00?DH模型的核心概念
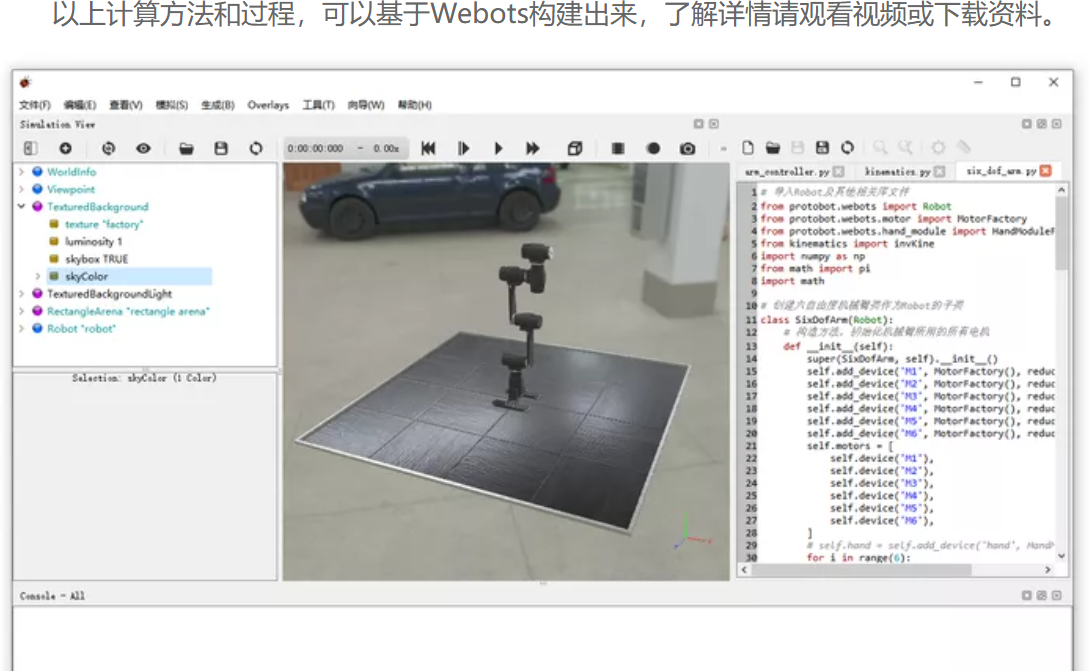
【全程干貨【六軸機械臂正逆解計算及仿真示例】】
如何實現機械臂的逆解計算-機器譜-robotway
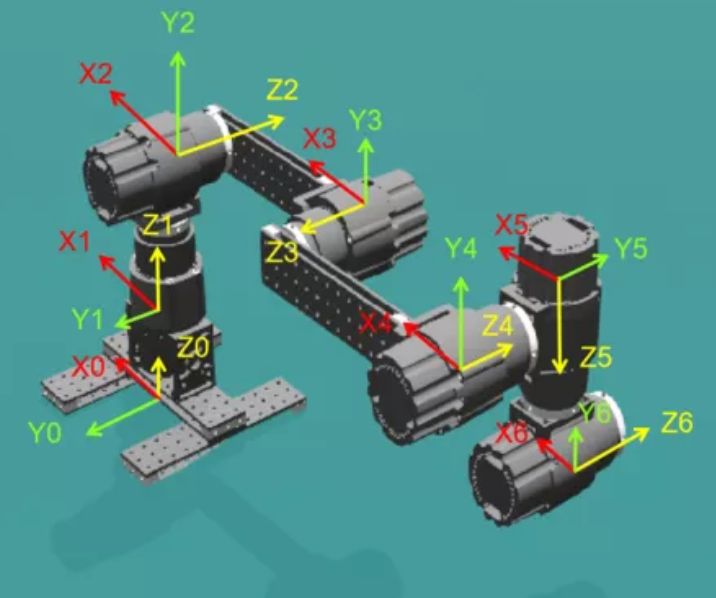
DH模型是機器人運動學建模的基礎方法,通過??四個參數??描述相鄰關節坐標系之間的變換關系。其核心思想是將復雜的空間位姿轉換分解為繞軸旋轉和平移的組合,簡化運動學計算
???四個關鍵參數??
| 參數符號 | 物理意義 | 關聯軸 | 變量類型 |
|---|---|---|---|
