【聲明】
????????本博客僅用于記錄博主學習內容、分享筆記經驗,不得用作其他非學術、非正規用途,不得商用。本聲明對本博客永久生效,若違反聲明所導致的一切后果,本博客均不負責。
目錄
【聲明】
一、搭建第一個仿真模型
二、模塊操作
2.1、模塊之間的連接方法
2.2、模塊的復制方法
2.3、模塊的插入
2.4、連線分支和連線改變
2.5、信號組合
三、運行仿真
3.1、求解器
3.2、仿真步長
一、搭建第一個仿真模型
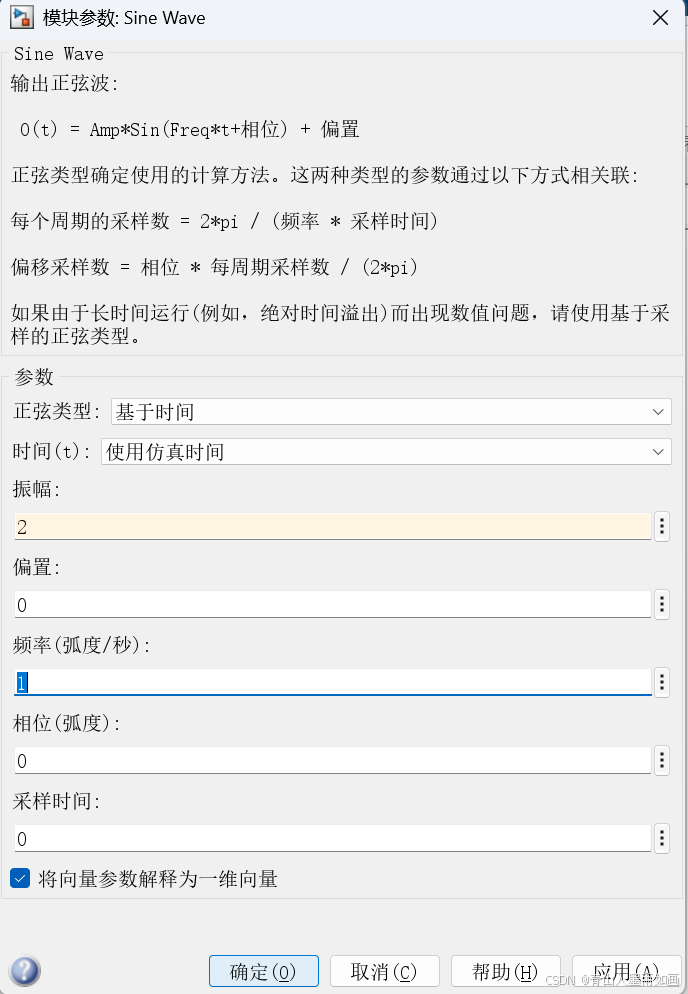
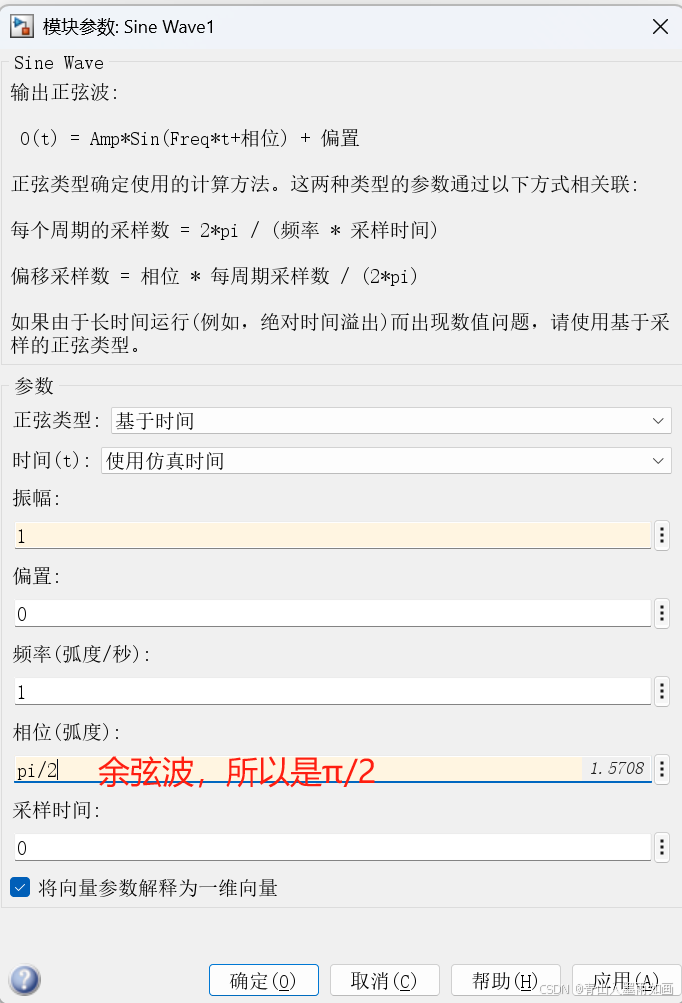
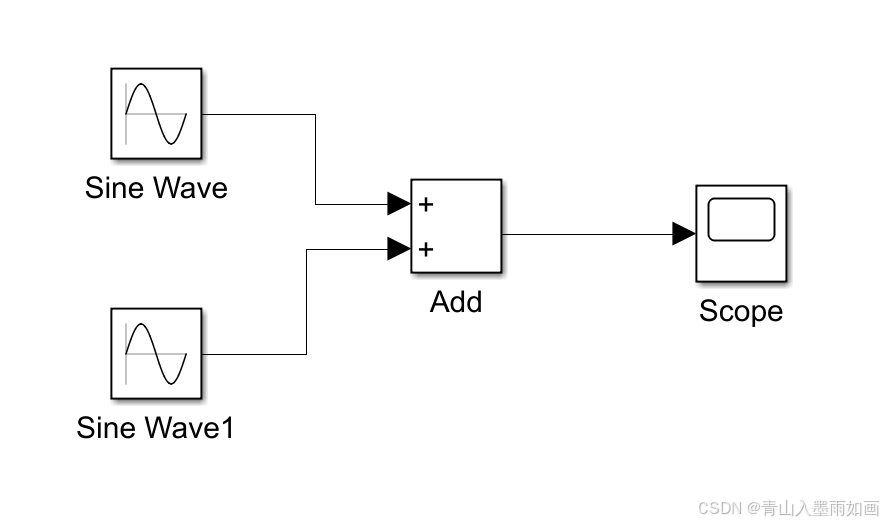
例題:兩個不同頻率的正弦波和余弦波信號,具有不同的振幅,輸出是正弦信號和余弦信號的和,并且以圖形的方式輸出系統運算的結果。
解:
1、新建一個空白模型
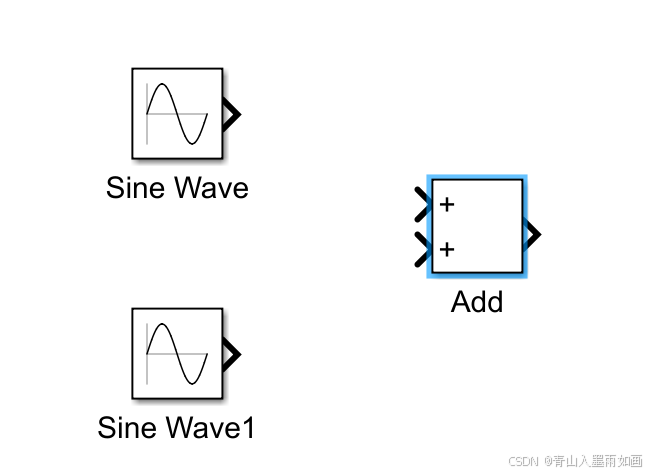
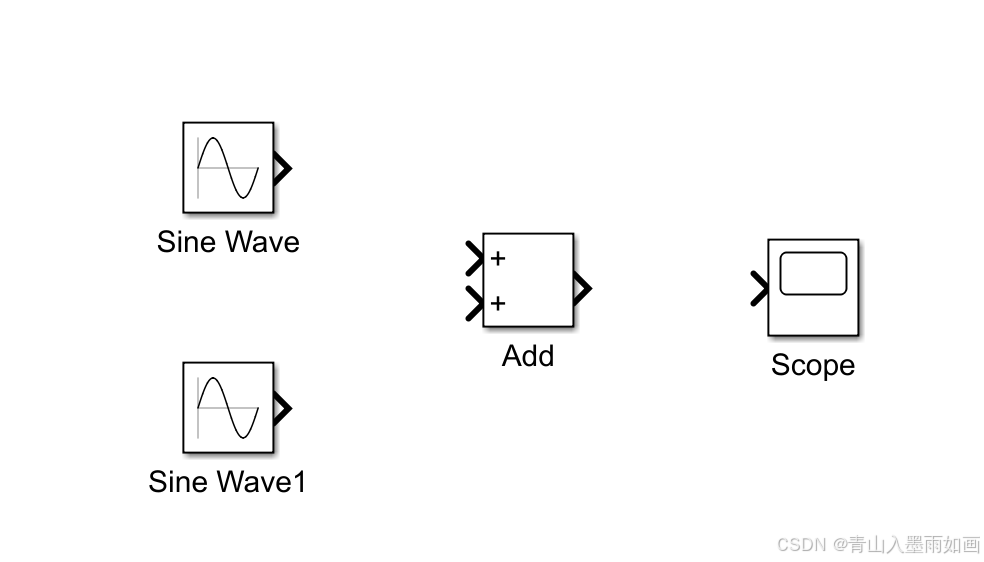
