??向擴散模型中引入先驗知識,實現疾病進展預測,擴散模型開始細節作業了~
論文:Enhancing Spatiotemporal Disease Progression Models via Latent Diffusion and Prior Knowledge
代碼:https://github.com/LemuelPuglisi/BrLP
0、摘要
??本文介紹了基于潛在擴散的新型時空疾病進展模型—— Brain Latent Progression(BrLP)。BrLP 旨在預測個體在三維腦 MRI 上的疾病進展。(由當前圖像獲得疾病進展后的圖像)。
??為完成這一任務而開發的現有深度生成模型主要以數據驅動為主,面臨學習疾病進展的挑戰。BrLP 通過結合疾病模型的先驗知識來增強預測的準確性,解決了這些挑戰。
??為了實現這一點,本文建議整合一個輔助模型來推斷不同腦區的體積變化。此外,本文引入了潛在平均穩定化(Latent Average Stabilization,LAS),一種新的技術來提高預測進展的時空一致性。
??BrLP 在一個大規模數據集上進行訓練和評估,該數據集包含來自 2805 名受試者的 11730 張 T1 加權腦部 MRI 圖像,這些圖像采集自三個公開的縱向阿爾茨海默病(AD)研究。
??實驗中,在橫斷面和縱向設置中,將 BrLP 生成的 MRI 掃描與受試者實際可用的隨訪 MRI 進行比較。BrLP 在體積準確性和圖像相似性方面均顯著優于現有方法,其中在與阿爾茨海默病(AD)相關的腦區體積準確性提高了 22%,與真實掃描的圖像相似性提高了 43%。
??BrLP 能夠在受試者水平生成條件化的三維掃描,并且通過整合先驗知識來提高準確性,這在疾病進展建模方面代表了一個重大進步,并為精準醫療開辟了新的途徑。
1、引言
1.1、研究意義與當前挑戰
??(1)相比于生物標志物的表征,利用豐富的、高維的影像表示疾病進展,便于可視化和精確定位復雜結構變化的模式,從而提供對疾病動態更詳細的了解;
??(2)挑戰 1: 通過基于受試者特定的元數據進行條件化,以提高個體化程度;
??(3)挑戰 2: 在有條件的情況下使用縱向掃描;
??(4)挑戰 3: 增強時空一致性,以實現空間和時間維度上的平滑進展;
??(5)挑戰 4: 管理由于使用高分辨率三維醫學圖像而導致的高內存需求;