| ??θ?i? | 繞Zi-1軸Xi-1與Xi之間的旋轉角度 | 關節轉動軸(Z_{i}) | 旋轉關節的變量 |
| ??d?i? | 沿Zi-1軸的Xi-1與Xi之間平移距離(連桿偏移) | 關節移動軸(Z_{i}) | 平移關節的變量 |
| ??a?i? | 沿Xi軸Zi-1與Zi之間的連桿長度 | 公垂線方向(X_{i}) | 固定幾何參數 |
| ??α?i? | 繞Xi軸Zi-1與Zi之間的旋轉角度(連桿扭轉角) | 兩Z軸夾角(X_{i}) | 固定幾何參數 |
?坐標軸的正方向為正
?01 正運動學
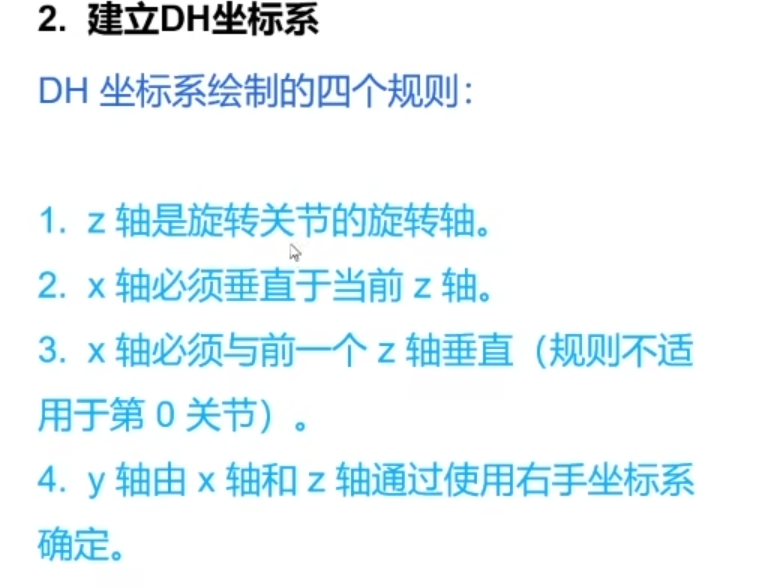
