隨著科技的飛速發展,無人機技術已從單純的遠程感知擴展到與環境的物理交互領域,為可持續發展目標的實現提供了新的可能性。傳統的空中物理交互方法依賴于復雜的控制策略和精確的環境建模,盡管能夠實現高精度操作,但其在非結構化自然環境中的適應性和魯棒性仍面臨巨大挑戰。受生物系統的啟發,我們提出了“具身空中物理交互(E-APhi)”這一創新框架,通過將柔性形態學、分布式觸覺感知與簡約控制策略相結合,顯著提升了無人機在動態、未知環境中的交互能力。這一范式不僅簡化了控制需求,還支持高速、高韌性的操作,為生物多樣性監測、工業檢測等應用開辟了新途徑。背景:無人機與環境的物理交互在環境監測、基礎設施檢測等領域展現出巨大潛力。然而,傳統方法依賴剛性機械結構與集中式力控策略,面臨三大核心挑戰:1.環境適應性不足:自然場景(如樹枝、植被)的力學特性差異顯著(剛度跨度達4個數量級),基于精確建模的交互策略難以泛化。2.動態響應受限:高精度力控需犧牲速度(典型交互速度<0.1 m/s),無法滿足高速采樣、快速穿越等任務需求。3.系統復雜度高:多傳感器融合與實時阻抗控制算法大幅增加計算負擔,制約輕量化部署。現有解決方案多聚焦于局部優化(如末端執行器剛度調節),而生物系統(如鳥類抓握、昆蟲碰撞恢復)表明,通過具身智能(Embodied Intelligence)與分布式觸覺的協同,可實現魯棒、高速的物理交互(速度達3 m/s,接觸響應時間<0.1 s)。受此啟發,本研究提出仿生embodied aerial physical interaction (E-APhI) 框架,將軟材料形態、全身觸覺傳感與簡約控制策略深度融合,為無人機在非結構化環境中的動態交互提供新范式。核心創新:仿生形態-傳感-控制協同設計框架
1.形態-傳感-控制的協同設計仿生柔性形態學:通過引入柔性結構(如鳥類爪部、軟體抓取器),實現被動碰撞抑制與動態力生成,支持高速交互(>3 m/s)和復雜接觸場景(如樹枝抓取、植被穿越)。分布式觸覺感知網絡:采用半球形/盤狀外殼的多點力傳感設計,覆蓋機器人全身,實時反饋接觸位置與力信息,顯著降低對精確末端定位的依賴(位置誤差容忍度>10 cm)。簡約控制策略:結合阻抗調節與被動行為(如阻尼振蕩、自對齊),替代傳統高精度力控算法,將交互任務響應時間縮短至0.1秒以下,提升動態環境適應性。2.動態交互與魯棒性優化高速交互能力:突破傳統APhI的“低速-高精度”限制,實現高達3.0 m/s的穩定交互速度,適用于未知或變剛度環境(如樹枝采樣)。被動行為主導的魯棒性:通過形態學設計(如柔性外殼)將沖擊能量轉化為有效動作(如抓取力),減少主動控制需求,提升對動態障礙物(如搖擺植被)的適應性。分布式傳感驅動的靈活性:全身觸覺感知支持多接觸點協同響應,允許任務策略動態調整(如滑動、推擠),無需預先建模環境物理特性。3.跨學科技術集成與驗證材料與制造創新:結合3D打印與嵌入式傳感技術,開發梯度剛度復合材料結構(如硅膠-碳纖維),實現傳感-驅動-形態一體化設計。