目錄
1、前提 條件?
2、詳細步驟?
3、故障 排除?
無人機的電調校準,ESC Calibration,PX4使用手冊電調校準詳細步驟
參考:ESC 校準 |PX4 指南 (v1.15)?
?信息
這些說明僅與?PWM ESC?和?OneShot ESC?相關。DShot?和?CAN?ESC (DroneCAN/Cyphal) 不需要這種校準。
電子速度控制器 (ESC) 根據來自飛行控制器 (FC) 的輸入命令調節電機速度(和方向)。ESC 將響應的輸入命令范圍通常是可配置的,即使同一型號的 ESC 之間也可能不同,默認范圍也可能不同。
此校準使用來自飛控的固定最大 (2000us) 和最小 (1000us) PWM 輸入更新所有 ESC。隨后,機體上的所有 ESC/電機將在整個輸入范圍內以相同的方式響應飛行控制器的輸入。
建議所有支持此工具的 PWM/OneShot ESC 使用此工具進行校準。
信息
校準對于低成本 ESC 尤為重要,因為它們對輸入的響應通常差異很大。
但是,也建議將其用于高質量的控制器。盡管這些是工廠校準的,并且都應該以相同的方式響應,但實際上 input 范圍可能會有所不同。例如,如果控制器在出廠后進行了手動校準,則它可能不再以相同的方式運行。
警告
如果您想使用不支持此校準的 ESC,則必須對其進行工廠校準,并且開箱即用。這應該使用?Actuator Testing?進行驗證。跳轉到?actuator 配置步驟 (7)?(這仍然很重要)。
OneShot ESC 應在校準前配置為使用 OneShot。即使您之前已經校準過,也應在切換后校準 ESC。
1、前提 條件?
校準序列要求您能夠在手動為 ESC 供電時保持飛行控制器的電源。
如果使用 Pixhawk 飛控,推薦的方法是通過 USB 單獨為飛控供電,并在需要時連接/斷開電池為 ESC 供電。無法通過 USB 為自動駕駛儀供電的飛行控制系統將需要不同的方法。
如果電池通過電源模塊連接,則校準程序可以檢測電池連接并使用它來驅動校準序列。如果無法檢測到電池電量,則根據超時執行校準序列。
2、詳細步驟?
要校準 ESC:
-
拆下螺旋槳。
警告
切勿在打開螺旋槳的情況下嘗試 ESC 校準!
電調校準期間電機不應旋轉。但是,如果在 ESC 已經通電時開始校準,或者如果 ESC 沒有正確支持/檢測校準序列,則它將通過以最大速度運行電機來響應 PWM 輸入。
-
將您正在校準的 ESC 映射為車輛的?Actuator Configuration?中的電機。只有映射的執行器才能獲得輸出,并且只有映射為電機的 ESC 才會被校準。
-
拔下電池,斷開 ESC 的電源。飛行控制器必須保持通電,例如,通過將 USB 連接到地面站。
-
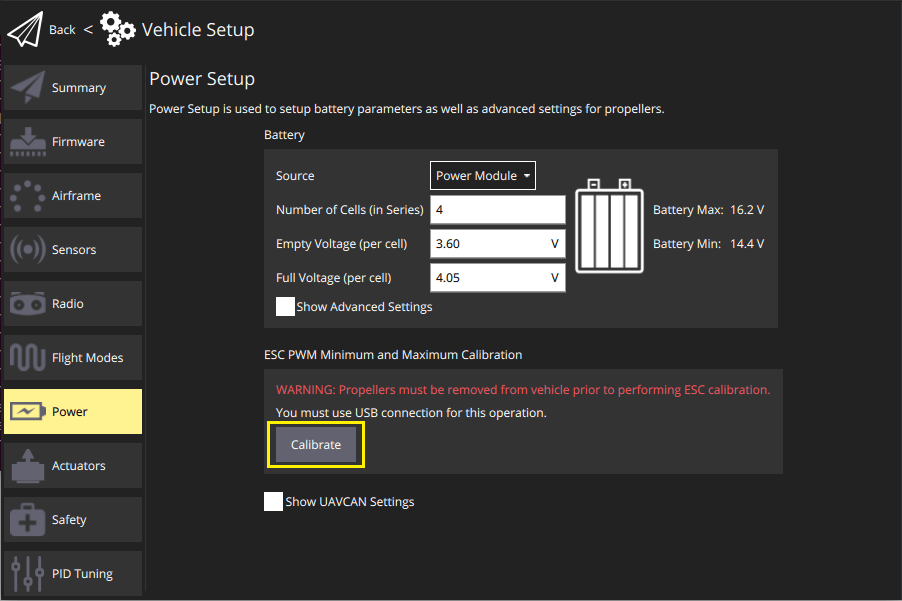
打開?QGroundControl?設置> Power,然后按?Calibrate?按鈕。
-
在無誤地啟動校準序列后,直接為 ESC 供電(應提示您):
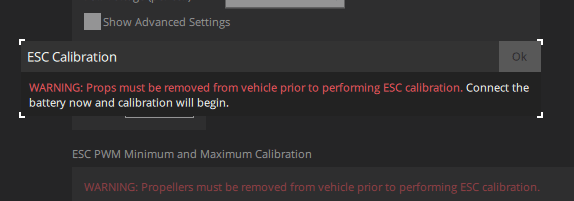
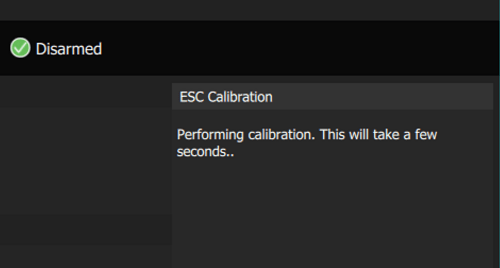
校準將自動開始:
-
在校準過程中,您應該會聽到 ESC 發出特定于型號的嗶嗶聲,這表示校準的各個步驟。
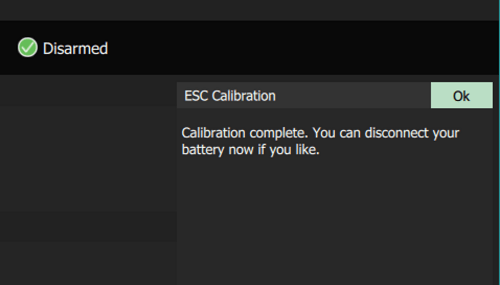
校準完成后,系統將提示您。
-