1.2、本文貢獻
??(1)解決挑戰 1: 提出將 LDM 和 ControlNet 結合起來,根據可用的受試者數據生成個體化的腦部 MRI;
??(2)解決挑戰 2: 提出通過使用一個輔助模型來整合疾病進展的先驗知識,該模型旨在推斷不同腦區的體積變化,從而在有條件的情況下使用縱向數據;
??(3)解決挑戰 3: 提出了 LAS,這是一種用于改善預測進展的時空一致性的技術;
??(4)解決挑戰 4: 使用腦部 MRI 的潛在表示,以減少處理三維掃描的內存需求;
??本文通過訓練 BrLP 來學習不同認知狀態個體腦部的漸進性結構變化,從而評估其性能:認知正常(Cognitively Normal, CN)、輕度認知障礙(Mild Cognitive Impairment, MCI)以及阿爾茨海默病(Alzheimer’s Disease)。
??為此,本文使用了一個大規模數據集,包含來自 2805 名受試者的 11730 張 T1 加權腦部 MRI 圖像,這些圖像來自三個公開的阿爾茨海默病縱向研究。據本文作者所知,本文是首次提出一種用于腦部 MRI 的三維條件生成模型,該模型將疾病進展的先驗知識整合到圖像生成過程中。
挑戰與貢獻對應的寫法很棒的感覺~
2、方法
2.1、Background - Diffusion Models
??原文略,可參考:【Diffusion綜述】醫學圖像分析中的擴散模型(一)中 2.2 節;
2.2、Proposed Pipeline - Brain Latent Progression (BrLP)
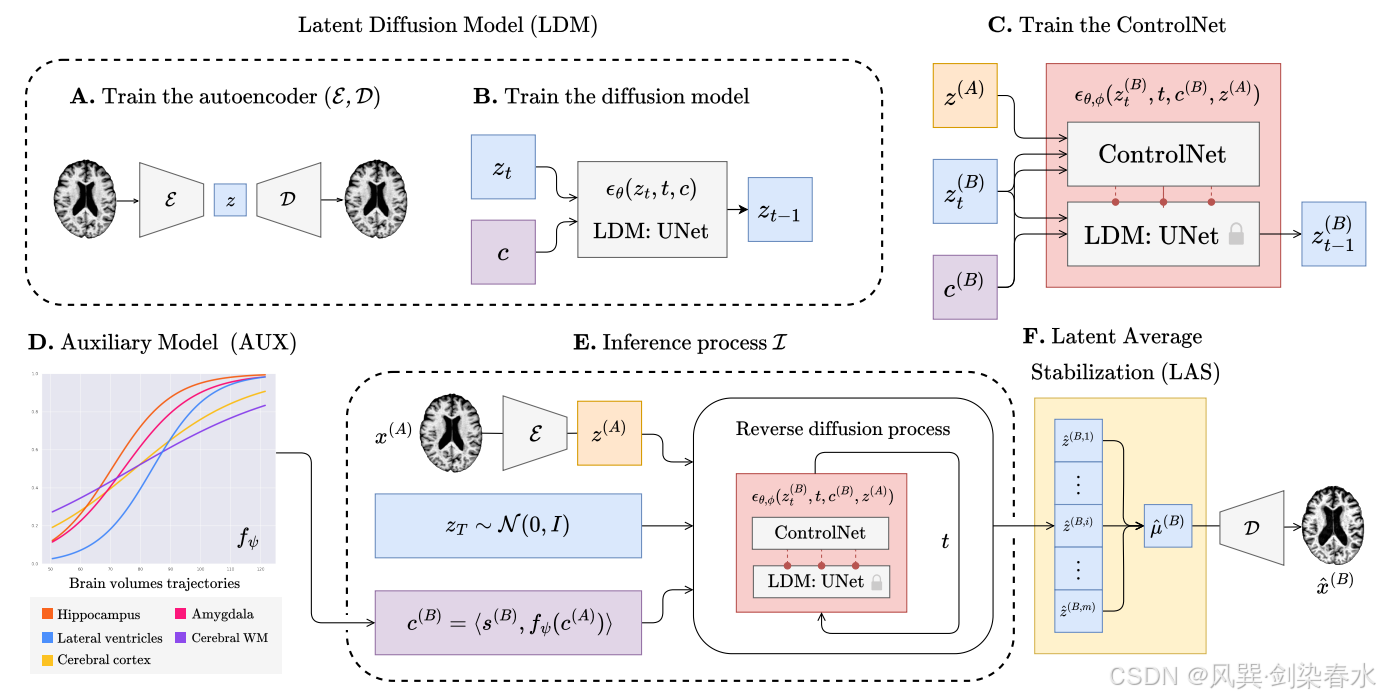
??BrLP 架構由四個關鍵組件構成:一個 LDM(潛在擴散模型)、一個 ControlNet(控制網絡)、一個輔助模型以及一個 LAS(時空一致性增強)模塊。這四個組件共同解決了引言部分提到的挑戰,其架構總體如 圖1 所示。具體來說:
??(1)LDM 旨在生成符合特定協變量的隨機三維腦部 MRI 圖像;
??(2)ControlNet 則專注于將這些 MRI 圖像細化到特定受試者的解剖結構;
??(3)輔助模型利用疾病進展的先驗知識,以提高對特定腦區體積變化預測的精確性;
??(4)LAS 模塊在推理過程中被用于增強時空一致性;
??
