1.環境搭建
在工作空間src下git wpr_simulation,安裝install_for_noetic.sh,然后再回退工作空間進行編譯
下載參數文件
git clone https://github.com/6-robot/wpb_home.git
下載需要魔法,在這里可以使用手機熱點進行平替
 進入腳本文件夾
進入腳本文件夾
cd wpb_home/wpb_home_bringup/scripts/
執行依賴項安裝程序
./install_for_noetic.sh2.代碼編寫
新建包
catkin_create_pkg nav_pkg roscpp rospy move_base_msgs actionlib編寫launch文件
<launch><node pkg="move_base" type="move_base" name="move_base"><rosparam file="$(find wpb_home_tutorials)/nav_lidar/costmap_common_params.yaml" command="load" ns="global_costmap" /><rosparam file="$(find wpb_home_tutorials)/nav_lidar/costmap_common_params.yaml" command="load" ns="local_costmap" /><rosparam file="$(find wpb_home_tutorials)/nav_lidar/global_costmap_params.yaml" command="load" /><rosparam file="$(find wpb_home_tutorials)/nav_lidar/local_costmap_params.yaml" command="load" /><param name="base_global_planner" value="global_planner/GlobalPlanner" /> <param name="base_local_planner" value="wpbh_local_planner/WpbhLocalPlanner" /></node><node pkg="map_server" type="map_server" name="map_server" args="$(find wpr_simulation)/maps/map.yaml"/><node pkg="amcl" type="amcl" name="amcl"/></launch>tree一下文件結構
nav_pkg
├── CMakeLists.txt
├── include
│?? └── nav_pkg
├── launch
│?? └── nav.launch
├── package.xml
└── src
啟動仿真環境
roslaunch wpr_simulation wpb_stage_robocup.launch 新建終端執行導航命令
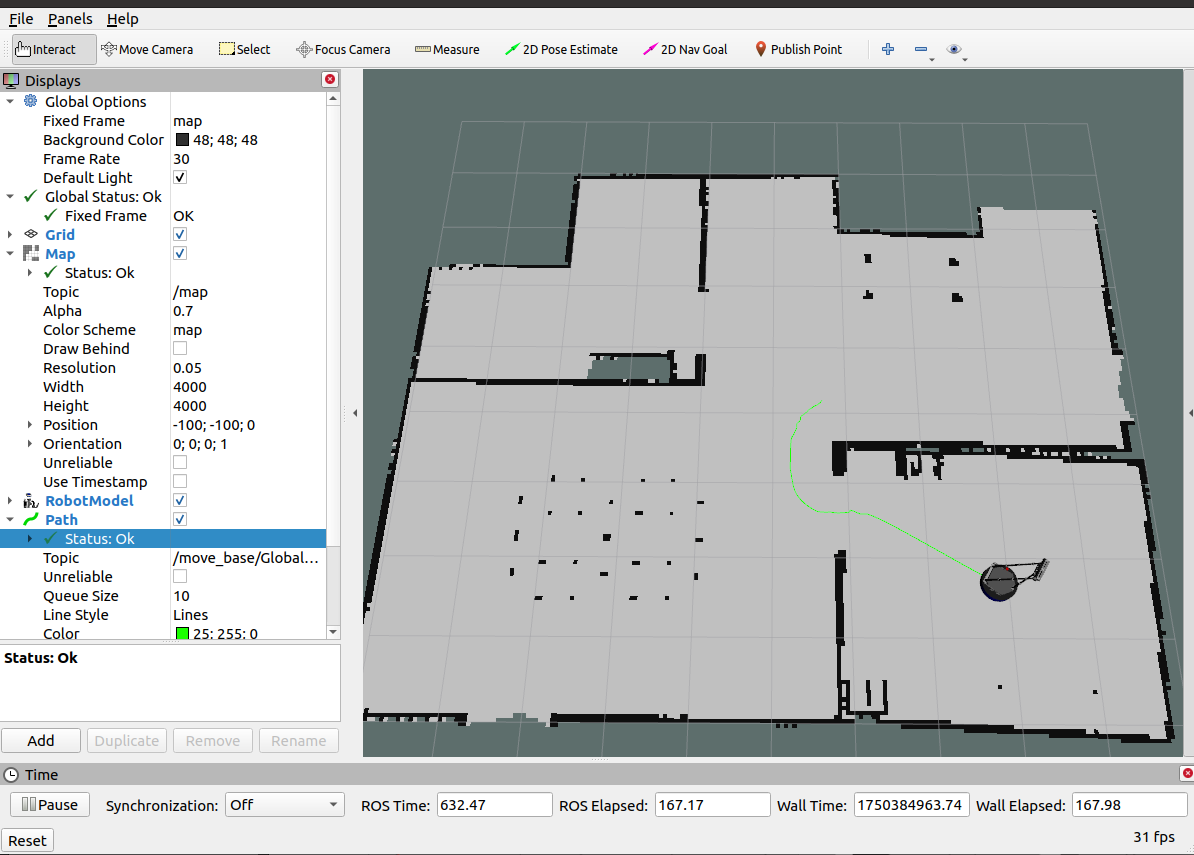
roslaunch nav_pkg nav.launch 再新建終端,打開可視化界面
rvizadd path map robotmodel ,再使用上面欄的2D Nav Goal給出目標地點
3.Amcl可視化
增加Posearray,并訂閱、、、相關話題

 ?
?
)



)








)

)

核心邏輯:通過多層非線性變換,讓模型自動學習從原始數據到高層特征的映射。為什么多層非線性變換可以達到這樣的效果?)
)