在 ESC 校準之后,具有相同(重新)校準的 ESC 的所有電機對于相同的輸入應以相同的方式運行。執行器配置中電機輸出的默認 PWM 設置現在應該開箱即用。
您需要確認電機確實工作正常。由于默認配置值已保守設置,因此您可能還希望針對您的特定 ESC 調整它們。
信息
以下步驟類似于?Actuator Configuration > Motor Configuration?中描述的步驟。
驗證以下值:
-
電機的最小值 (default: ) 應使電機緩慢但可靠地旋轉,并在停止后可靠地旋轉。
1100us在執行器測試中,您可以通過啟用滑塊,然后將電機的測試輸出滑塊移動到從底部開始的第一個捕捉位置來確認電機至少旋轉(仍然沒有螺旋槳)。正確的值應使電機在您將滑塊從已撤防移動到最小值時立即可靠地旋轉。
要找到 “最佳” 最小值,請將滑塊移動到底部 (已撤防)。然后以小增量增加 PWM 輸出的設置(例如 1025us、1050us 等),直到電機開始可靠地旋轉(最好太高總比太低好)。在所有電機 PWM 輸出的設置中輸入此值,并將輸出恢復為 。
disarmedminimumdisarmed1100us -
應選擇電機的最大值 (default: ) ,以便增加該值不會使電機旋轉得更快。
1900us您可以通過將關聯的測試輸出滑塊移動到頂部位置來確認電機是否以?Actuator Testing?中的最大設置快速旋轉。
要找到 “最佳” 最大值,首先將滑塊移動到底部 (已撤防)。然后將 PWM 輸出的設置增加到接近默認的最大值 () - 電機應該會旋轉。當您以增量方式增加輸出的 PWM 最大值時(例如 1925us、1950us 等),請聆聽電機的音調。當您增加輸出值時,電機的聲音不會發生變化時,就會找到最佳值。在所有電機 PWM 輸出的設置中輸入此值,并將輸出恢復為 。
disarmed1900maximumdisarmed1100us -
電機的 disarmed 值 (default: ) 應使電機停止并保持停止狀態。
1000us您可以在?Actuator Testing?中確認這一點,方法是將測試輸出滑塊移動到滑塊底部的捕捉位置并觀察電機不旋轉。
如果 ESC 以默認值 1000us 旋轉,則 ESC 未正確校準。如果使用無法校準的 ESC,則應將輸出的 PWM 輸出值降低到電機不再旋轉的水平(例如 950us 或 900us)以下。
信息
VTOL 和固定翼電機不需要任何特殊的 PWM 配置。使用默認的 PWM 配置,當自動駕駛儀發出命令時,它們將在飛行過程中自動停止。
-
3、故障 排除?
-
校準可以表明它已成功,即使它已失敗。
如果您沒有在正確的時間為 ESC 供電,或者 ESC 不支持校準,則會發生這種情況。發生這種情況是因為 PX4 沒有來自 ESC 的反饋來知道校準是否成功。您必須依靠在校準和后續電機測試期間解釋蜂鳴聲,以確定校準是否有效。
-
如果您配置并連接了電源模塊(出于安全原因),則無法開始校準。
首先拔下 ESC 的電源。如果您因為需要電源模塊來保持飛行控制器活動而被阻止,但您可以單獨為電調(取消)供電,您可以使用參數BATn_SOURCE暫時禁用電源模塊的檢測,僅用于 ESC 校準。一旦為自動駕駛儀供電的電源模塊不再被檢測為電池,就可以進行基于定時的校準。
-
如果系統在開始校準后立即檢測到電流消耗增加,PX4 將中止校準(出于安全原因)。這需要一個電源模塊。
詳解:如何打通鏈上與現實世界的關鍵橋梁?)

)






自適應調整,附代碼下載鏈接)
)
簡易template)