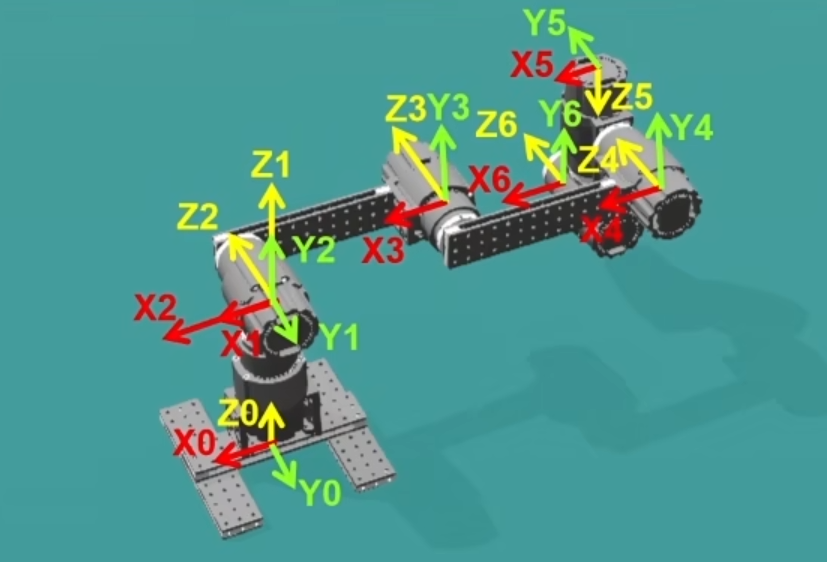
3.確定DH參數(di、θi、ai、αi)
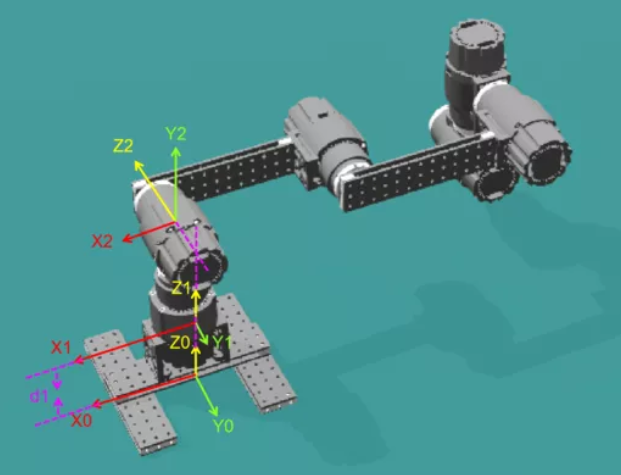
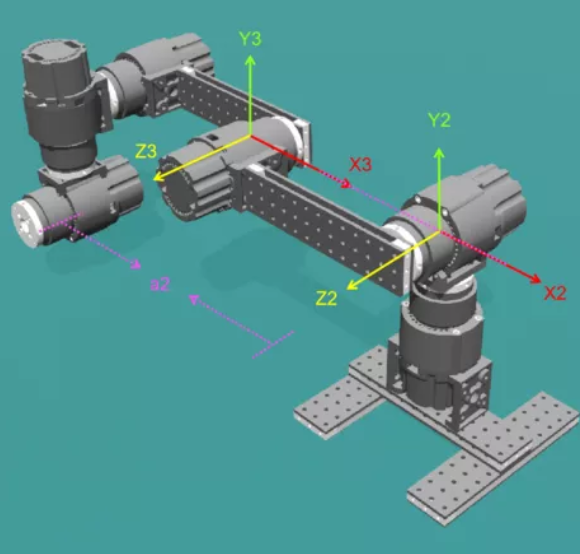
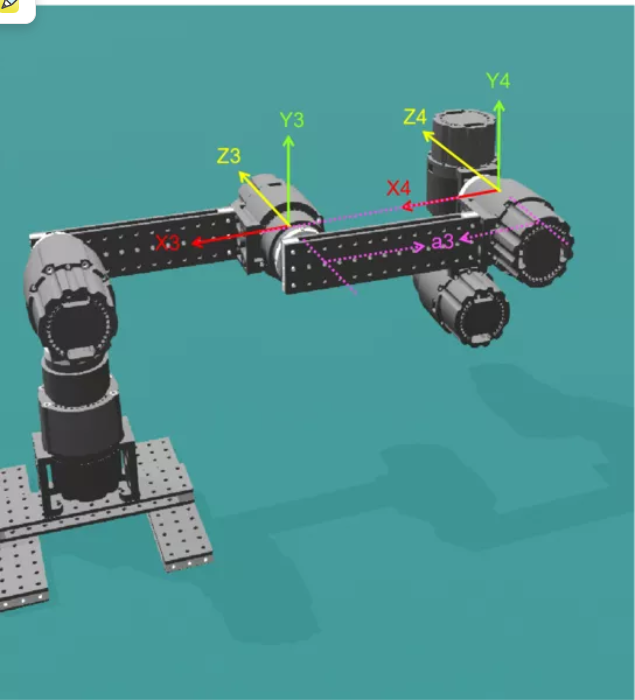
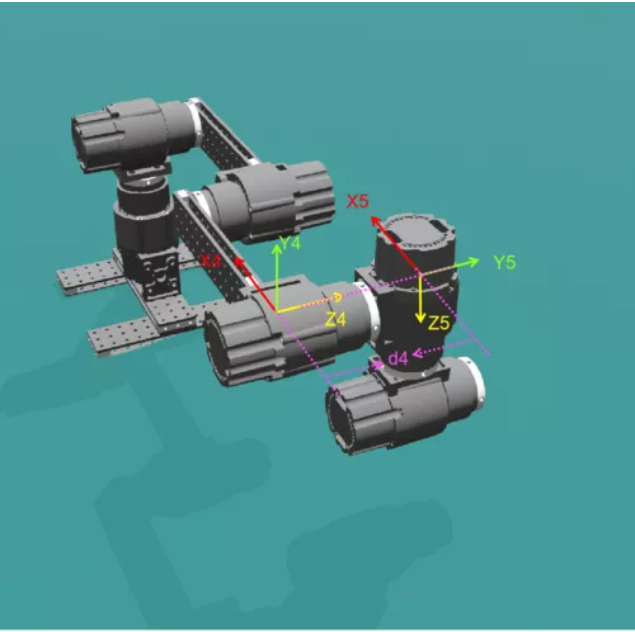
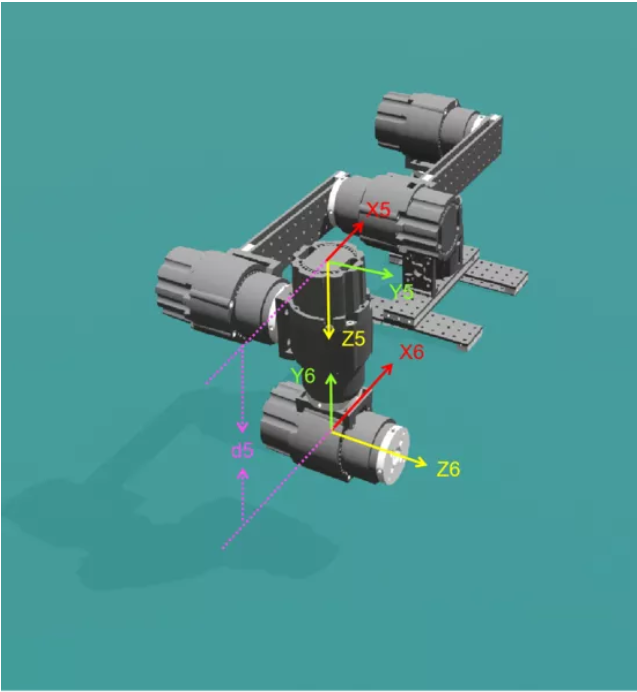
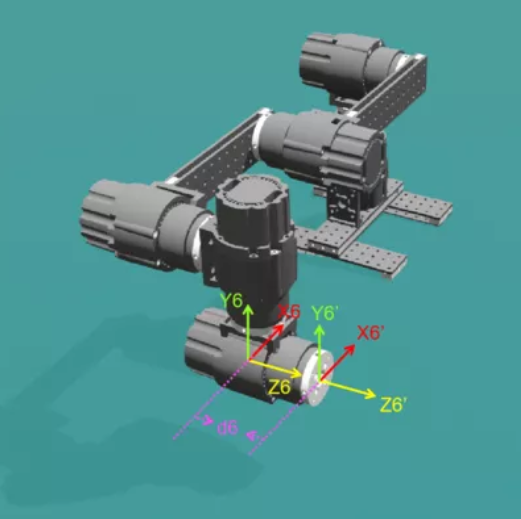