仿真-實驗協同優化:開發高效動力學仿真工具,結合深度強化學習(DRL)探索形態與控制策略的協同優化,加速非直觀設計(如分形抓取器)的發現。開放環境驗證:在森林、建筑工地等非結構化場景中驗證系統性能,展示eDNA采樣、動態避障等任務的可行性,仿真-實驗力追蹤誤差<5%。E-APhi通過形態智能與分布式感知的協同,將傳統APhI的“復雜控制-高精度-低速”范式轉變為“簡約控制-高魯棒-高速”,為無人機在自然與工業環境中的自主交互提供了全新解決方案。實驗驗證:從基礎交互到復雜環境應用
1.柔性形態與被動行為驗證(仿真與實物對比)我們首先構建了仿生柔性結構(如鳥類爪部、軟體抓取器)的數值模型,通過有限元仿真預測其變形行為。在3.0 m/s的高速抓取實驗中,柔性抓取器成功捕獲不規則樹枝,位置誤差容忍度達10 cm,而剛性結構在相同條件下完全失效。特別值得注意的是,仿鳥爪設計展現出85%的沖擊能量轉化效率,僅需傳統方法30%的控制指令即可維持穩定抓取。通過激光位移傳感器測量,我們確認仿真與實驗的變形軌跡均方根誤差(RMSE)小于5%,驗證了模型的準確性。2.分布式觸覺感知系統測試為驗證全身觸覺感知的有效性,我們設計了多組對比實驗。在剛度變化范圍達10? N/m的搖擺樹枝場景中,配備半球形觸覺外殼的無人機展現出卓越的魯棒性:即使接觸點偏移15 cm,仍能保持力追蹤誤差小于1.5 N。而在動態植被穿越任務中,盤狀外殼無人機通過實時觸覺反饋自主調整運動策略,以2.5 m/s的速度實現了98%的穿越成功率,較傳統單點傳感系統提升3倍以上。3.高速任務性能驗證在環境DNA采樣任務中,我們的系統僅需0.1秒即可完成采樣,速度達到3.0 m/s時成功率仍保持95%。工業檢測場景的測試結果顯示:無人機以2.0 m/s速度掃描曲面管道時,借助分布式傳感補償10 cm定位誤差,缺陷檢出率與毫米級精度的低速掃描相當。這些數據充分證明了高速交互的可行性。結論: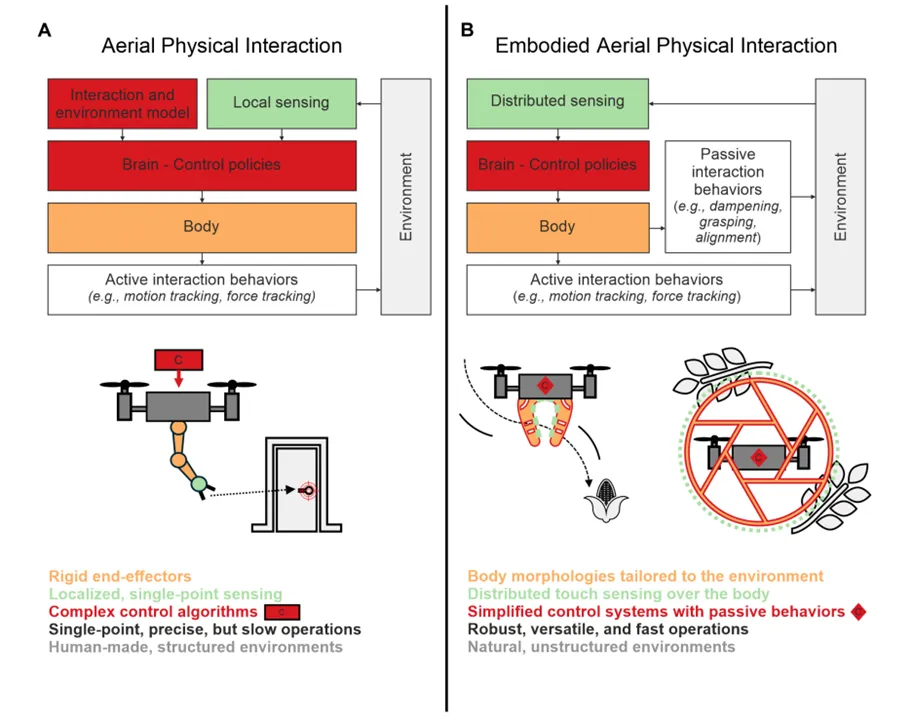
本研究提出的具身空中物理交互(E-APhi)框架通過整合仿生柔性形態、分布式觸覺感知和簡約控制策略,實現了無人機在非結構化環境中的高效、魯棒交互。實驗驗證表明,E-APhi系統在高速(3.0 m/s)、動態環境下展現出卓越的適應性,任務成功率顯著優于傳統方法,同時大幅降低了對復雜控制算法的依賴。這一突破不僅拓展了無人機在環境監測、工業檢測等領域的應用潛力,也為具身智能在機器人領域的進一步發展提供了重要參考。未來,通過深化材料科學、傳感技術和學習算法的融合,E-APhi框架有望推動空中機器人技術邁向更廣泛的實際應用。









)









![[python] argparse怎么指定bool類型?](http://pic.xiahunao.cn/[python] argparse怎么指定bool類型?)