Figure 1 | BrLP訓練和推理過程概述:
2.2.1、LDM:學習腦 MRI 分布
??在文獻 [12] 的基礎上,本文訓練了一個潛在擴散模型(LDM),其目標是生成反映特定協變量 c = ? s , v ? c=?s,v? c=?s,v? 的三維腦部 MRI 圖像。其中, s s s 包括受試者特定的元數據(如年齡、性別和認知狀態),而 v v v 則涵蓋了與阿爾茨海默病(AD)進展相關的指標,例如與 AD 進展相關的腦區(海馬體、大腦皮層、杏仁核、大腦白質和側腦室)的體積。
??LDM 的構建是一個兩階段的過程。首先,訓練一個自編碼器 ( E , D ) (\mathcal E, \mathcal D) (E,D)(圖1中的A部分),該自編碼器旨在為數據集中的每個腦部 MRI x x x 生成一個潛在表示 z = E ( x ) z = \mathcal E(x) z=E(x)。隨后訓練一個條件 UNet(圖1中的B部分),表示為 ? θ ?_θ ?θ?,網絡參數為 θ θ θ,旨在估計從 z t z_t zt? 恢復到 z t ? 1 z_{t-1} zt?1? 所需的噪聲 ? θ ( z t , t , c ) ?_θ(z_t,t,c) ?θ?(zt?,t,c),通過最小化損失函數 L ? \mathcal L_? L?? 來訓練 ? θ ?_θ ?θ?。協變量 c c c 作為條件通過交叉注意力機制集成到網絡中。
??生成過程首先從采樣隨機高斯噪聲 z T ~ N ( 0 , I ) z_T~\mathcal N(0,I) zT?~N(0,I) 開始,然后迭代地逆向執行每個擴散步驟 z t → z t ? 1 z_t→z_{t?1} zt?→zt?1?,其中 t = T , … , 1 t=T,…,1 t=T,…,1。對最終步驟 t = 1 t=1 t=1 的輸出 z 0 z_0 z0? 進行解碼,可以得到一個符合指定協變量 c c c 的合成腦部 MRI 圖像 x ^ = D ( z 0 ) \hat x=\mathcal D(z_0) x^=D(z0?)。
2.2.2、ControlNet:基于受試者腦部 MRI 的條件
??LDM 僅通過協變量 c c c 對生成的腦部 MRI 提供有限程度的控制,并且不允許根據單個解剖結構對模型進行調節。這個模塊的目的是擴展 LDM 的能力,使其能夠包含這種額外的控制功能。為了實現這一點,本文使用了 ControlNet(圖1中的C部分),這是一個設計為與 LDM 協同工作的神經網絡。
??將 ControlNet 和 LDM 概念化為一個統一的網絡 ? θ , ? ?_{θ,?} ?θ,??,其中 θ θ θ 表示 LDM 的固定網絡參數, ? ? ? 表示 ControlNet 的可訓練網絡參數。與 LDM 一樣, ? θ , ? ?_{θ,?} ?θ,?? 仍用于預測反向擴散步驟 z t → z t ? 1 z_t→z_{t?1} zt?→zt?1? 中的噪聲 ? θ , ? ( z t , t , c , z ) ?_{θ,?}(z_t,t,c,z) ?θ,??(zt?,t,c,z),現在將 z = E ( x ) z = \mathcal E(x) z=E(x) 也作為條件,以涵蓋生成過程中目標腦 x x x 的結構。
??為了訓練 ControlNet,本文使用來自同一患者在不同年齡 A < B A < B A<B 時拍攝的腦部 MRI 對的潛在表示 z ( A ) z^{(A)} z(A) 和 z ( B ) z^{(B)} z(B)。與 z ( B ) z^{(B)} z(B) 相關的協變量 c ( B ) c^{(B)} c(B) 已知并用作目標協變量。每次訓練迭代包括:
??(1)采樣 t ~ U [ 1 , T ] t~U[1,T] t~U[1,T]
??(2)執行 t t t 步前向擴散 z ( B ) → z t ( B ) z^{(B)}→z^{(B)}_t z(B)→zt(B)?
??(3)預測噪聲 ? θ , ? ( z t ( B ) , t , c ( B ) , z ( A ) ) ?_{θ,?}(z^{(B)}_t,t,c^{(B)},z^{(A)}) ?θ,??(zt(B)?,t,c(B),z(A)) 以恢復 z t ( B ) → z t ? 1 ( B ) z^{(B)}_t→z^{(B)}_{t-1} zt(B)?→zt?1(B)?
??(4) 最小化損失 L ? \mathcal L_? L??