最后一個參數是最后一個軸到機械末端
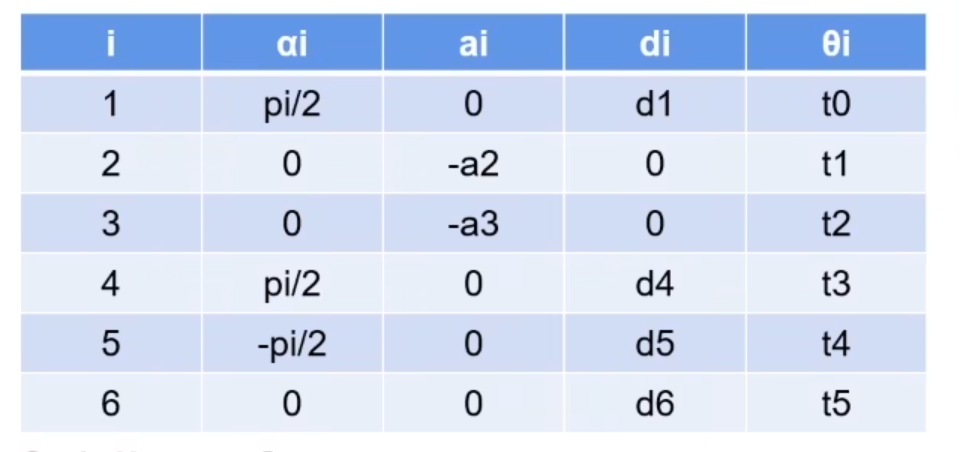
4.計算正向運動學
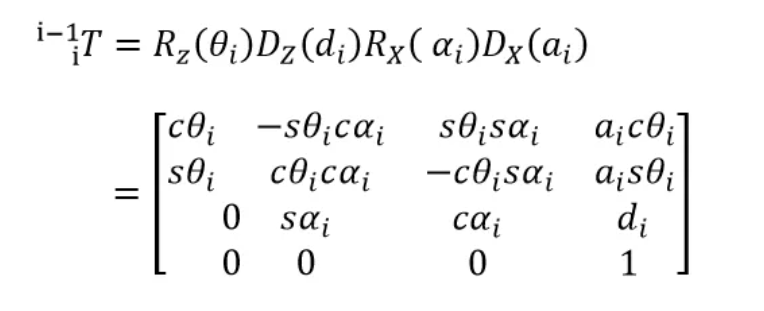
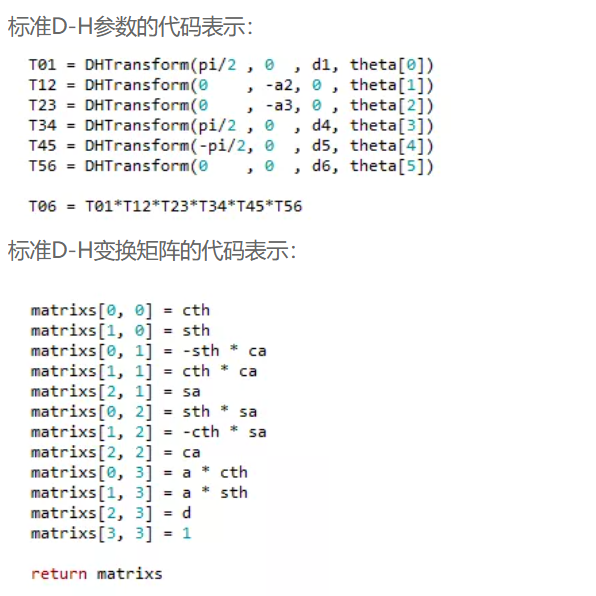
將上表中的標準D-H參數代入相鄰坐標系的變換矩陣中,這個矩陣是標準D-H參數的變換矩陣,如果是改進型的D-H參數,則矩陣會有不同
5.仿真與實踐
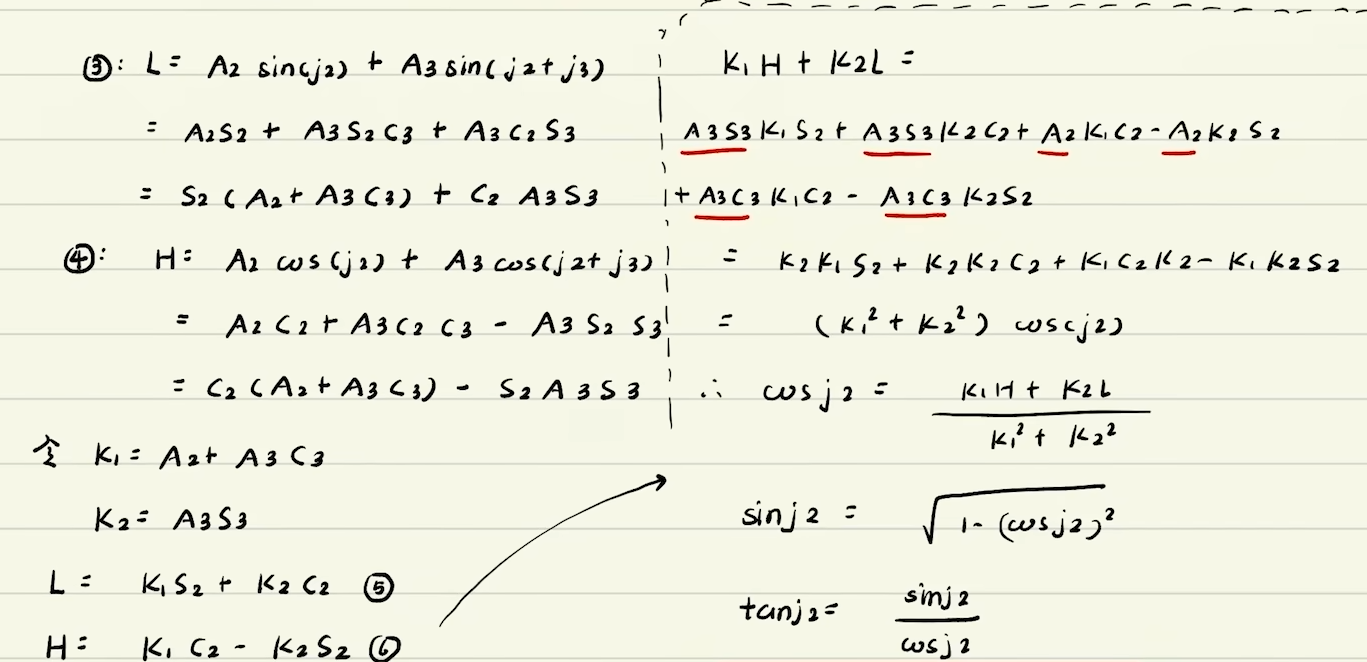
02 逆運動學
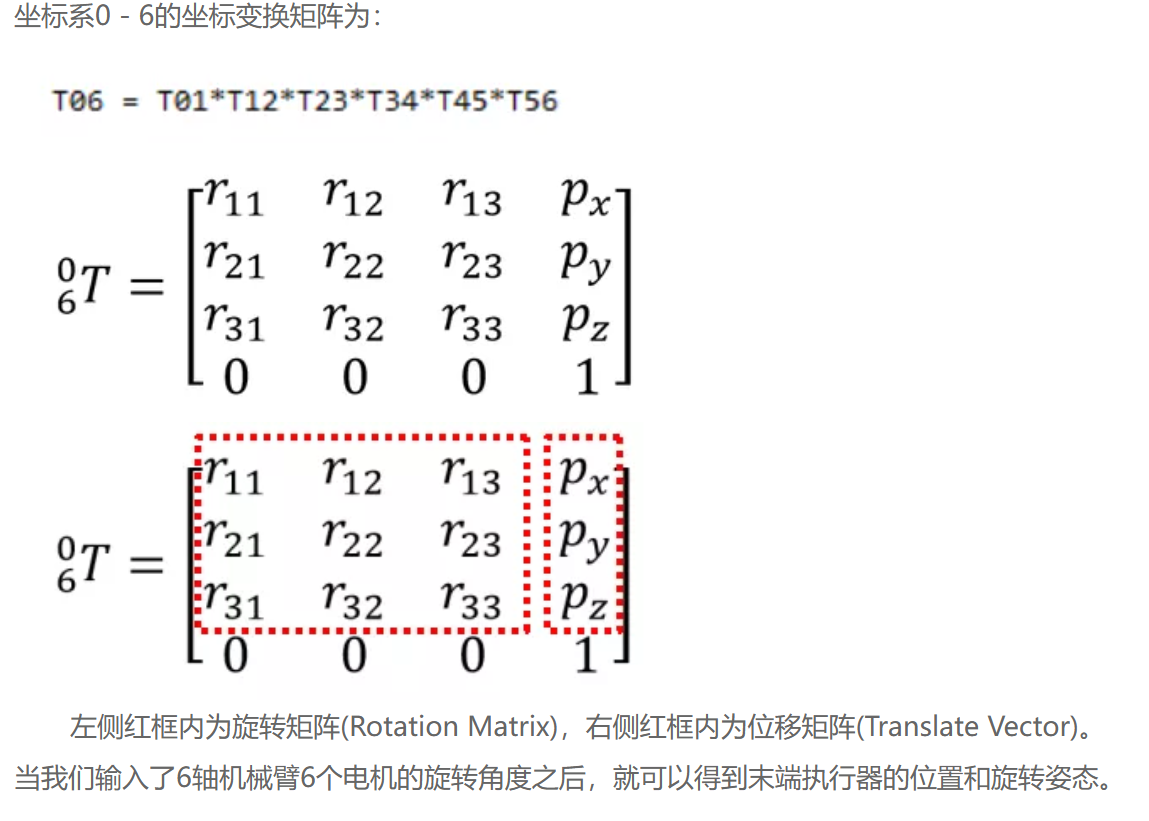