2、simulink-sources-Sine?Wave模塊
3、選擇數學運算中的加法模塊
simulink-Math Operations-Add模塊
?4、選擇輸出模塊中的scope模塊
simulink-Sinks-Scope模塊
4、參數設置
5、將各個模塊連接起來
二、模塊操作
2.1、模塊之間的連接方法
1、直接連接
2、選中Tx,按住Ctrl,點擊Rx。
2.2、模塊的復制方法
1、選中模塊鼠標右鍵,選擇復制。
2、Ctrl+C、Ctrl+V
2.3、模塊的插入
如果用戶需要在連線上插入一個信號模塊,只需要將這個模塊移動到線上就可以自動連接。
需要注意的是,這個功能僅支持單輸入和單輸出模塊,對于其他的模塊,只能是先刪除連線,再放置模塊,最后重新連線。
2.4、連線分支和連線改變
再某些情況下,一個系統模塊的輸出要同時作為其他多個模塊的輸入,這時就需要從此模塊當中引出若干連線以連接其他模塊。
對信號連線進行分支的操作方式是:
使用鼠標右鍵單擊需要分支的信號連線,拖動到目標模塊。
此外,對信號連線還有以下幾種操作:
1、使用鼠標左鍵單擊并拖動可以改變信號連線的路徑;