2.2.3、提出的輔助模型 - 利用疾病先驗知識
??AD 相關區域隨時間而縮小或擴大,且速率不同。基于深度學習的時空模型試圖以黑盒方式直接從腦部 MRI 中學習這些進展速率,這可能非常具有挑戰性。為了幫助這一過程,本文提出將有關體積變化的先驗知識直接整合到流程中。
??為此,本文利用輔助模型 f ψ f_ψ fψ?(圖1中的D部分),能夠預測與 AD 相關的區域體積隨時間的變化,并通過進展相關的協變量 v v v 將這些信息提供給 LDM。輔助模型的選擇針對兩種情況,使 BrLP 在橫斷面和縱向數據中都具有靈活性。
??對于在年齡 A A A 時有單次掃描的受試者,本文采用回歸模型來估計年齡 B B B 時的體積變化 v ^ ( B ) = f ψ ( c ( A ) ) \hat v^{(B)} = f_ψ(c^{(A)}) v^(B)=fψ?(c(A))。對于可以訪問在年齡 A 1 , . . . , A n A_1, ..., A_n A1?,...,An? 時的 n n n 次過去訪問的受試者,使用疾病進程映射 (DCM) 來預測 v ^ ( B ) = f ψ ( c ( A 1 ) , . . . , c ( A n ) ) \hat v^{(B)} = f_ψ(c^{(A_1)}, ... ,c^{(A_n)}) v^(B)=fψ?(c(A1?),...,c(An?)),該模型專門用于疾病進展。DCM 旨在根據受試者可用的體積變化歷史提供更準確的軌跡。雖然使用 DCM 作為潛在的解決方案,但任何合適的疾病進展模型都可用于 BrLP。
2.2.4、推理過程
??將 x ( A ) x^{(A)} x(A) 定義為年齡為 A A A 的受試者的輸入腦部 MRI,已知受試者特定元數據 s ( A ) s^{(A)} s(A) 和從 x ( A ) x^{(A)} x(A) 測量的進展相關體積 v ( A ) v^{(A)} v(A)。如圖1中的E部分總結,為了推斷年齡 B > A B > A B>A 時的腦部 MRI x ( B ) x^{(B)} x(B),執行 6 個步驟:
??(1)使用輔助模型預測進展相關體積 v ^ ( B ) = f ψ ( c ( A ) ) \hat v^{(B)} = f_ψ(c^{(A)}) v^(B)=fψ?(c(A));
??(2)將此信息與受試者特定的元數據 s ( B ) s^{(B)} s(B) 連接,形成目標協變量 c ( B ) = ? s ( B ) , v ^ ( B ) ? c^{(B)} =?s^{(B)},\hat v^{(B)}? c(B)=?s(B),v^(B)?;
??(3)計算潛在表示 z ( A ) = E ( x ( A ) ) z^{(A)} = \mathcal E(x^{(A)}) z(A)=E(x(A));
??(4)對隨機高斯噪聲 z T ~ N ( 0 , I ) z_T~\mathcal N(0,I) zT?~N(0,I) 進行采樣;
??(5)通過預測噪聲 ? θ , ? ( z t , t , c ( B ) , z ( A ) ) ?_{θ,?}(z_t,t,c^{(B)},z^{(A)}) ?θ,??(zt?,t,c(B),z(A)) 來運行反向擴散過程,以反轉每個擴散步驟 t = T , … , 1 t=T,…,1 t=T,…,1;
??(6)使用解碼器 D \mathcal D D 在圖像域中重建預測的腦 MRI x ( B ) = D ( z 0 ) x^{(B)} = \mathcal D(z_0) x(B)=D(z0?);