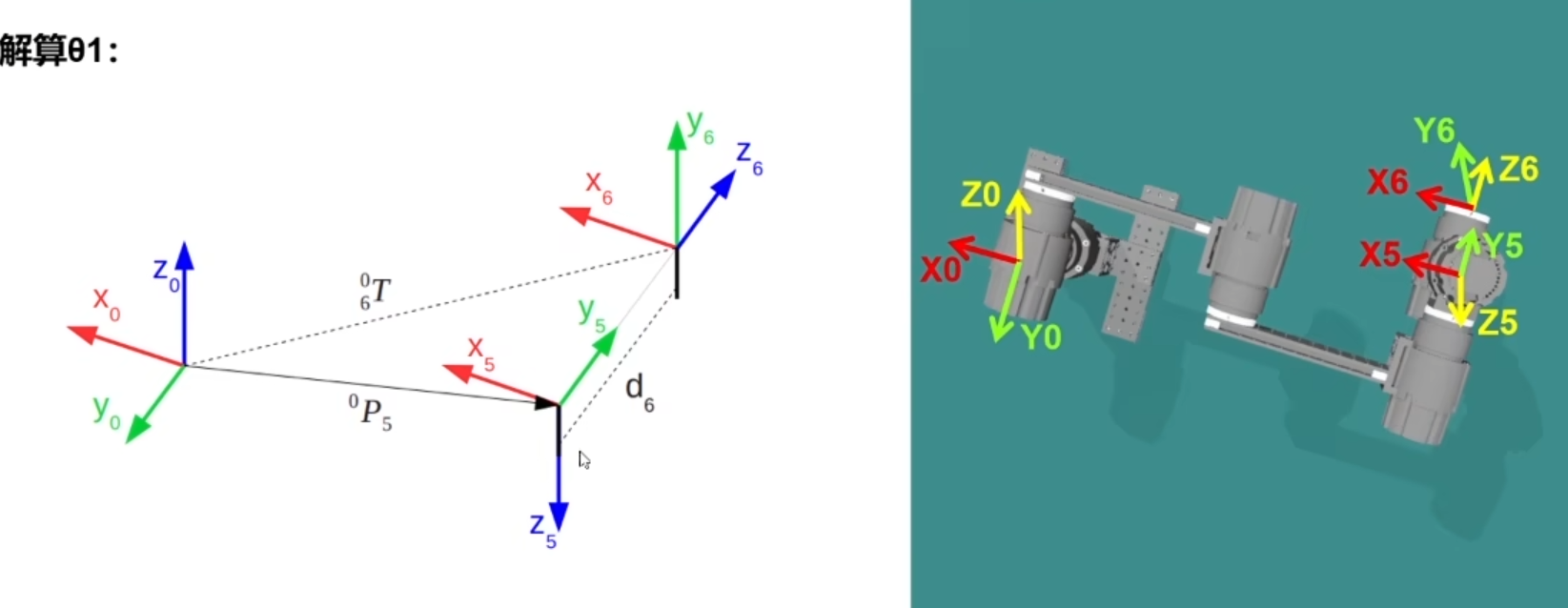
逆運動學則是根據已知的末端執行器的位置和姿態,計算機器人各個關節變量,也被稱為機器人運動學求解
機械臂末端執行器的位姿 —–> 關節變量 ?= 逆向運動學
逆運動學的求解方法有兩類:
(1)解析解法
① 代數法
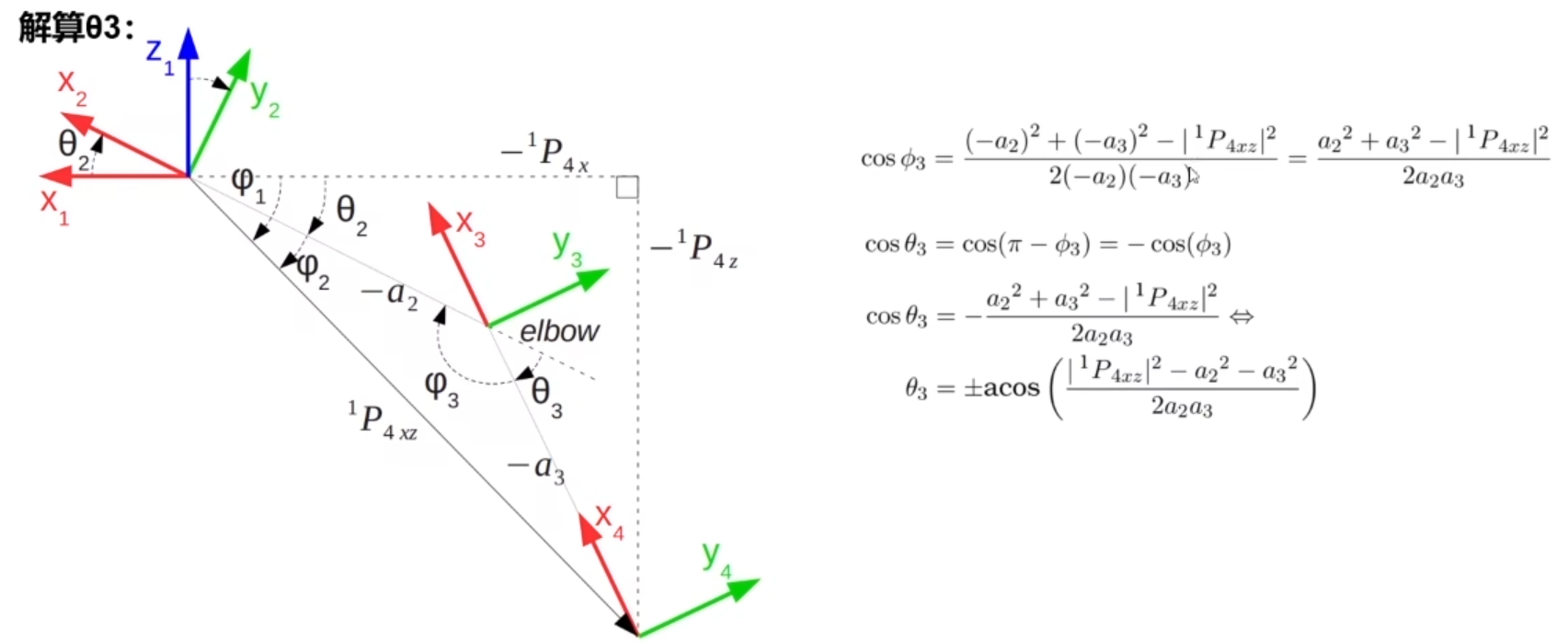
② 幾何法
(2)數值解法
① 迭代法
② 優化法
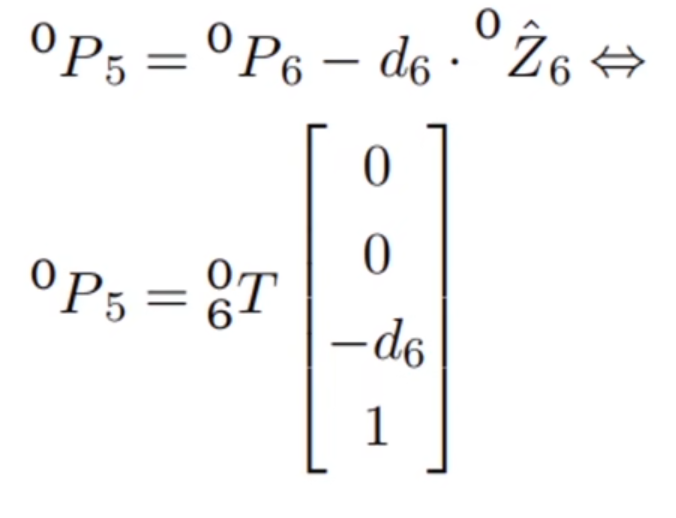
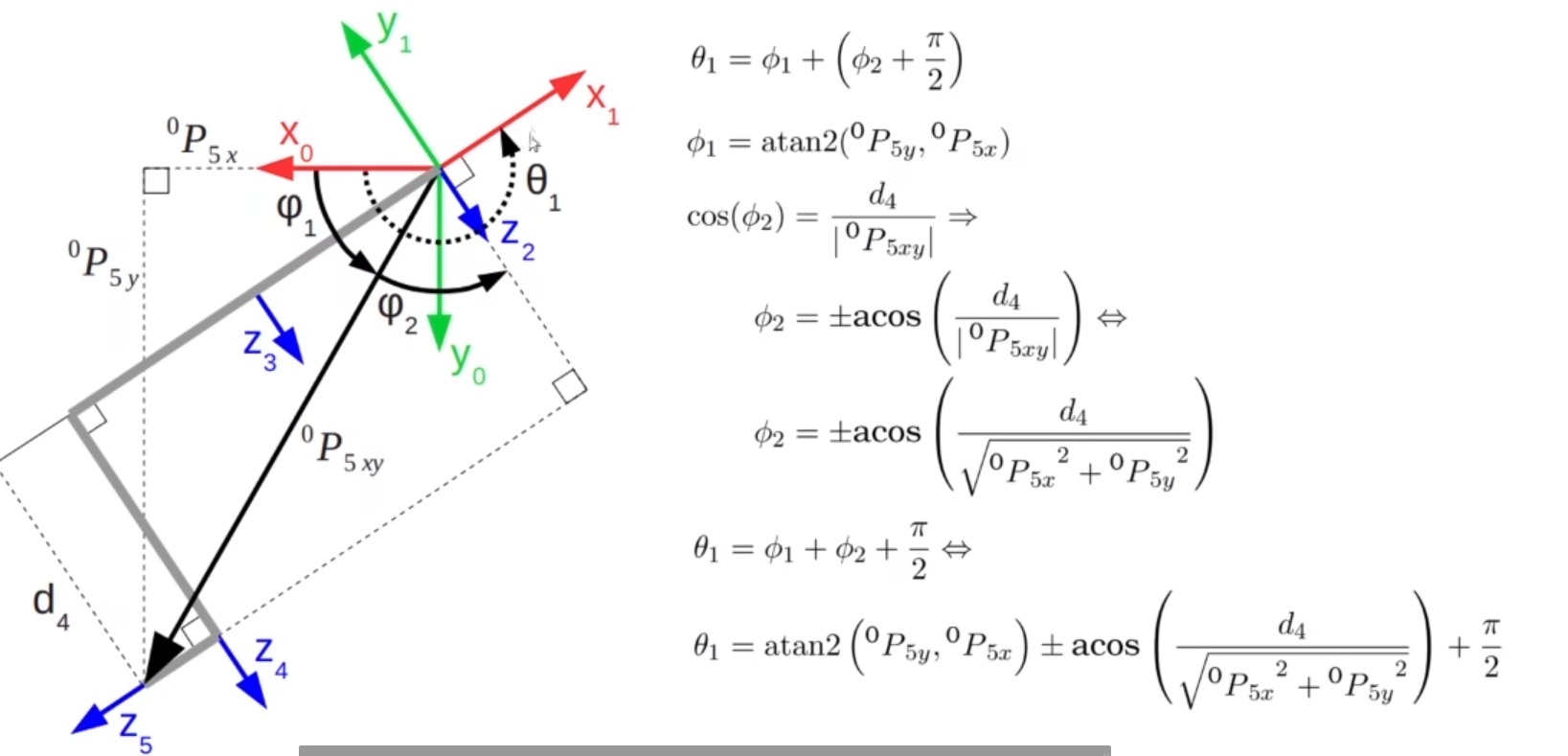
