1. 論文基本信息
發布于: 2022
2. 創新點
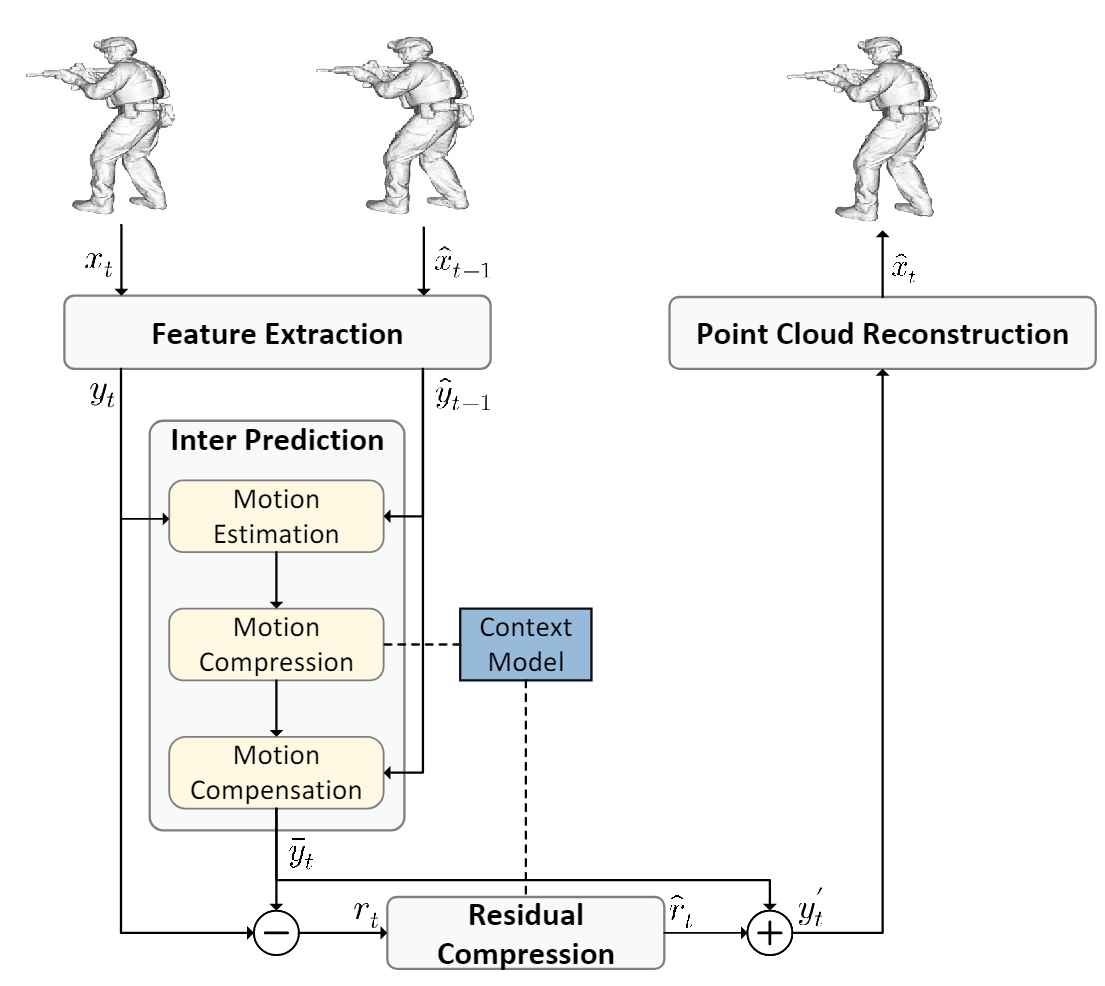
- 首先提出了一種端到端深度動態點云壓縮框架(D-DPCC),用于運動估計、運動補償、運動壓縮和殘差壓縮的聯合優化。
- 提出了一種新的多尺度運動融合(MMF)模塊用于點云幀間預測,該模塊提取和融合不同運動流信息尺度,用于精確的運動估計。
