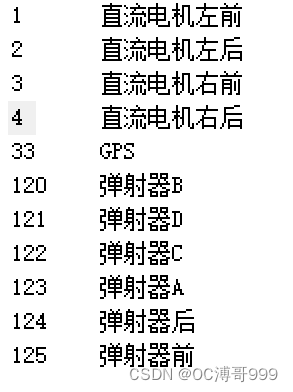
 這是給機器人設置的端口,對照用
這是給機器人設置的端口,對照用
代碼
#
#'作者:溥哥’
##機器人驅動主程序
#請在main中編寫您自己的機器人驅動代碼
import msvcrt
def main():a="none"while True:key_input = msvcrt.getch()a=key_inputif a==b'w':print(a)robot_drv.set_motors(1,40,2,40,3,40,4,40)robot_drv.sleep(100)robot_drv.stop_all_motor()if a==b's':print(a) robot_drv.set_motors(1,-45,2,-45,3,-45,4,-45)robot_drv.sleep(160)robot_drv.stop_all_motor()if a==b'd':print(a) robot_drv.set_motors(1,25,2,25,3,-25,4,-25)robot_drv.sleep(20)robot_drv.stop_all_motor()if a==b'a':print(a) robot_drv.set_motors(1,-25,2,-25,3,25,4,25)robot_drv.sleep(20)robot_drv.stop_all_motor()if a==b'e':robot_drv.set_motors(1,55,2,55,3,55,4,55)robot_drv.sleep(100)robot_drv.stop_all_motor()if a==b'f':for i in range(20):robot_drv.tanshe(120,5100,121,5100,122,5650,123,5650,124,32767)if a==b'r':for i in range(20):robot_drv.tanshe(124,32767,123,1300,124,1300)# *********************************************
# 以下為初始化代碼,請不要修改或者刪除
# *********************************************
import sys
import irobotq_robotdriver as robot_drvif __name__ == '__main__':try:ret=robot_drv.init(sys.argv[1],sys.argv[2],int(sys.argv[3]))if(ret == 0):main()robot_drv.over()print("機器人程序運行結束")else:print('初始化錯誤,錯誤碼:%d' % ret)print('按任意鍵退出')v=input()except Exception as e:print (e)print('按任意鍵退出')v=input()#該代碼適用于蘿卜圈python編譯器1.6.2.2
效果(僅供參考)











CVE-2020-1472 NetLogon權限提升漏洞)





異常處理注解)
)

 線程池 執行器)