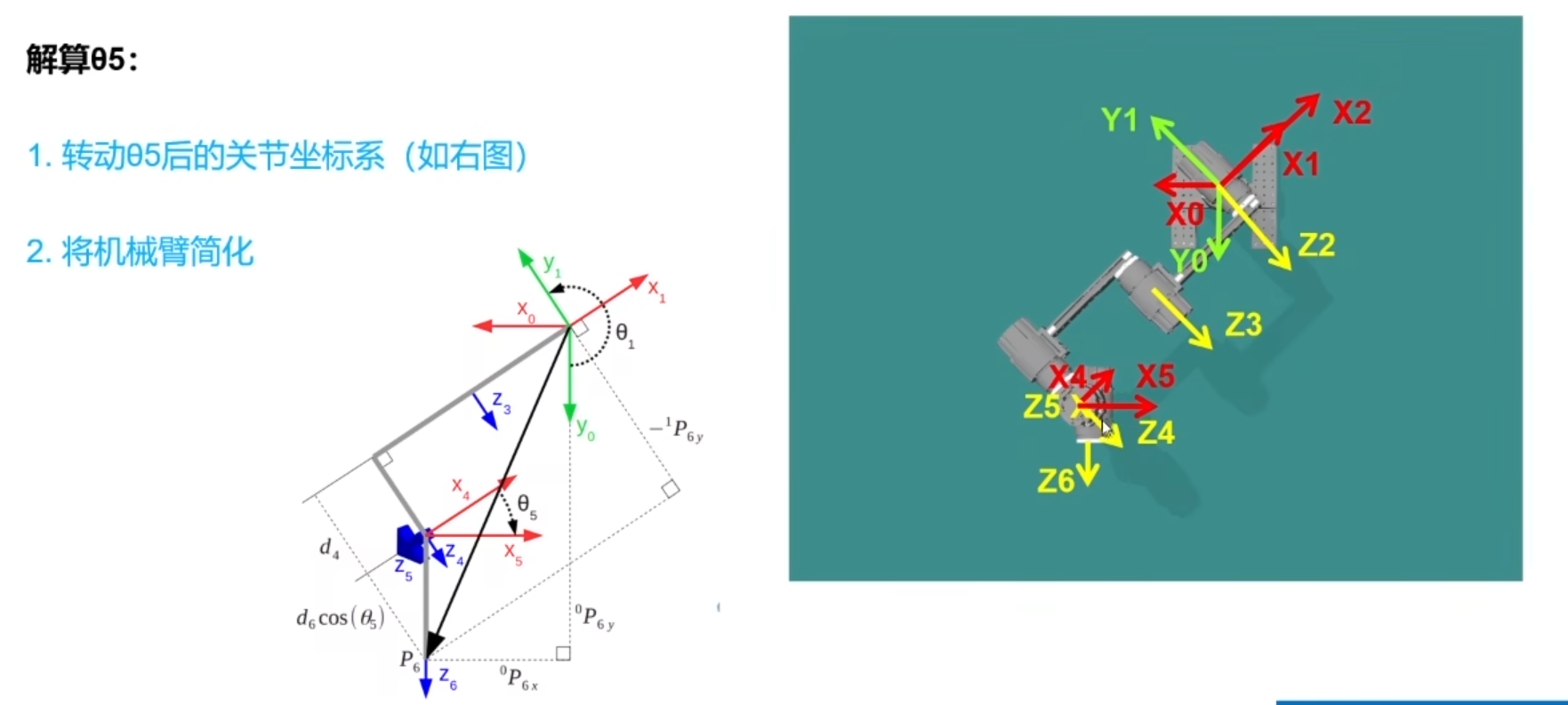
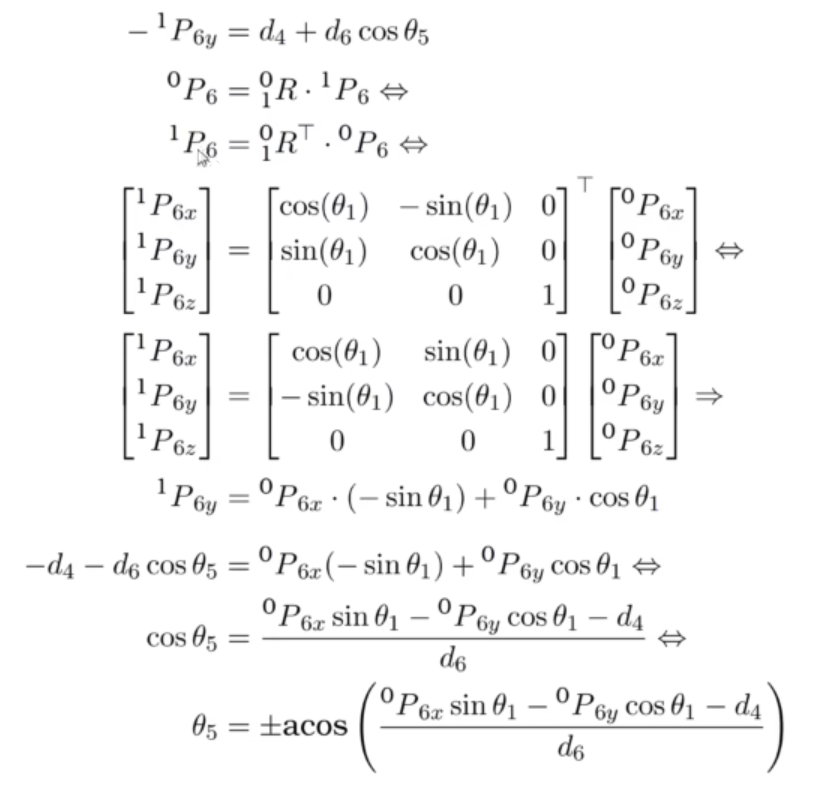
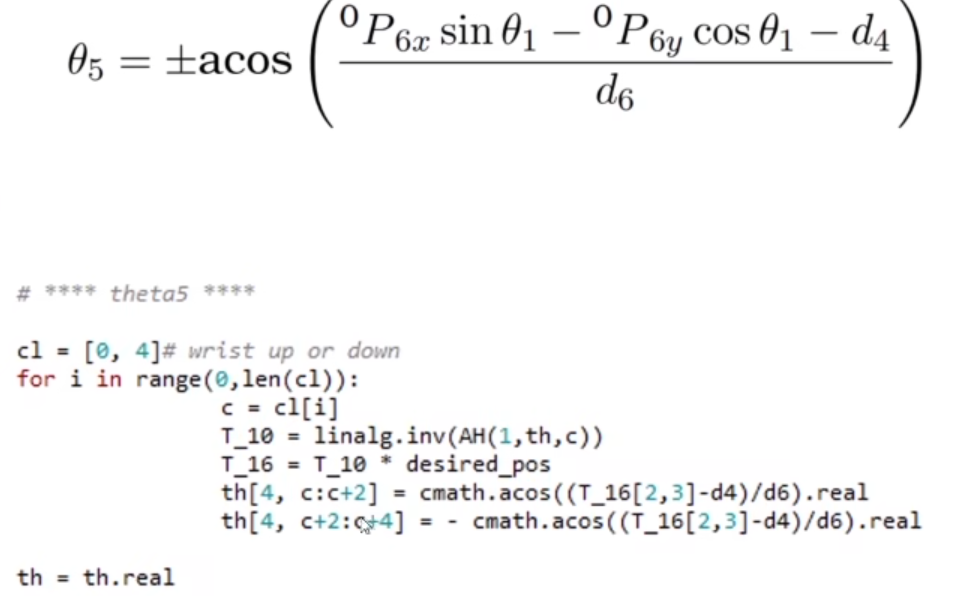
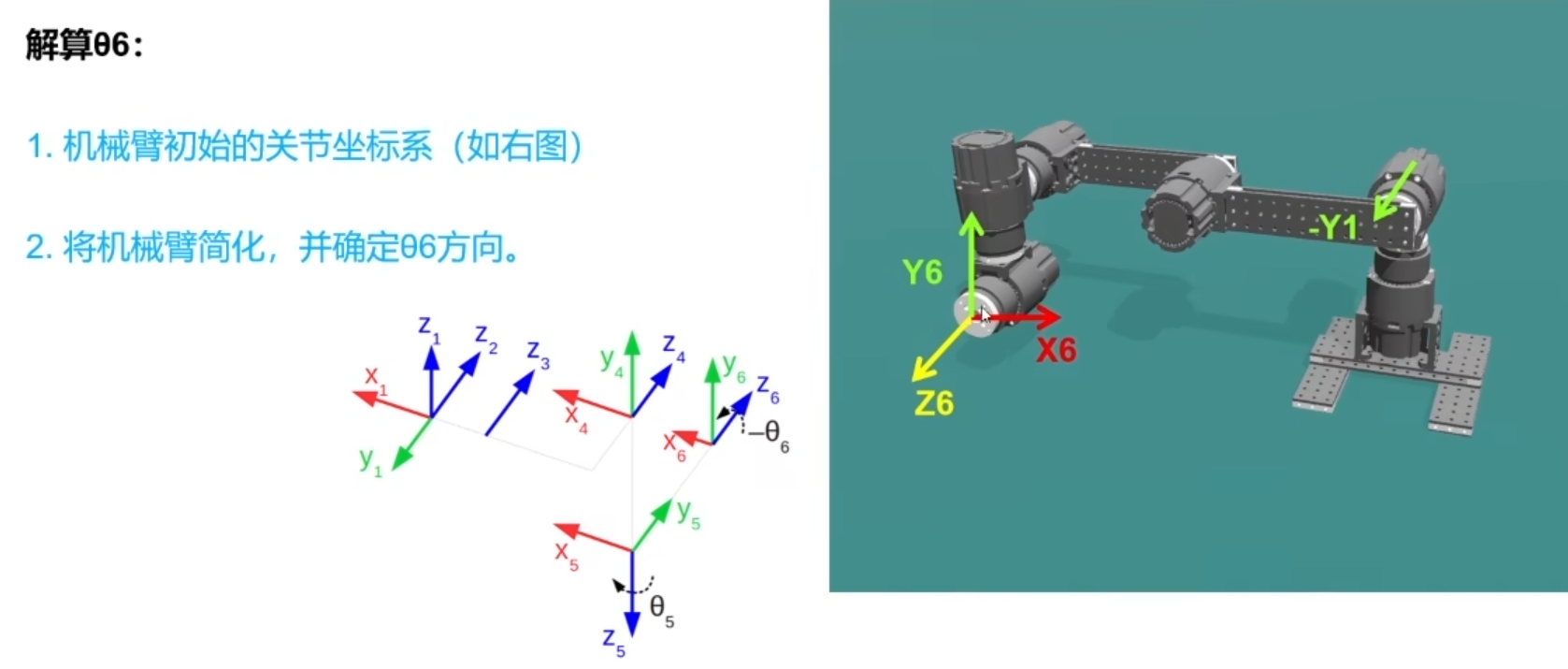
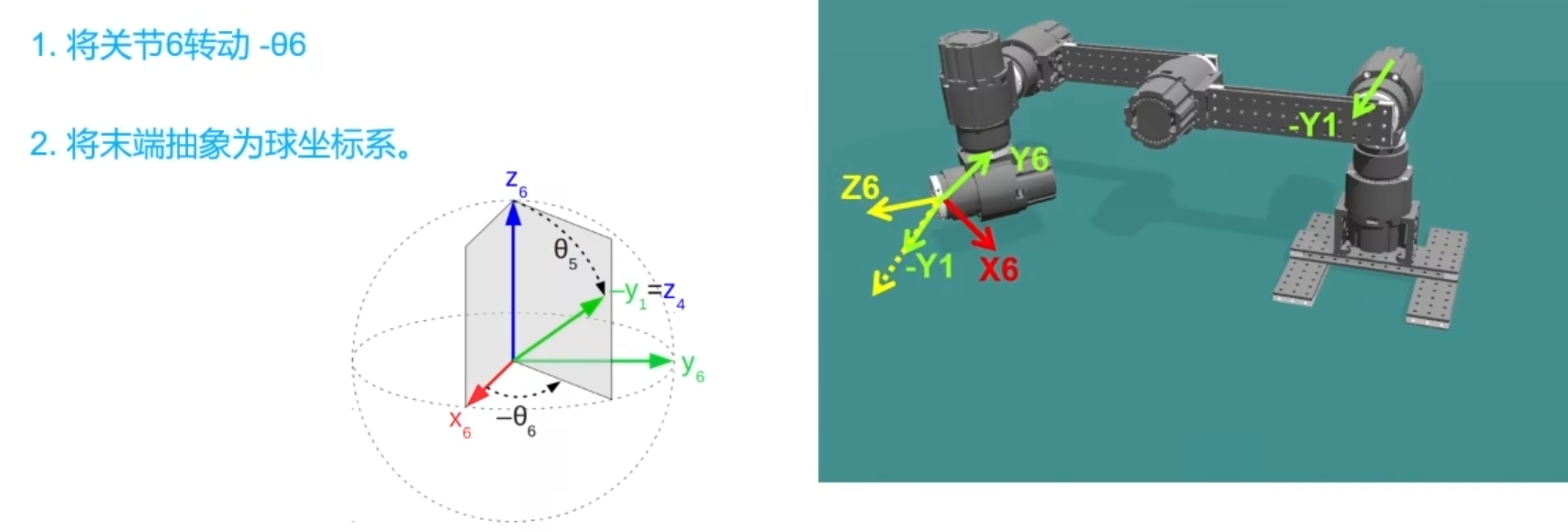
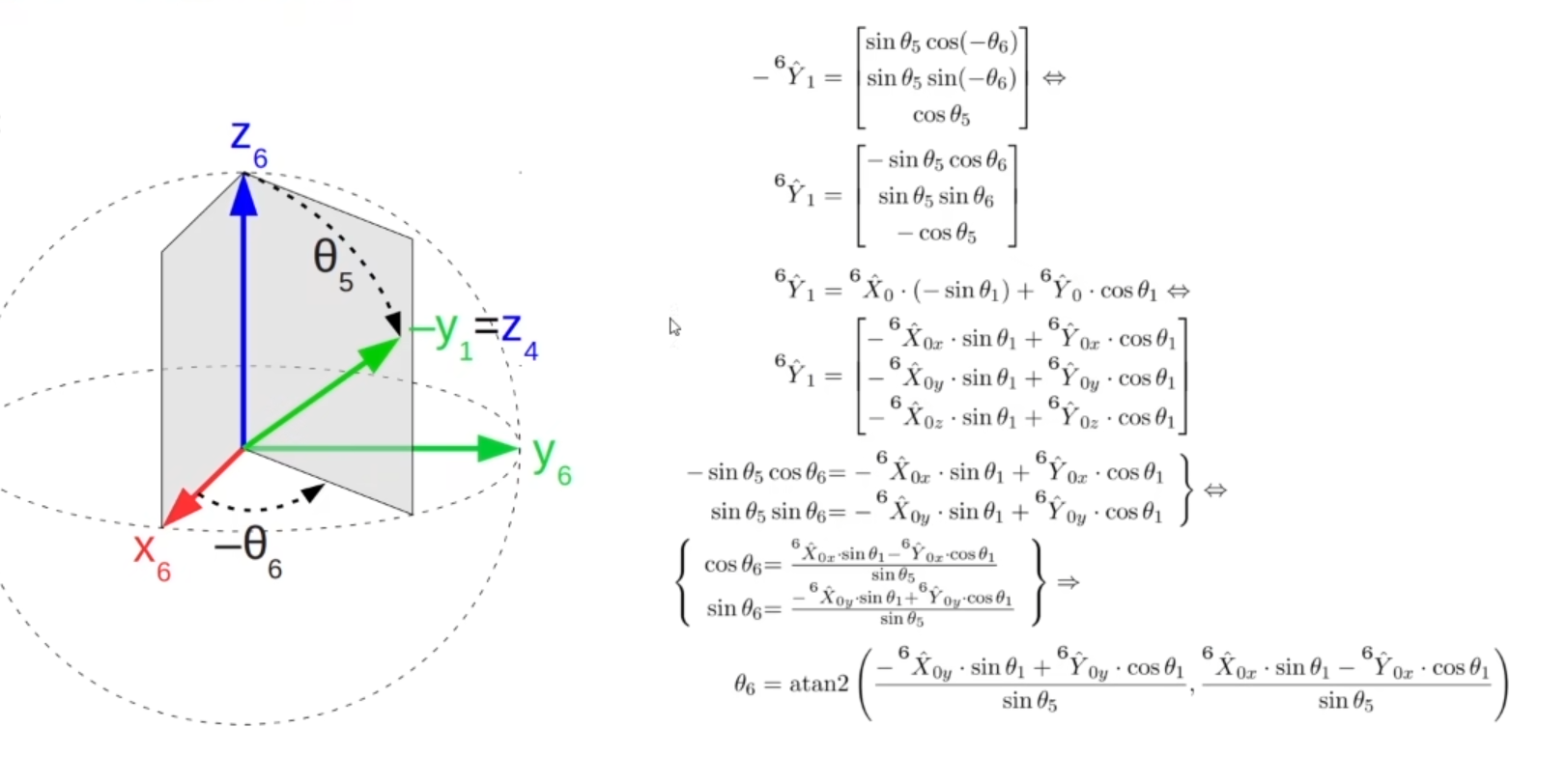
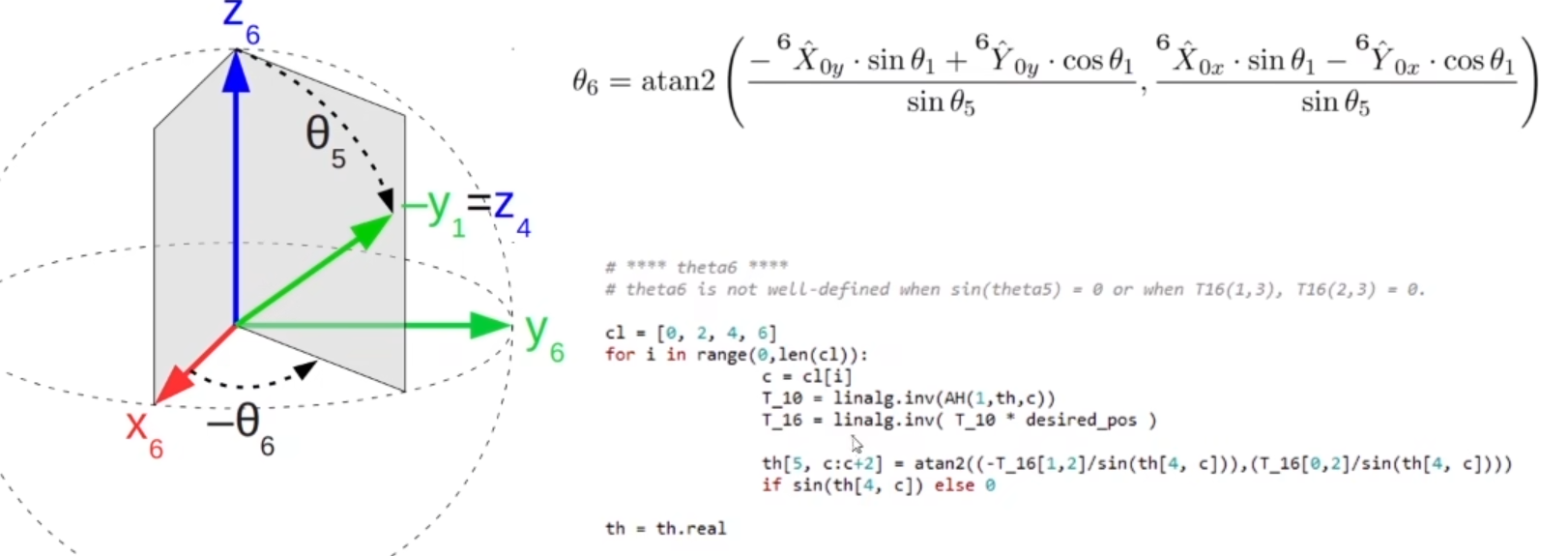