- 對于運動補償,論文提出了一種新穎的 3D 自適應加權插值 (3DAWI) 算法,該算法利用鄰居信息并自適應地減少遠距離鄰居的影響,從而對當前幀的特征產生逐點預測。
3. 背景
之前的方法例如 V-PCC 大多是采用將三維點云投影到二維平面上,然后采用成熟的視頻壓縮方法對投影后的點云進行壓縮,而基于幾何的 PCC 例如 G-PCC 在靜態點云上的壓縮取得了比較明顯的進步。因此本文旨在提供一種端到端的動態點云壓縮框架。
大多數學習到的 SPC 壓縮方法都建立在密集對象點云的自動編碼器架構之上 ,它將 SPC 壓縮分為三個連續的步驟:特征提取、深度熵編碼和點云重建。然而,將 SPC 壓縮網絡直接遷移到 DPC 并非易事。關鍵的挑戰是將運動估計和運動補償嵌入到端到端壓縮網絡中,以消除時間冗余。
4. Pipeline
4.1. 特征提取
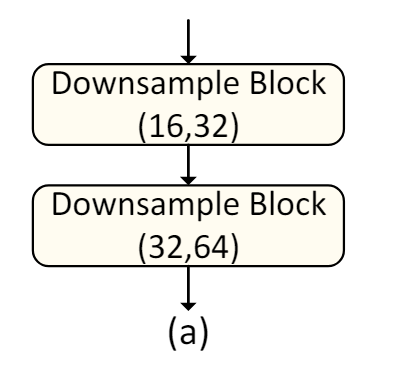