??這個推理過程被總結為一個緊湊的符號 z ^ ( B ) = I ( z T , x ( A ) , c ( A ) ) \hat z^{(B)} = \mathcal I(z_T, x^{(A)},c^{(A)}) z^(B)=I(zT?,x(A),c(A)) 和 x ^ ( B ) = D ( z ^ ( B ) ) \hat x^{(B)} = \mathcal D(\hat z^{(B)}) x^(B)=D(z^(B))。
2.2.5、通過提出的潛在平均穩定化(LAS)增強推理
??初始值 x T ~ N ( 0 , I ) x_T~\mathcal N(0,I) xT?~N(0,I) 的變化可能導致推理過程產生的結果出現輕微差異。當對連續時間步進行預測時,這些差異尤為明顯,表現為不規則的模式或進程的非平滑過渡。因此,本文引入了 LAS(圖1中的F部分),這是一種通過平均推理過程的不同結果來提高時空一致性的技術。
??特別地,LAS 基于這樣的假設:預測值 z ^ ( B ) = I ( z T , x ( A ) , c ( A ) ) \hat z^{(B)} = \mathcal I(z_T, x^{(A)},c^{(A)}) z^(B)=I(zT?,x(A),c(A)) 偏離理論平均值 μ ( B ) = E [ z ^ ( B ) ] \mu ^{(B)} = \mathbb E[\hat z^{(B)}] μ(B)=E[z^(B)]。為了估計期望值 μ ( B ) \mu ^{(B)} μ(B),本文建議重復推理過程 m m m 次,并對結果進行平均:

??與之前類似,本文對預測的掃描進行解碼 x ^ ( B ) = D ( μ ( B ) ) \hat x^{(B)} = \mathcal D(\mu ^{(B)}) x^(B)=D(μ(B))。整個推理過程(其中 m = 4 m = 4 m=4)在消費級 GPU 上每 MRI 需要 4.8 秒。
3、實驗與結果
3.1、數據
??收集了一個大型數據集,包含來自 2,805 名受試者的 11,730 張 T1 加權腦部 MR I掃描圖像,這些數據來自多個公開的縱向研究:ADNI 1/2/3/GO (1,990名受試者)、OASIS-3 (573名受試者)和 AIBL (242名受試者)。每位受試者至少有兩張 MRI 圖像,且每次掃描均在不同的訪問中獲取。
??所有數據集中均可以獲得年齡、性別和認知狀態。平均年齡為 74±7 歲,53% 的受試者為男性。根據最終訪視結果,43.8% 的受試者被歸類為正常對照組,25.7% 表現出或發展為輕度認知障礙,30.5% 表現出或發展為阿爾茨海默病。
??將數據隨機分為訓練集(80%)、驗證集(5%)和測試集(15%),且各組之間沒有重疊的受試者。驗證集用于訓練過程中的提前停止。每張腦部 MRI 圖像均經過預處理,包括:N4 偏場校正、顱骨剝離、到 MNI 空間的仿射配準、強度歸一化以及重采樣至 1.5mm3。用于評估進展的相關協變量體積是使用 SynthSeg 2.0 計算得出,并以總腦體積的百分比表示,以考慮個體差異。
3.2、評價指標
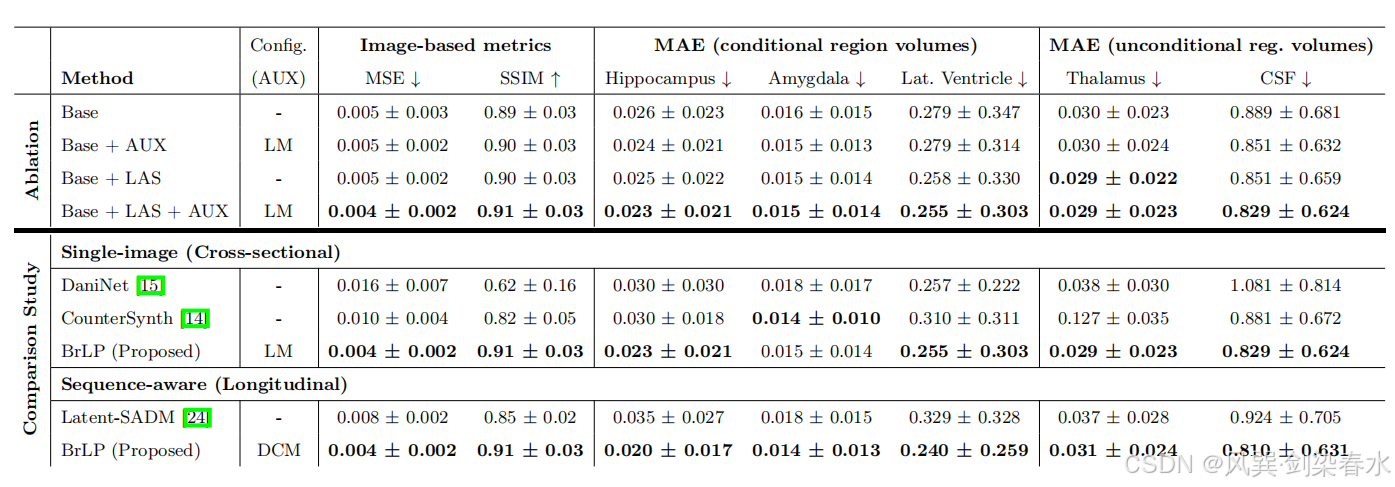
??均方誤差(MSE)和結構相似性指數(SSIM)用于評估掃描之間的圖像相似性;
??與 AD 相關的區域(海馬體、杏仁核、側腦室、腦脊液和丘腦)的體積指標評估模型在追蹤疾病進展方面的準確性;
3.3、消融實驗與對比實驗
??
Table 1 | 消融研究結果以及與基線方法的比較:預測體積中的 MAE(± SD)表示為總腦體積的百分比;
3.4、示例展示
??
