一、背景介紹
在智能制造領域,機器視覺檢測與 PLC 控制的無縫集成是實現自動化生產線閉環控制的關鍵。本文將詳細介紹如何使用 C# 開發上位機系統,實現 Cognex VisionPro 視覺系統與西門子 S7 PLC 的數據交互,打造高效、穩定的工業檢測方案。
二、系統架構設計
1. 硬件組成
- 工業相機:Cognex DM 系列智能相機(分辨率 1280×1024,幀率 30FPS)
- 光源系統:環形 LED 光源(可調亮度,消除反光)
- PLC 控制器:西門子 S7-1200(CPU 1214C DC/DC/DC)
- 工控機:研華 IPC-610L(i7 處理器,8GB RAM,Windows 10 系統)
2. 軟件架構
┌───────────────────────────────────────────┐
│ 上位機應用 (C#) │
│ ┌───────────────┐ ┌───────────────────┐ │
│ │ VisionPro接口 │ │ PLC通信模塊 │ │
│ │ (Cognex DLL) │ │ (S7.NET庫) │ │
│ └───────────────┘ └───────────────────┘ │
└───────────────────┬───────────────────────┘│
┌───────────────────┼───────────────────────┐
│ ▼ │
│ ┌─────────────────────┐ ┌──────────────┐ │
│ │ VisionPro軟件 │ │ PLC編程軟件 │ │
│ │ (Cognex Designer) │ │ (TIA Portal) │ │
│ └─────────────────────┘ └──────────────┘ │
└───────────────────┬───────────────────────┘│
┌───────────────────┼───────────────────────┐
│ ▼ │
│ ┌─────────────────────┐ ┌──────────────┐ │
│ │ 工業相機 │ │ PLC硬件 │ │
│ └─────────────────────┘ └──────────────┘ │
└───────────────────────────────────────────┘
三、VisionPro 項目開發
1. 創建檢測任務
在 VisionPro Designer 中完成以下操作:
- 配置相機參數(曝光時間、增益、觸發模式)
- 設計定位工具(PatMax 模式匹配)
- 添加測量工具(卡尺、邊緣檢測)
- 設置缺陷檢測算法(Blob 分析、灰度對比)
- 導出 C# 代碼模板
2. 關鍵代碼分析
以下是 VisionPro C# 接口的核心代碼:
// 初始化VisionPro應用
private CogApplication cogApp;
private CogAcqFifoTool acqFifoTool;
private CogPMAlignTool pmAlignTool;
private CogBlobTool blobTool;// 加載VPP項目文件
private void LoadVisionProProject(string projectPath)
{cogApp = new CogApplication();cogApp.LoadFromFile(projectPath);// 獲取各工具引用acqFifoTool = cogApp.Tools["AcqFifoTool"] as CogAcqFifoTool;pmAlignTool = cogApp.Tools["PMAlignTool"] as CogPMAlignTool;blobTool = cogApp.Tools["BlobTool"] as CogBlobTool;
}// 執行視覺檢測
public VisionResult RunInspection()
{// 觸發圖像采集acqFifoTool.Run();CogImage8Grey image = acqFifoTool.OutputImage as CogImage8Grey;// 執行定位pmAlignTool.InputImage = image;pmAlignTool.Run();// 執行缺陷檢測blobTool.InputImage = image;blobTool.Offset = pmAlignTool.Results.GetPose(0);blobTool.Run();// 返回檢測結果return new VisionResult{IsPass = blobTool.Results.GetBlobs().Count == 0,DefectCount = blobTool.Results.GetBlobs().Count,InspectionTime = DateTime.Now};
