型)至240g(遠距),支持防爆/防水封裝。 ?
接口與協議:支持TTL/RS485/藍牙5.0/LoRaWAN,兼容雷達、頻譜儀多傳感器組網。
表:光電探測模塊多光譜技術對比*

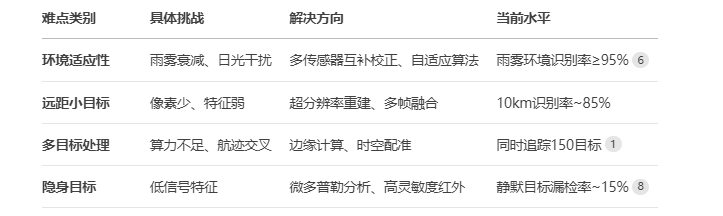
二、技術難點
1. 復雜環境適應性 ?
氣象干擾:雨霧衰減激光信號(衰減率≥50%),需多源數據互補校正;強日光下紅外熱成像信噪比下降>40%,依賴自適應環境補償算法。 ?
電磁干擾:城市多徑效應導致定位漂移,需空時自適應處理(STAP)抑制雜波。
2. 遠距離小目標探測 ?
光學衍射極限:10km外無人機成像僅占數個像素,需超分辨率重建(如GAN網絡)提升識別率。?
數據集缺失:遠距離小目標樣本不足,制約AI模型泛化能力,需合成孔徑雷達(SAR)數據輔助訓練。
3. 實時多目標處理 ?
算力瓶頸:同時追蹤>150個目標時,圖像處理延遲>200ms,需邊緣計算(如Jetson AGX)本地化處理。 ?
航跡關聯:密集目標群航跡交叉引發誤關聯,需時空配準+特征融合技術。
4. 抗干擾與隱身目標 ?
靜默無人機:無射頻信號+低熱輻射目標,依賴雷達微動特征(旋翼轉速)識別,誤檢率>15%。?
主動對抗:無人機搭載激光致盲器反制光電系統,需抗飽和成像與快速濾光切換。
表:光電探測核心難點及解決方向
三、運行方式
1. 掃描搜索模式 ?
廣域凝視掃描:可見光/紅外相機以5°–30°/s角速度周掃,激光測距模塊同步觸發,發現目標后轉入跟蹤模式。 ?
智能預警:AI實時分析圖像,觸發威脅分級告警(如聲光/APP推送),響應時間<2秒。
2. 智能跟蹤模式 ?
閉環跟蹤:光電轉臺鎖定目標后,通過PID-ADRC雙環控制保持視軸穩定,激光持續測距更新軌跡。 ?
多傳感器協同:雷達提供初始坐標→光電精確定位→激光測距輸出三維坐標,形成“探測-識別-定位”閉環。
3. 組網融合模式 ?
陣列化布站:多節點(m×n陣列)通過三角測量提升定位精度(水平≤3°,俯仰≤5°),50m間距布站時定位誤差<0.2m。 ?
自適應加權融合:各節點數據經坐標轉換(大地坐標系→中心站坐標系),按測量方差分配權值,融合后定位精度提升40%。



)




)







方法的作用和場景說明)