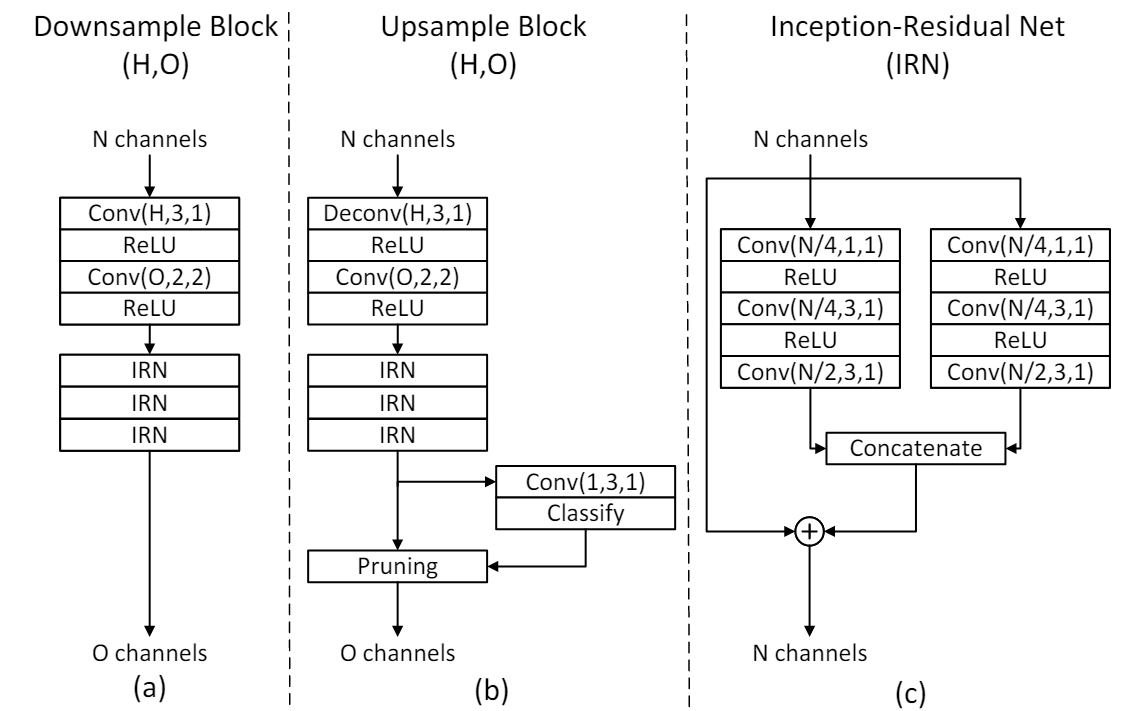
采用基于稀疏 CNN 的下采樣塊(圖 3(a))進行低復雜度的點云下采樣。下采樣塊由用于點云下采樣的步幅兩個稀疏卷積層組成,然后是幾個初始殘差網絡 (IRN) 塊用于局部特征分析和聚合。
4.2. 幀間預測
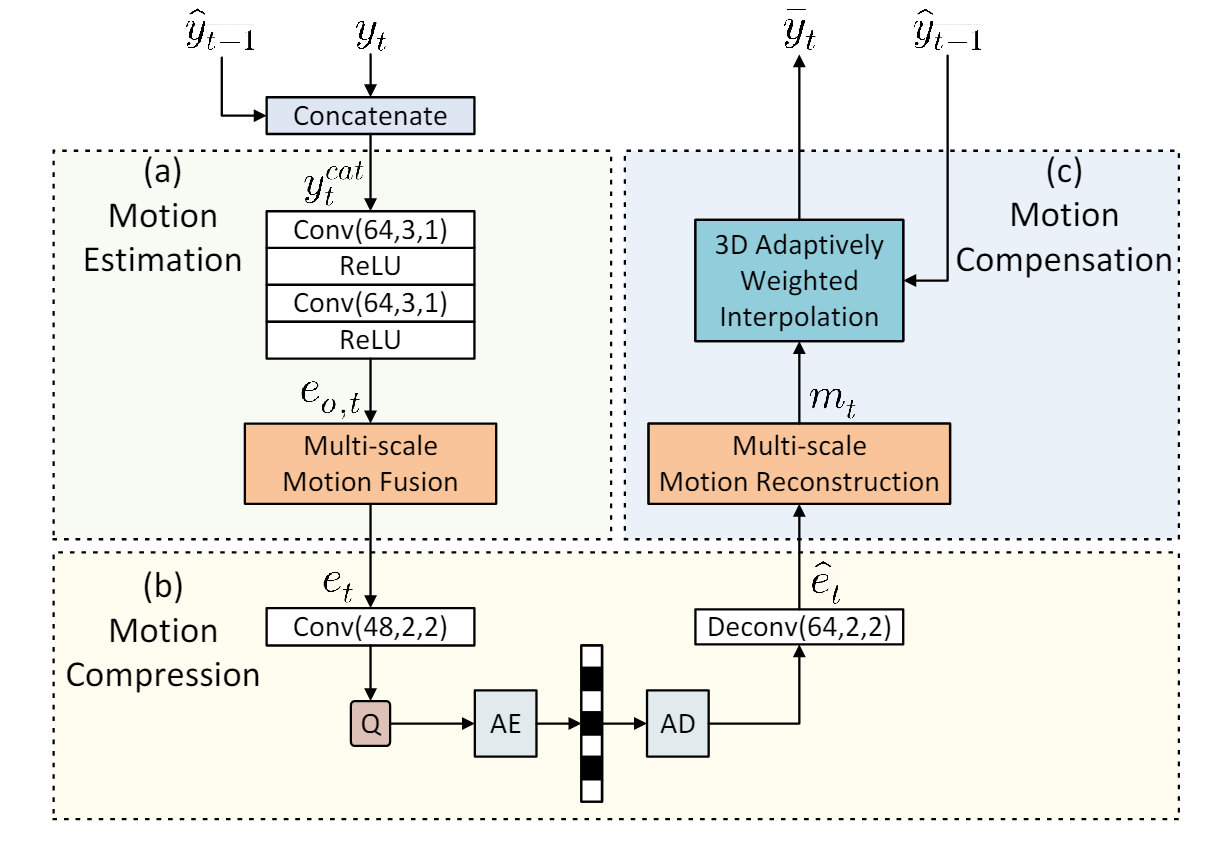