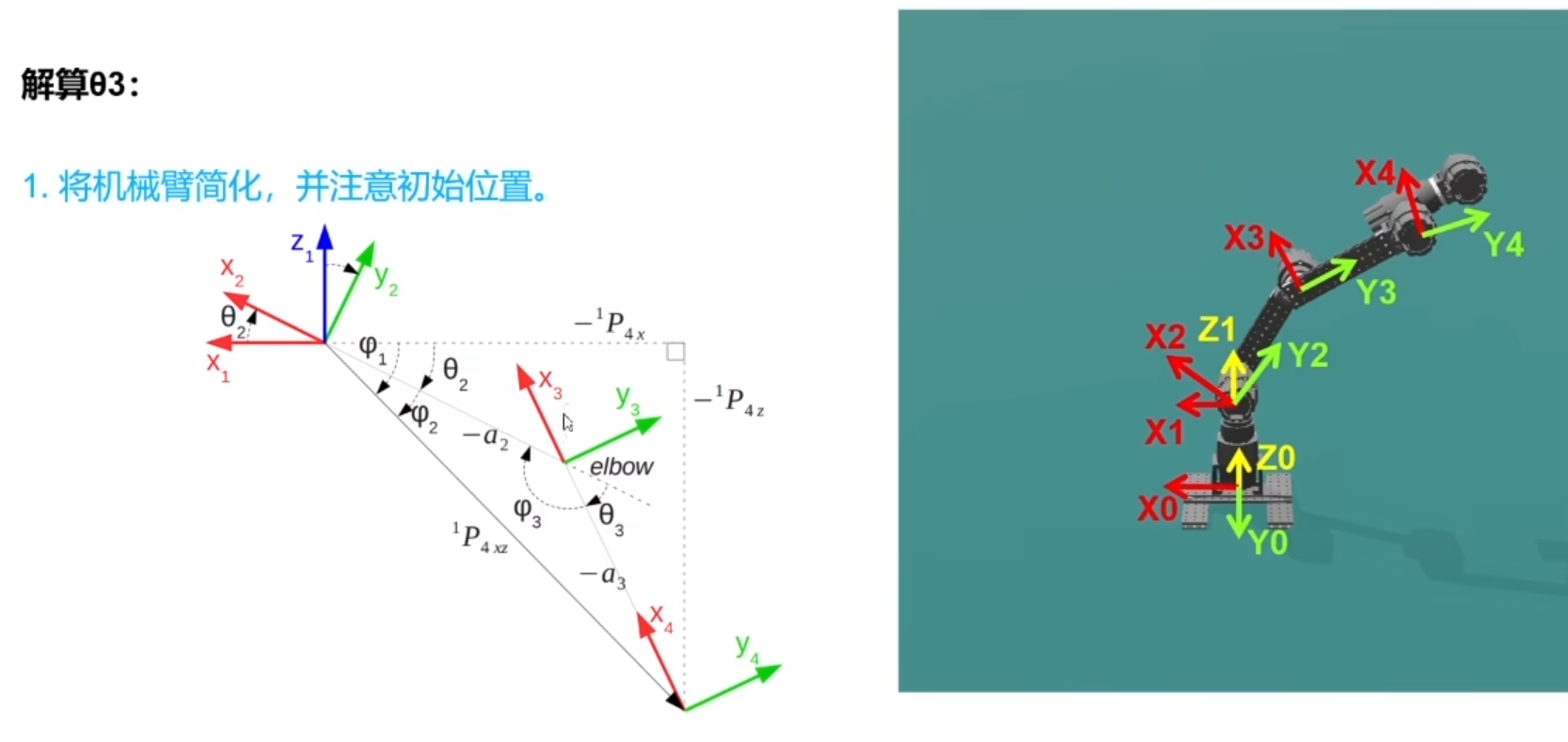
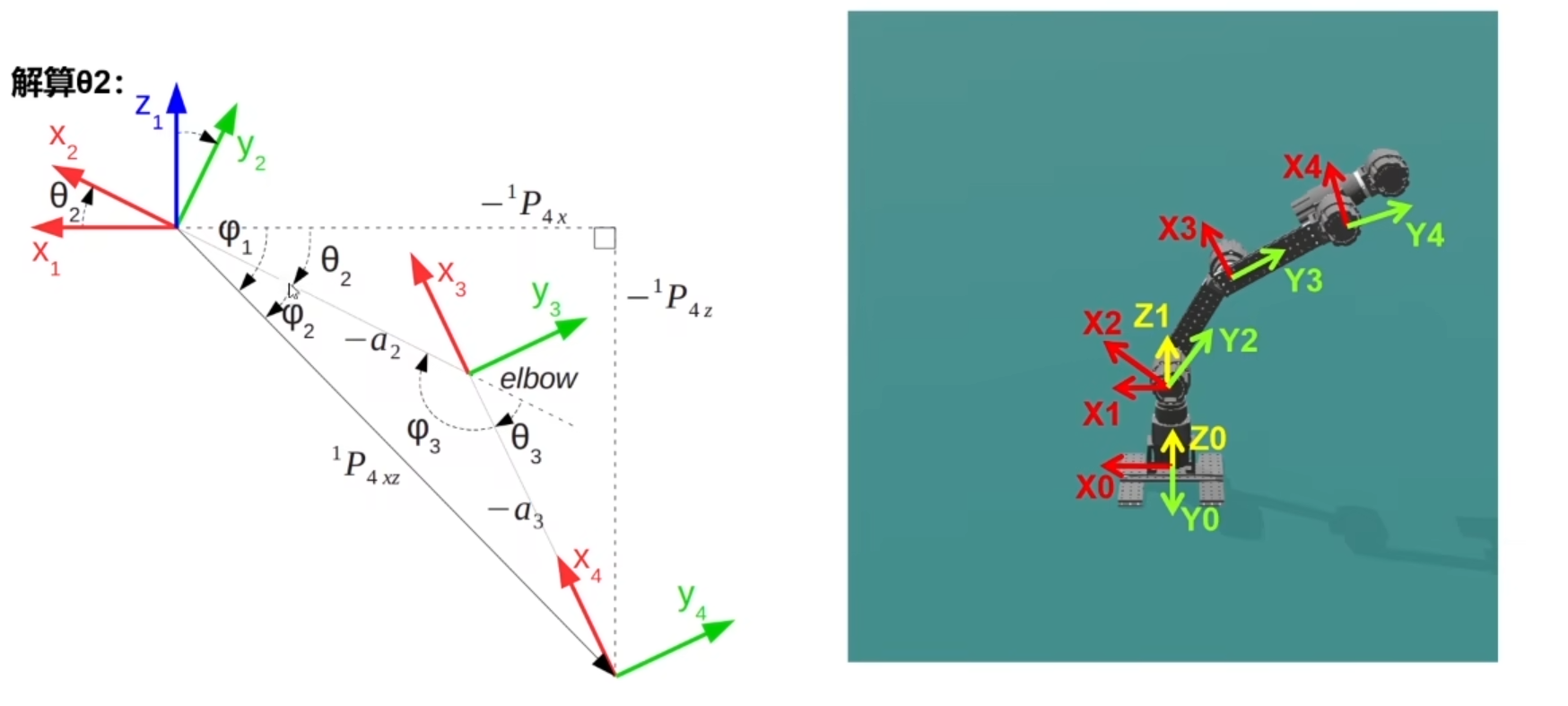
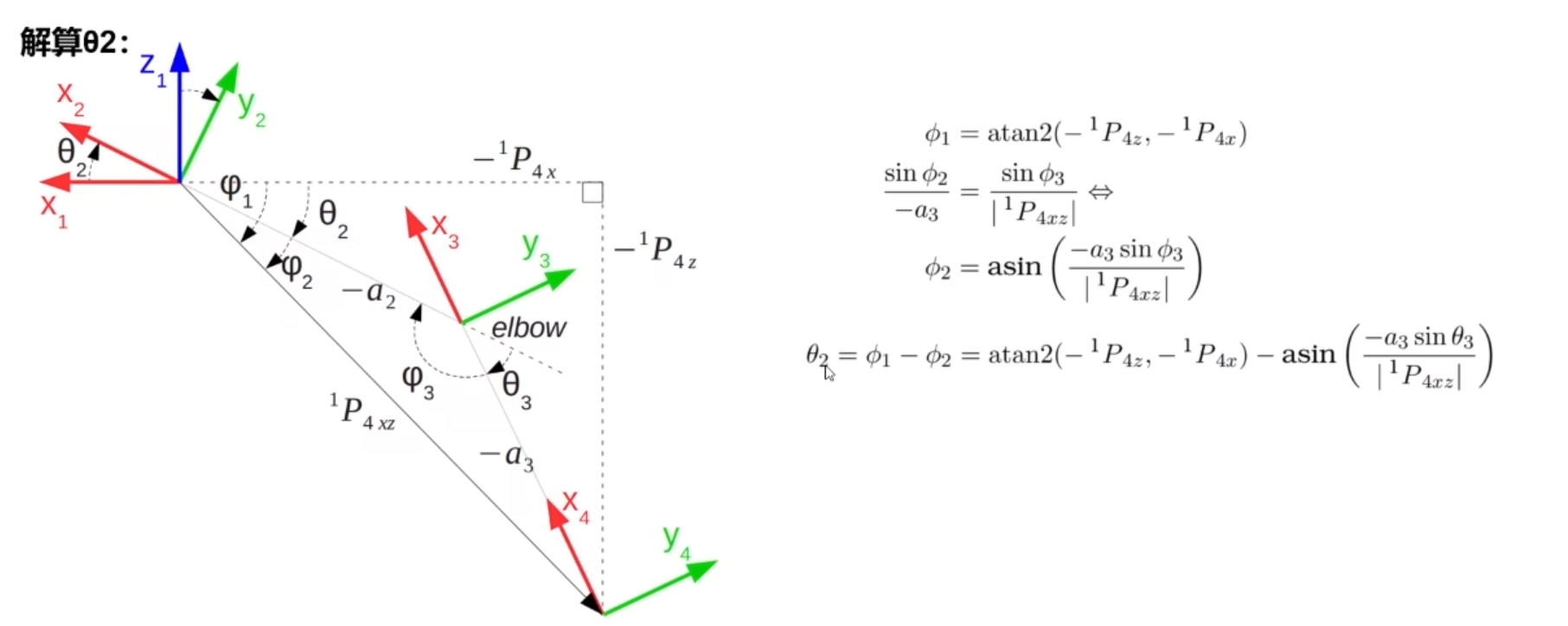
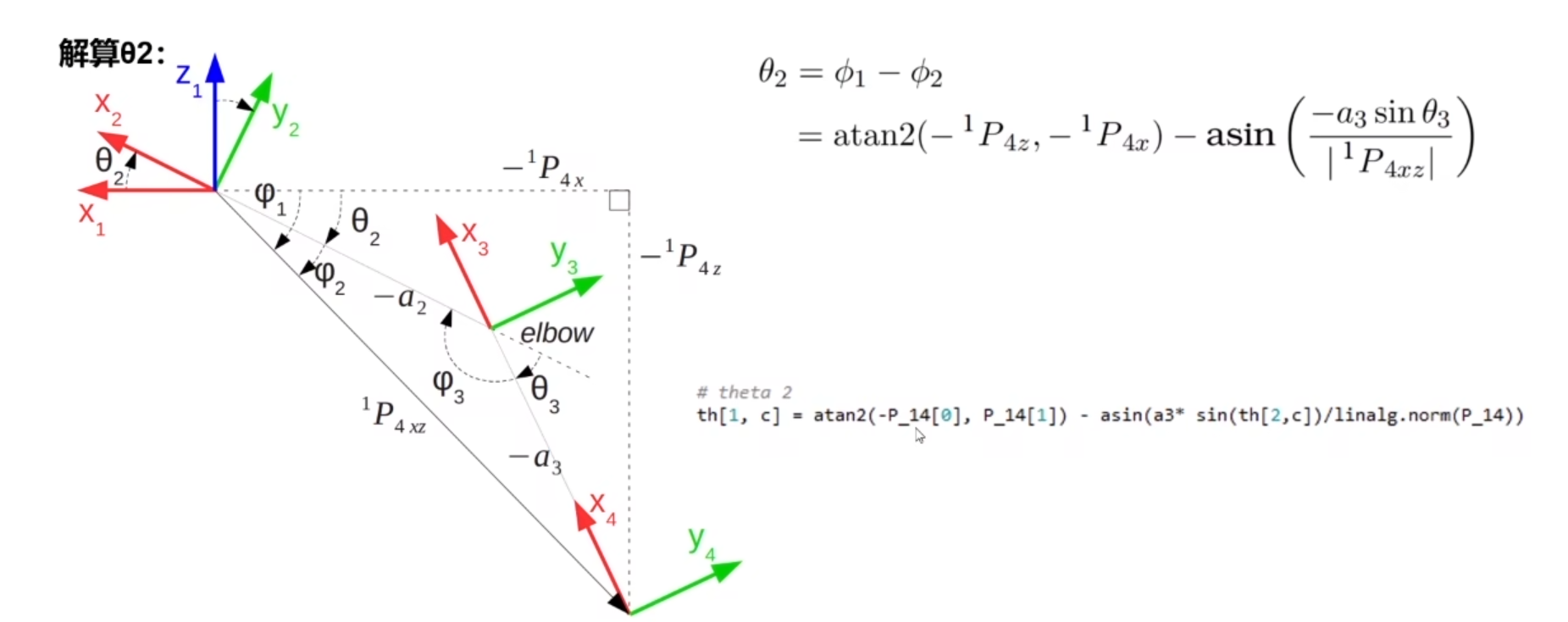
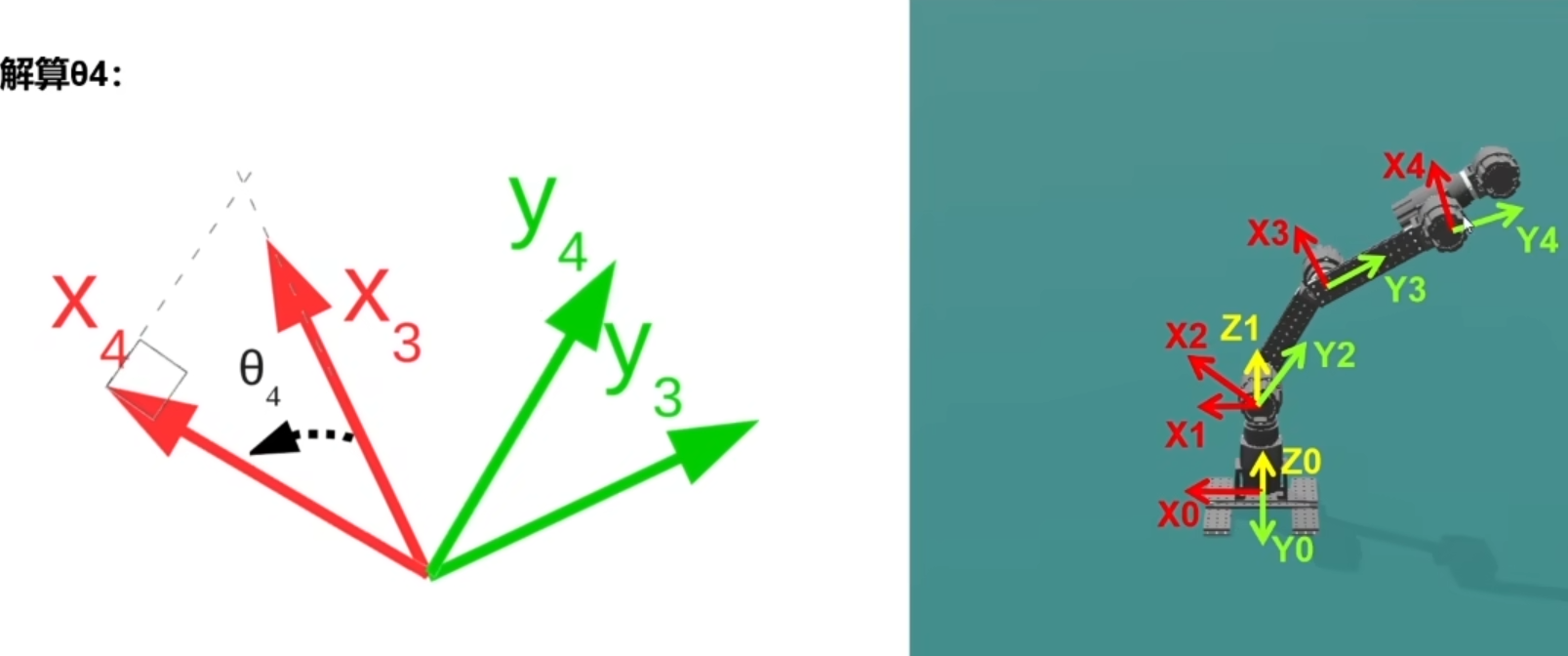
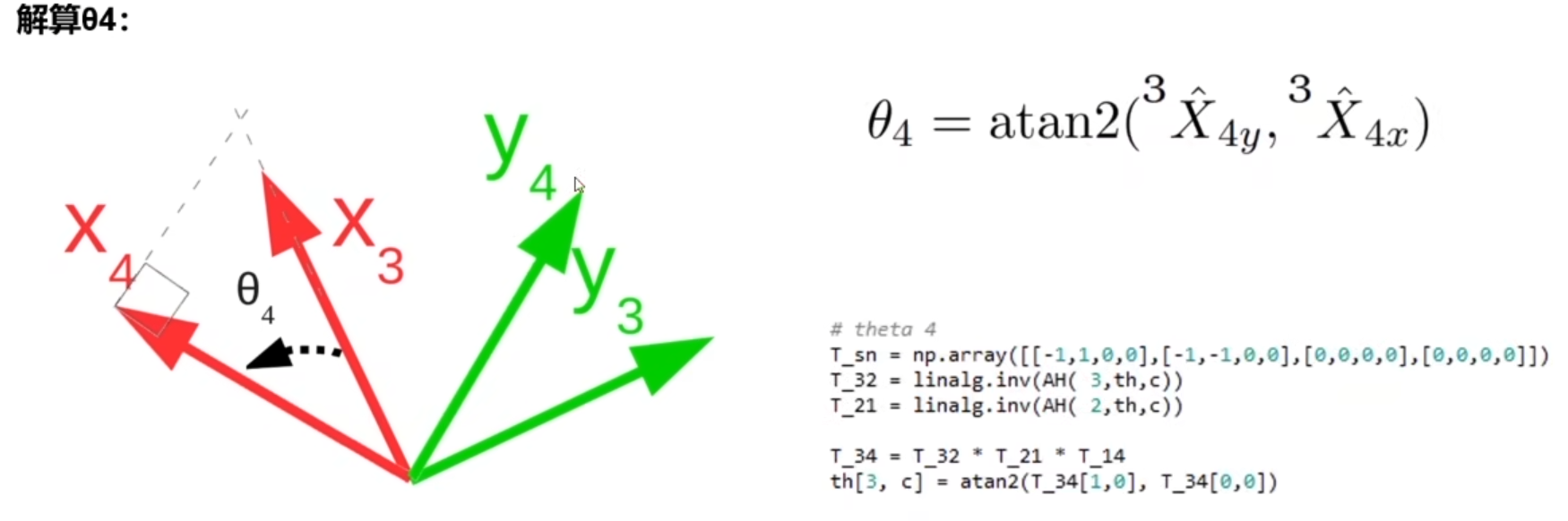
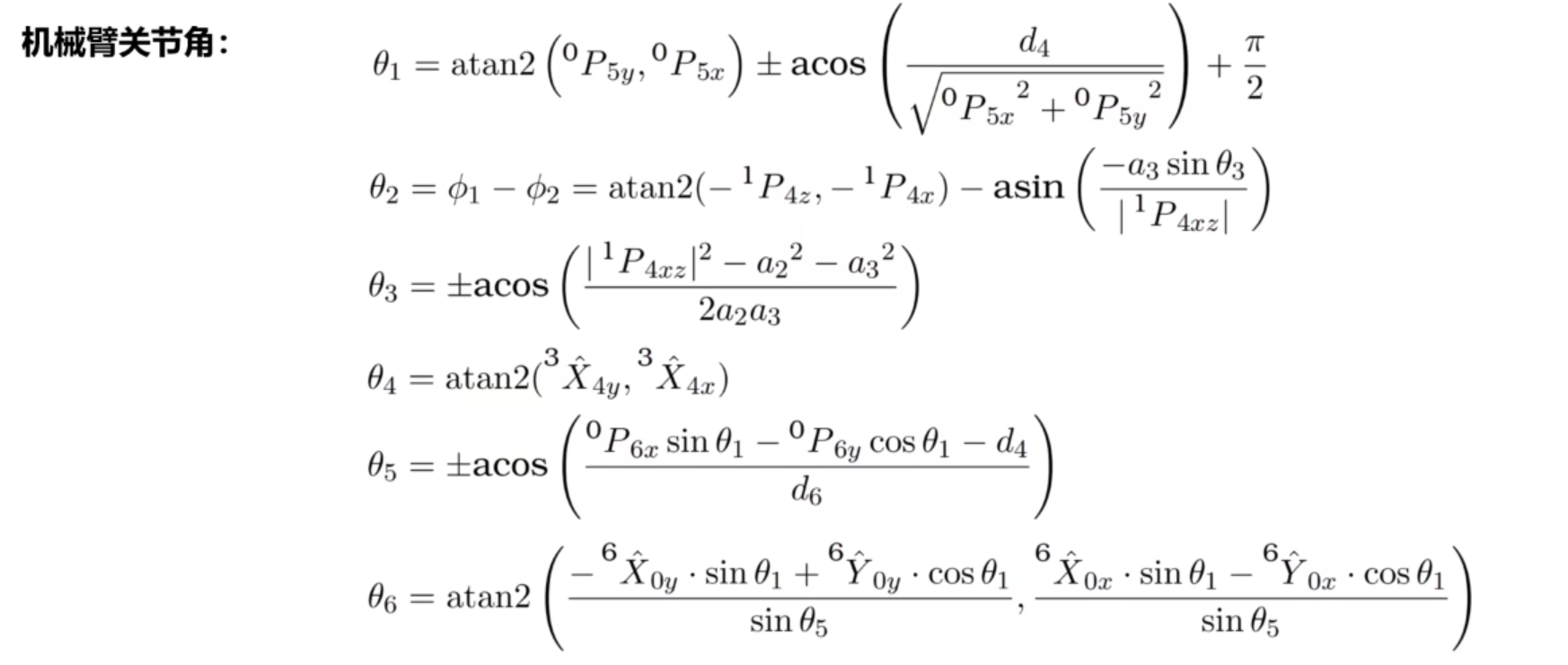
解算順序為:θ1、θ5、θ6、θ3、計算θ2、計算θ4。

?