2、按住Shift鍵的同時在信號連線上單擊鼠標左鍵并拖動可以形成新的結點。
2.5、信號組合
在利用simulink進行仿真時,很多情況下需要將系統中某些模塊的輸出信號(標量)組合成一個向量信號,并將得到的信號作為另一個模塊的輸入。
比如在使用示波器顯示模塊scope時,scope只有一個輸入端口,若要輸入實向量信號,則scope模塊以不同的顏色顯示不同的信號,能夠完成信號組合的系統模塊是:
simulink-Signal Routing-Mux模塊
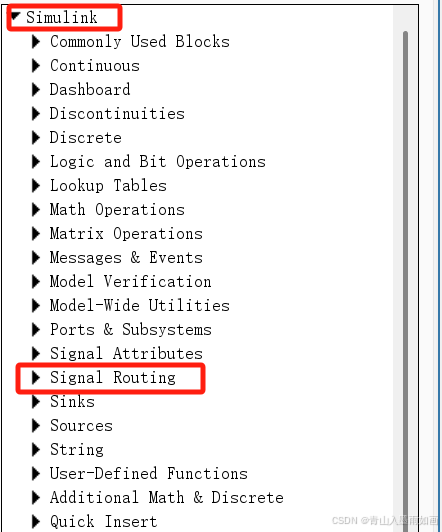
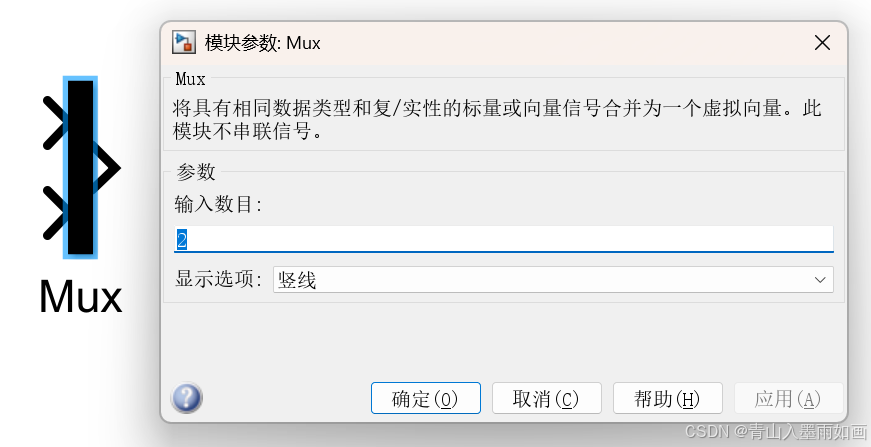
使用mux模塊可以將多個標量信號組合成一個向量信號,因此用simulink可以實現矩陣和向量之間的傳遞。
三、運行仿真
為了對動態系統進行正確的仿真,需要設置正確的系統模塊參數和系統仿真參數。
系統仿真參數的設置:
????????選中系統模型窗口中的SImulation|Configuration Parameters…菜單項,或者在窗口空白處按Ctrl+E都可以打開系統仿真參數設置對話框。