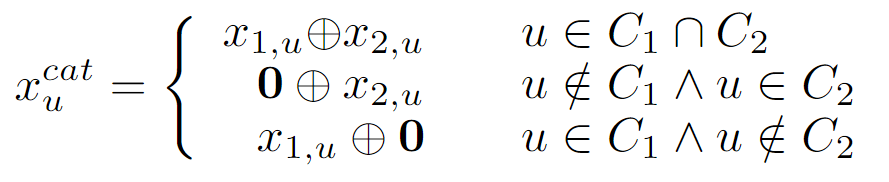
預測模塊的整體架構如圖4所示。具體來說,我們首先將 yt 和 ?yt?1 連接在一起得到 y cat t。點云的連接操作定義為:
4.3. 多尺度運動融合
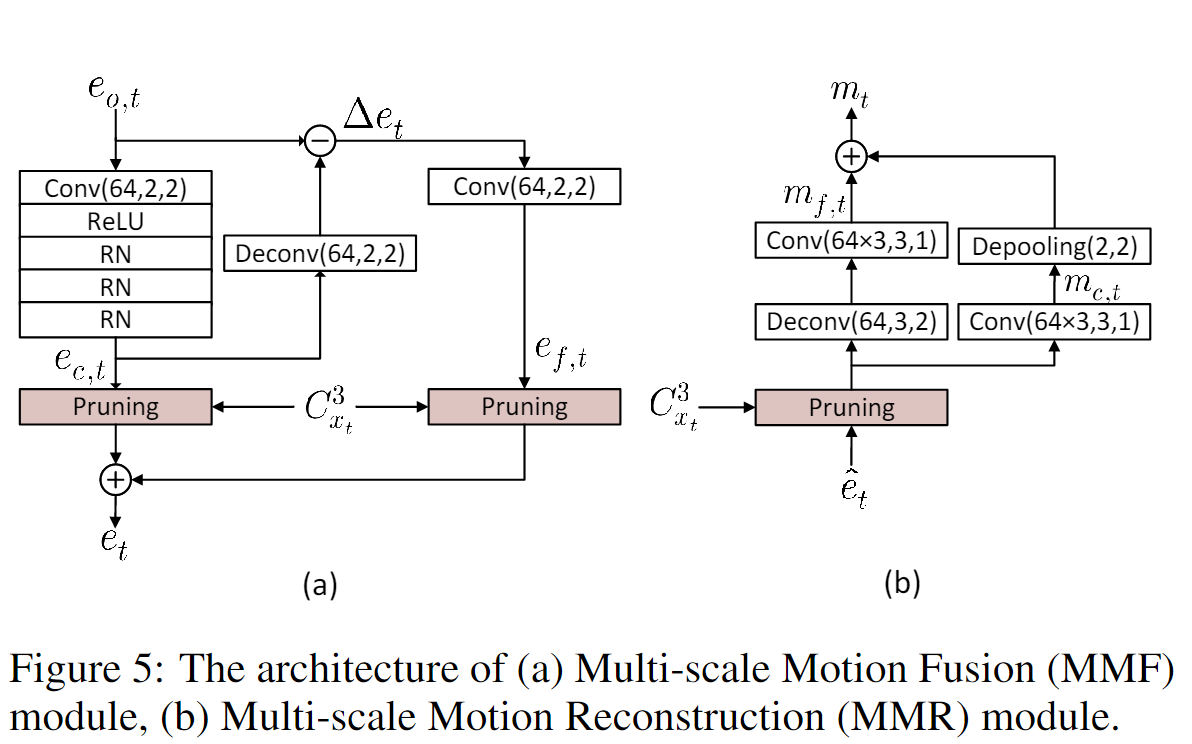
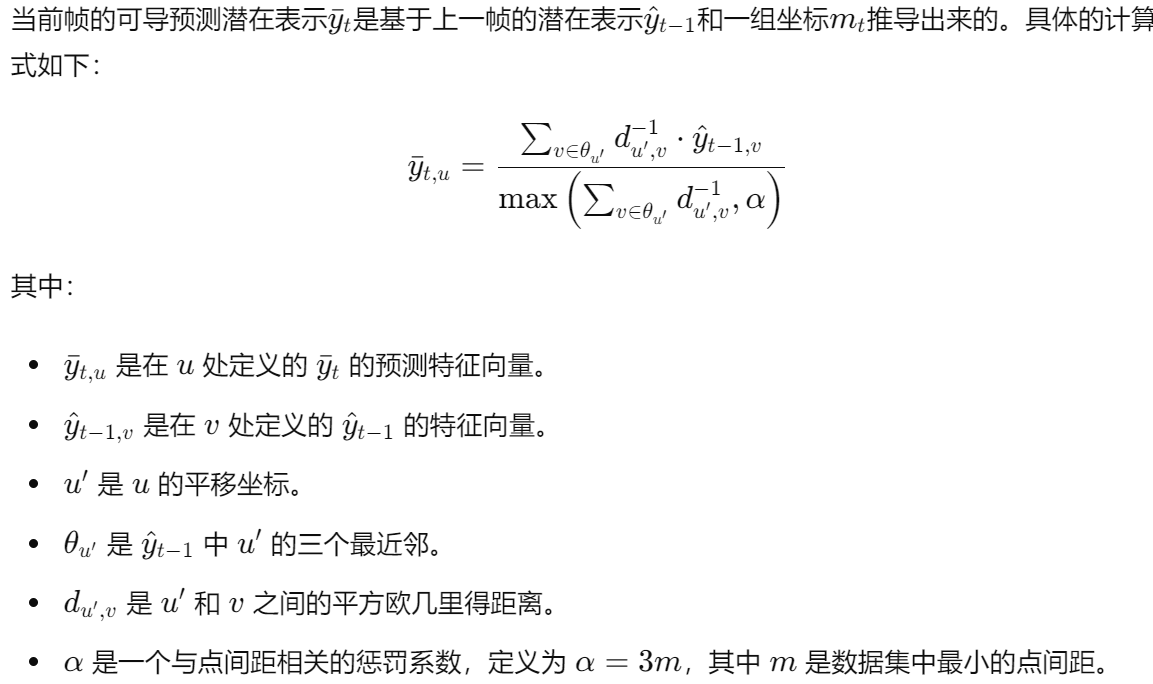