}
四、PLC 通信實現
1. 通信協議選擇
采用S7.NET庫實現 C# 與 Siemens S7 PLC 的通信,支持以下協議:
- S7-200 SMART:S7.NET的 S7200SmartPlc 類
- S7-1200/1500:S7.NET的 S71200Plc 類
- 通信方式:TCP/IP(默認端口 102)
2. 核心通信代碼
using S7.Net;public class PlcController : IDisposable
{private Plc plc;// 初始化PLC連接public bool Connect(string ipAddress, CpuType cpuType = CpuType.S71200){try{plc = new Plc(cpuType, ipAddress, 0, 1);plc.Open();return plc.IsConnected;}catch (Exception ex){Console.WriteLine($"PLC連接失敗: {ex.Message}");return false;}}// 讀取PLC數據public bool[] ReadInputBits(int startAddress, int count){if (!plc.IsConnected) return null;try{var data = plc.DBRead(1, startAddress, VarType.Bit, count);return data.Cast<bool>().ToArray();}catch (Exception ex){Console.WriteLine($"讀取PLC數據失敗: {ex.Message}");return null;}}// 寫入PLC數據public bool WriteOutputBits(int startAddress, bool[] values){if (!plc.IsConnected) return false;try{plc.DBWrite(1, startAddress, values);return true;}catch (Exception ex){Console.WriteLine($"寫入PLC數據失敗: {ex.Message}");return false;}}// 釋放資源public void Dispose(){plc?.Close();plc?.Dispose();}
}
五、集成控制流程
1. 數據交互流程設計
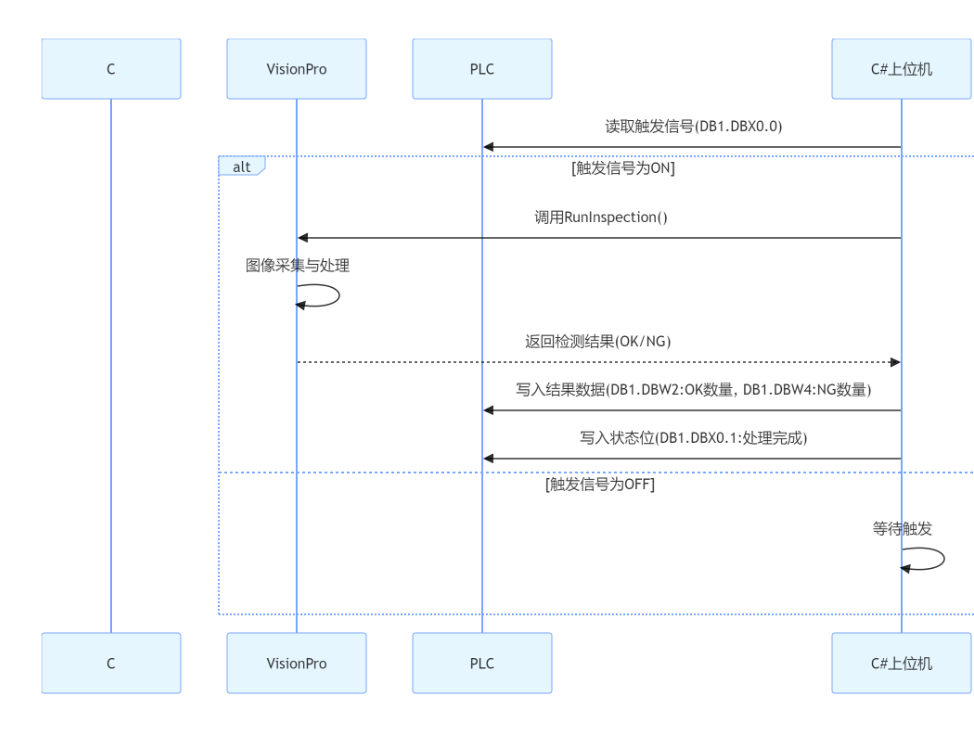
sequenceDiagramparticipant C#上位機participant VisionProparticipant PLCC#上位機->>PLC: 讀取觸發信號(DB1.DBX0.0)alt 觸發信號為ONC#上位機->>VisionPro: 調用RunInspection()VisionPro->>VisionPro: 圖像采集與處理VisionPro-->>C#上位機: 返回檢測結果(OK/NG)C#上位機->>PLC: 寫入結果數據(DB1.DBW2:OK數量, DB1.DBW4:NG數量)C#上位機->>PLC: 寫入狀態位(DB1.DBX0.1:處理完成)else 觸發信號為OFFC#上位機->>C#上位機: 等待觸發end
2. 主控制邏輯
public class VisionSystem
{private readonly PlcController plcController;private readonly VisionProController visionProController;private Timer inspectionTimer;// 系統初始化public void Initialize(string plcIp, string visionProProjectPath){// 初始化PLC控制器plcController = new PlcController();plcController.Connect(plcIp);// 初始化VisionPro控制器visionProController = new VisionProController();visionProController.LoadVisionProProject(visionProProjectPath);// 