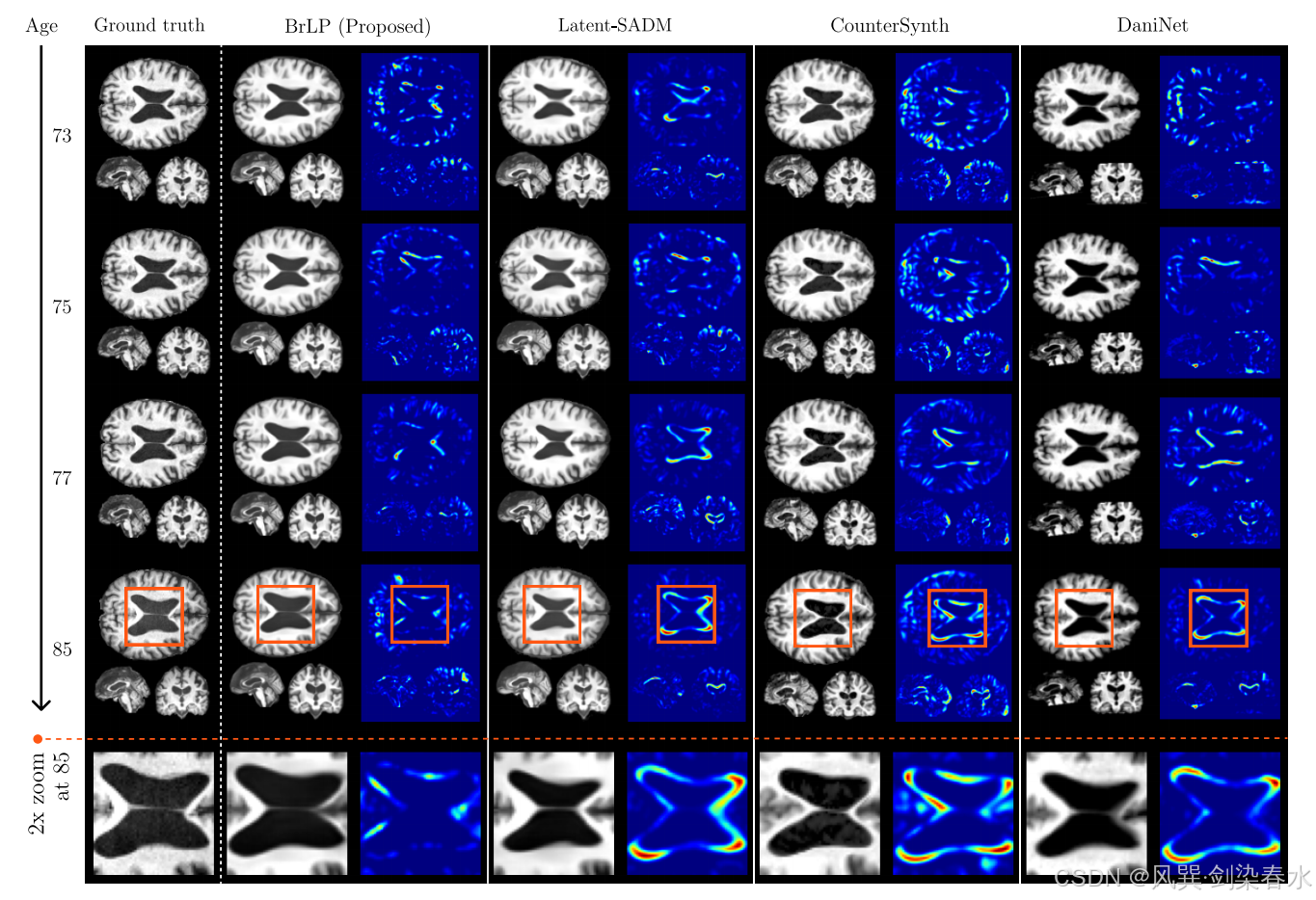
Figure 2 | 將 70 歲 MCI 受試者 15 年的真實進展與 BrLP 和基線方法的預測進行比較:每種方法顯示預測的 MRI(左)及其與受試者真實腦 MRI 的偏差(右);
??疾病進展還是太細節的變化了,怎樣提升擴散模型的細節處理呢(我又被拒稿了,難過/(ㄒoㄒ)/~~)
![[ linux-系統 ] 常見指令2](http://pic.xiahunao.cn/[ linux-系統 ] 常見指令2)














)



)