03 實際分析
【【開源項目】【深度教學】手把手帶你實現視覺引導機械臂抓取(STM32+OPENMV方案)】
只需分析前四個對末端有影響的舵機
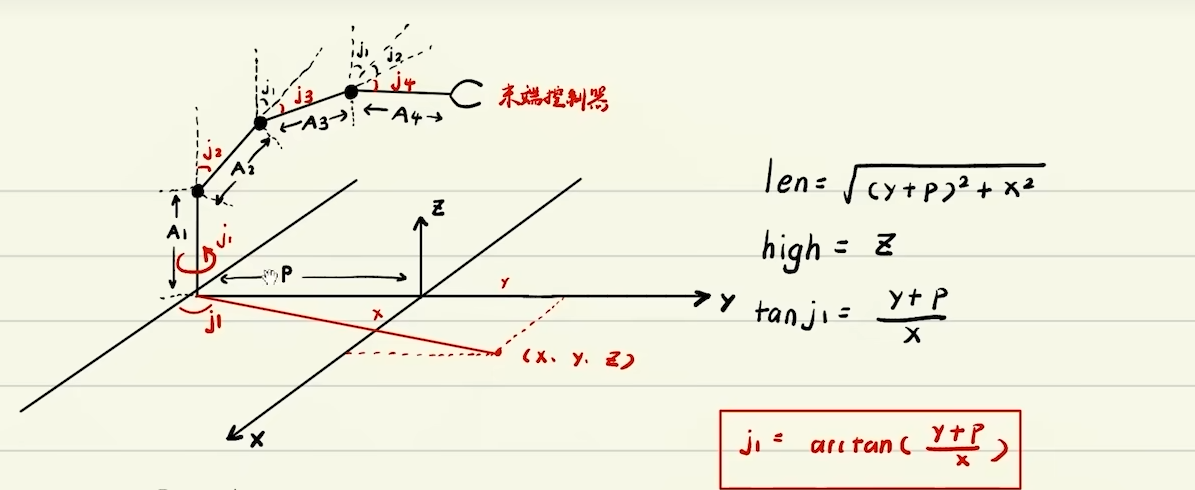
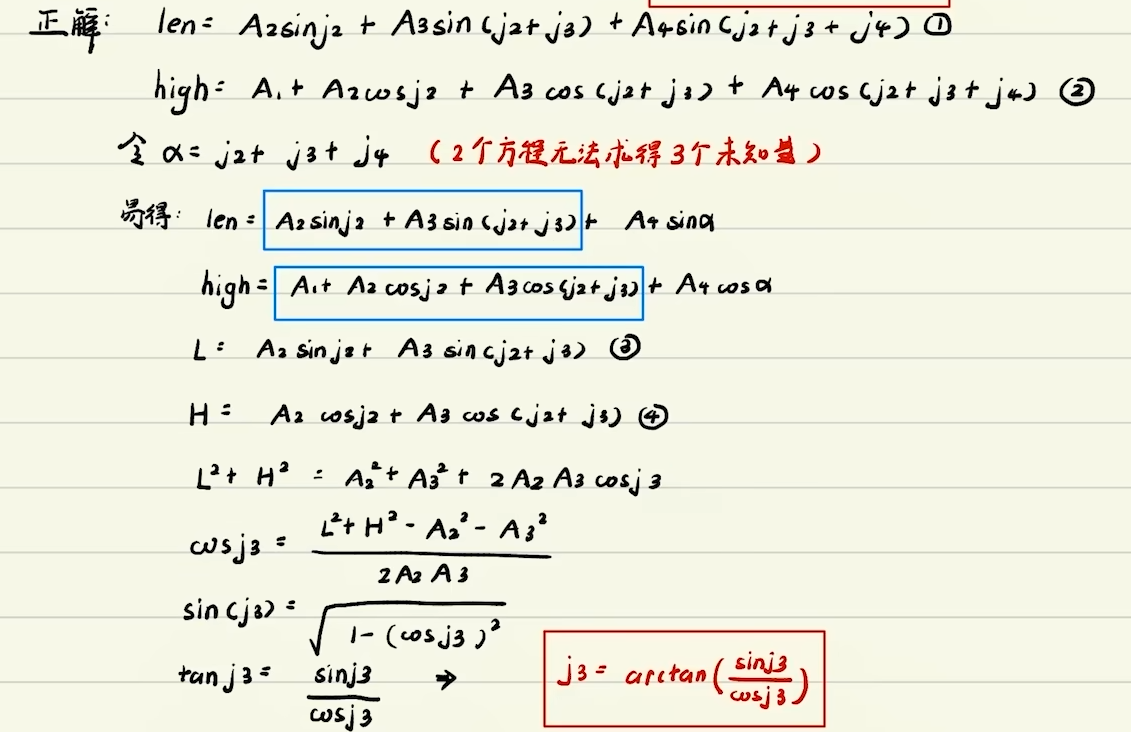

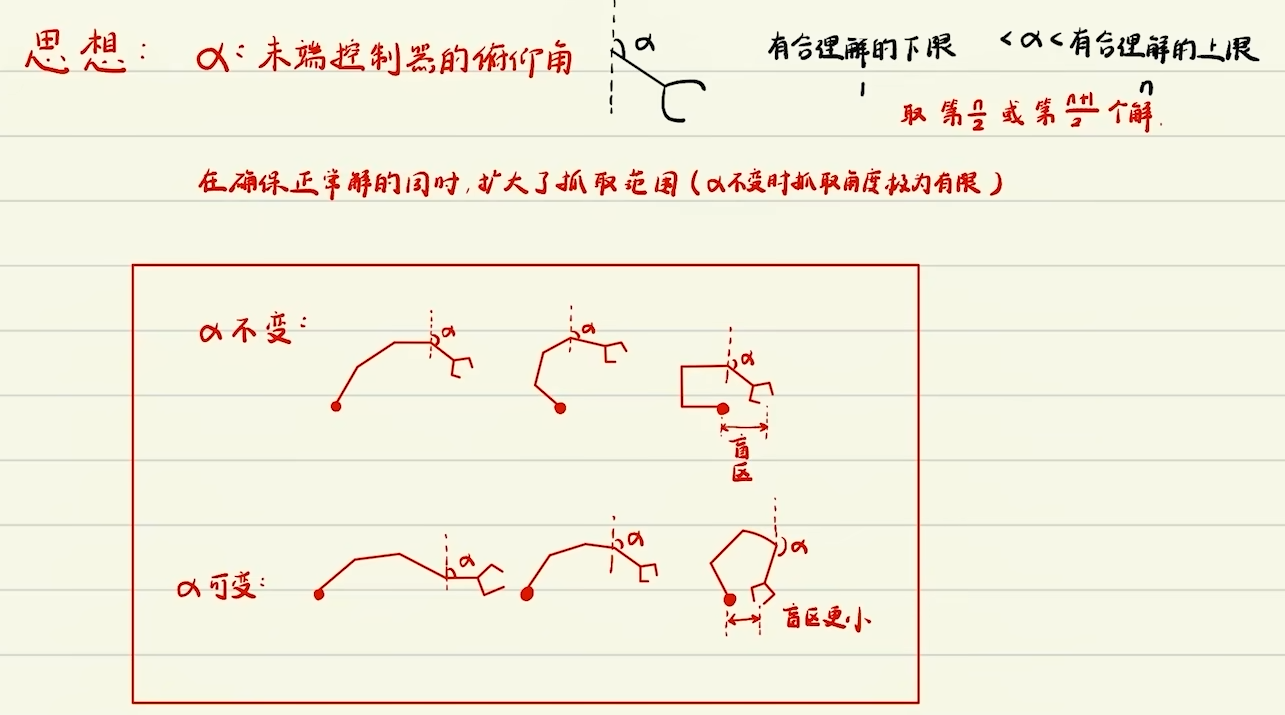
P_max = A2+A3+A4
04 開源資料

【[開源]人人都能復刻的下棋&分揀機器人】 https://www.bilibili.com/video/BV1dg4y1T7BX/?share_source=copy_web&vd_source=6169cf50b220a7982d3769ff4691feb6
鐵憨憨(code): 鐵憨憨的源碼

:使用sqlite存儲查詢并驗證用戶名和密碼)



——圖像拼接)



顏色空間轉換-----將圖像從 RGB 色彩空間轉換到 HSV色彩空間RGB2HSV())






」里最隱形的殺手)