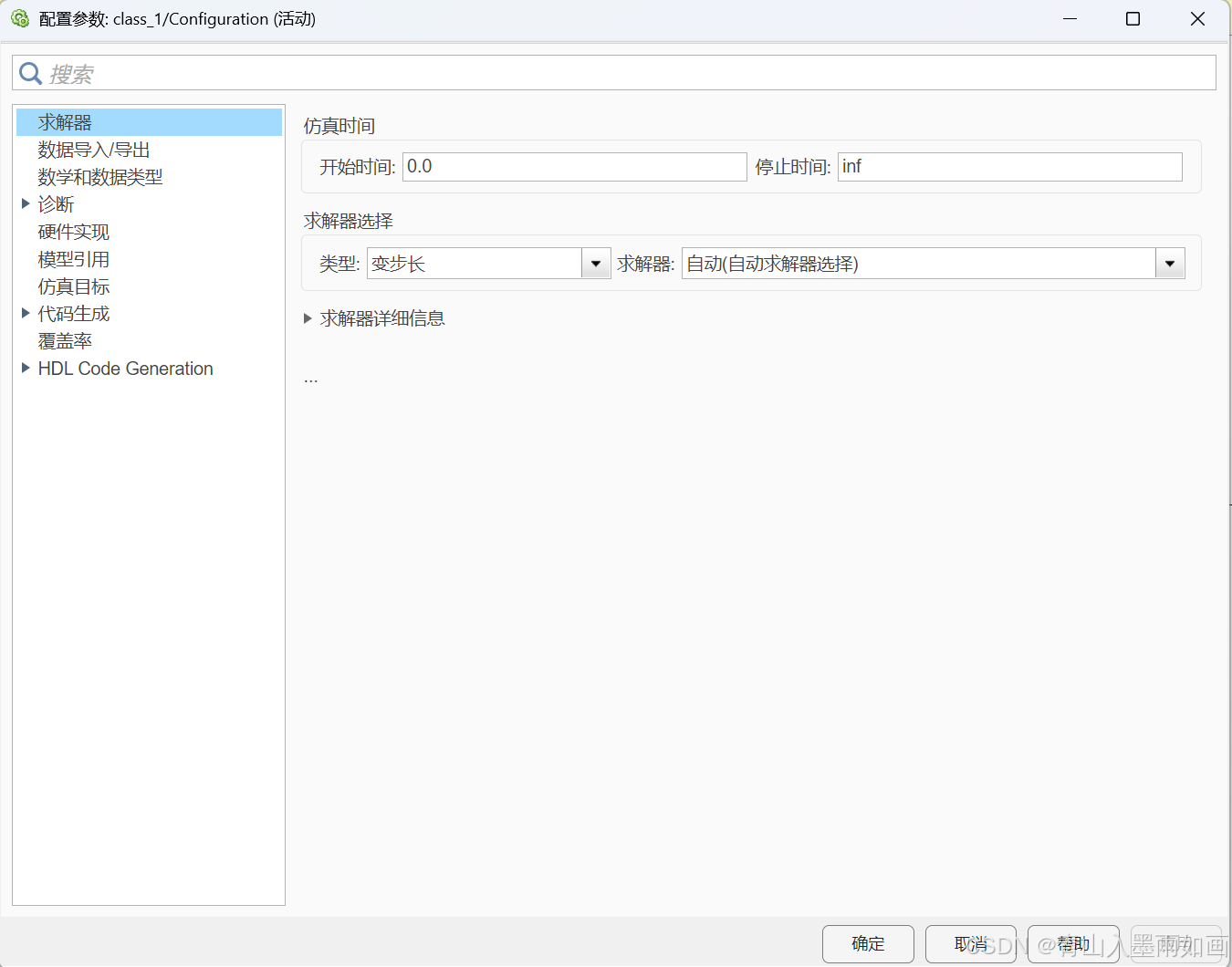
3.1、求解器
設置系統仿真時間區間。
Start Time代表仿真起始時間,Stop Time代表仿真終止時間,設置完成之后點擊OK。
3.2、仿真步長
如果發現Scope輸出的曲線不平滑,說明是在仿真過程中沒有設置合適的仿真步長,而是使用了simulink默認的仿真步長所造成了。
所以對動態系統的仿真步長需要進行合適的設置。
仿真參數的選擇對仿真結果有非常大的影響,對于簡單系統,由于系統中并不存在狀態變量,因此每次計算結果都應該是準確的,在使用simulink對簡單系統級進行仿真時,影響仿真結果輸出的因素有:仿真的起止時間、仿真步長。
對簡單系統來說,不管采用何種求解器,simulink總是在仿真過程中選用最大的仿真步長,如果仿真實踐的區間較長而最大步長值采用默認值auto,則會導致系統在仿真時使用大的步長。
matlab仿真步長的計算方法是:
(結束時間-開始時間)/50










)






:《常用內置 API 與插件》)