設置定時檢查PLC觸發信號inspectionTimer = new Timer(CheckTriggerSignal, null, 0, 100); // 每100ms檢查一次}// 檢查PLC觸發信號private void CheckTriggerSignal(object state){if (!plcController.IsConnected) return;// 讀取PLC觸發位(DB1.DBX0.0)var triggerBits = plcController.ReadInputBits(0, 1);if (triggerBits != null && triggerBits[0]){// 執行視覺檢測var result = visionProController.RunInspection();// 寫入檢測結果到PLCplcController.WriteOutputBits(2, new bool[] { result.IsPass }); // DB1.DBX2.0:檢測結果plcController.WriteOutputBits(3, new bool[] { false }); // DB1.DBX3.0:重置觸發信號}}
}
六、實戰案例:電子元件外觀檢測
1. 項目需求
- 檢測 PCB 板上的 IC 芯片是否存在引腳變形、缺件等缺陷
- 檢測速度:≥10 件 / 秒
- 缺陷精度:≥0.1mm
2. 解決方案
- 硬件配置:Basler ace 相機 + 環形光源,Siemens S7-1200 PLC 控制流水線
- 軟件實現:
- VisionPro:使用 PatMax 定位芯片,Blob 分析檢測引腳缺陷
- C# 上位機:通過S7.NET與 PLC 通信,實現觸發控制與結果反饋
- 性能指標:檢測準確率 99.8%,單幀處理時間≤80ms
3. 界面設計
csharp
// 創建WPF界面顯示檢測結果
public partial class MainWindow : Window
{private VisionSystem visionSystem;public MainWindow(){InitializeComponent();visionSystem = new VisionSystem();}private void btnStart_Click(object sender, RoutedEventArgs e){// 啟動系統visionSystem.Initialize(txtPlcIp.Text, txtVisionProPath.Text);lblStatus.Content = "系統運行中...";}// 實時更新檢測結果顯示private void UpdateResultDisplay(VisionResult result){Dispatcher.Invoke(() =>{imgResult.Source = result.Image;lblResult.Content = result.IsPass ? "合格" : "不合格";lblDefectCount.Content = result.DefectCount.ToString();});}
}
七、常見問題與解決方案
-
通信不穩定
- 原因:網絡波動、PLC 程序沖突
- 解決方案:增加心跳包機制,設置超時重連,優化 PLC 程序中的通信處理。
-
視覺檢測誤判
- 原因:光照變化、相機抖動
- 解決方案:添加動態閾值算法,使用機械臂固定相機位置,增加光源穩定性。
-
系統響應延遲
- 原因:上位機性能不足、算法復雜度高
- 解決方案:升級硬件配置,優化 VisionPro 算法(減少不必要的工具),采用多線程處理。
八、總結與展望
本文詳細介紹了基于 VisionPro 和 C# 實現機器視覺與 PLC 集成的完整方案,包括系統架構設計、VisionPro 項目開發、PLC 通信實現及實際案例應用。通過這種集成方式,可顯著提高工業生產線的自動化水平和檢測精度。
未來趨勢方面,結合深度學習的缺陷檢測(如使用 YOLO 模型)和基于 OPC UA 的跨平臺通信將成為主流,進一步提升智能制造的柔性化和智能化程度。
參考文獻
- Cognex VisionPro 官方文檔
- S7.NET開源庫文檔(GitHub - S7NetPlus/s7netplus: S7.NET+ -- A .NET library to connect to Siemens Step7 devices)
- 西門子 S7 PLC 通信協議規范








Java學習-5.14(注冊,鹽值加密,模糊查詢))