4.4. 3D 自適應加權插值
4.5. 殘差壓縮
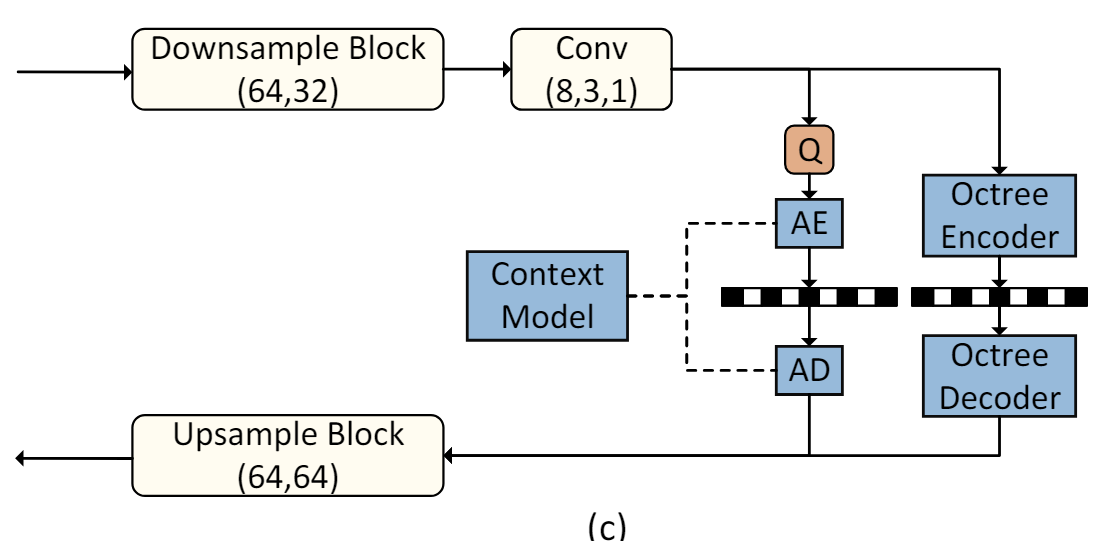
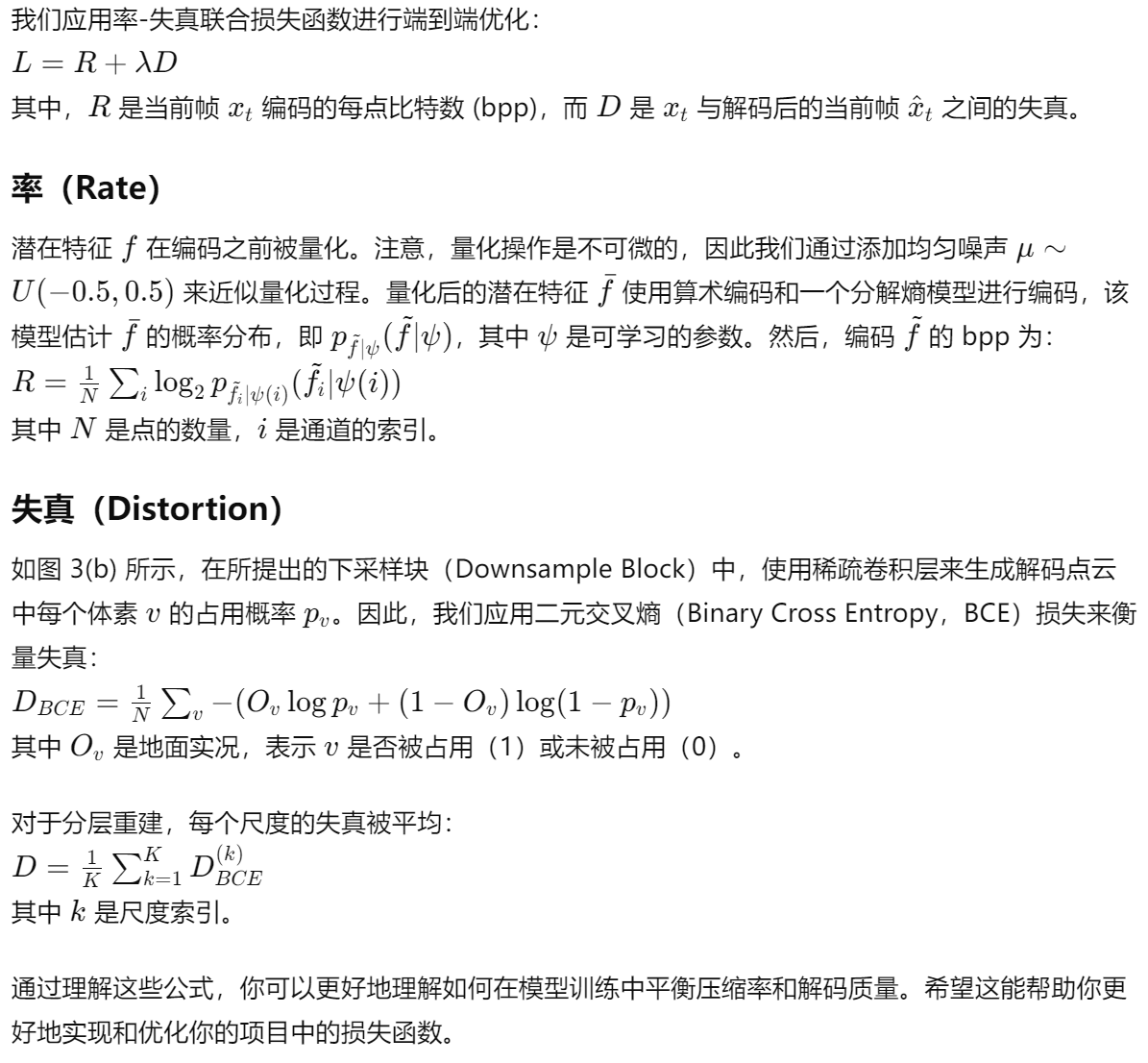
4.6. 損失函數
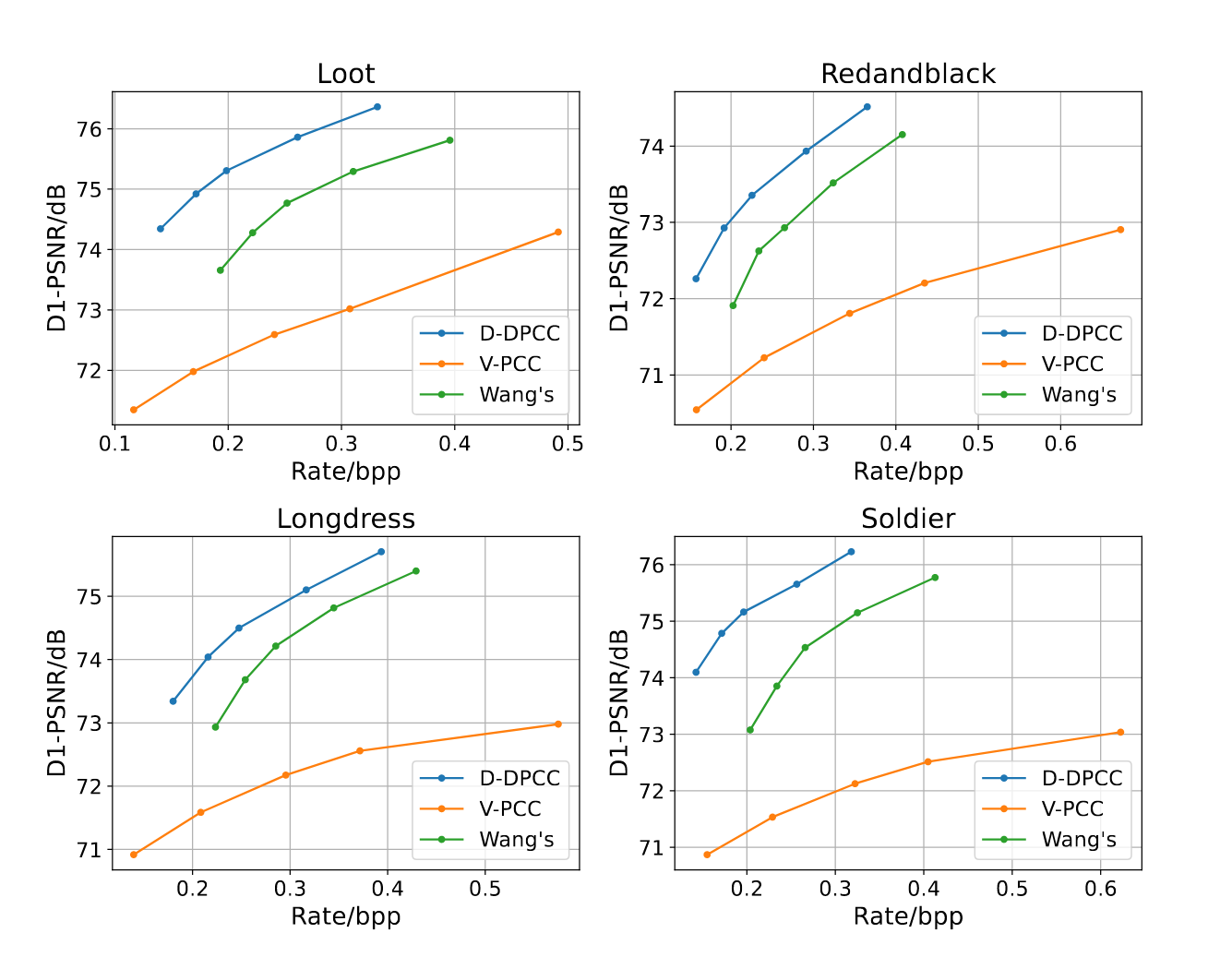
5. 💎實驗成果展示
6. 源碼環境配置:
GitHub - ttlzfhy/D-DPCC: The codes of D-DPCC: Deep Dynamic Point Cloud Compression via 3D Motion Prediction.







![叁[3],使用Newtonsoft.Json.dll,異常記錄](http://pic.xiahunao.cn/叁[3],使用Newtonsoft.Json.dll,異常記錄)











