在機器人仿真中, 經常會用到鍵盤控制程序teleop_twist_keyboard 對機器人進行控制。但是對各個鍵值是何種含義, 如何操作并沒有任何資料介紹,初次使用時會不知所措。
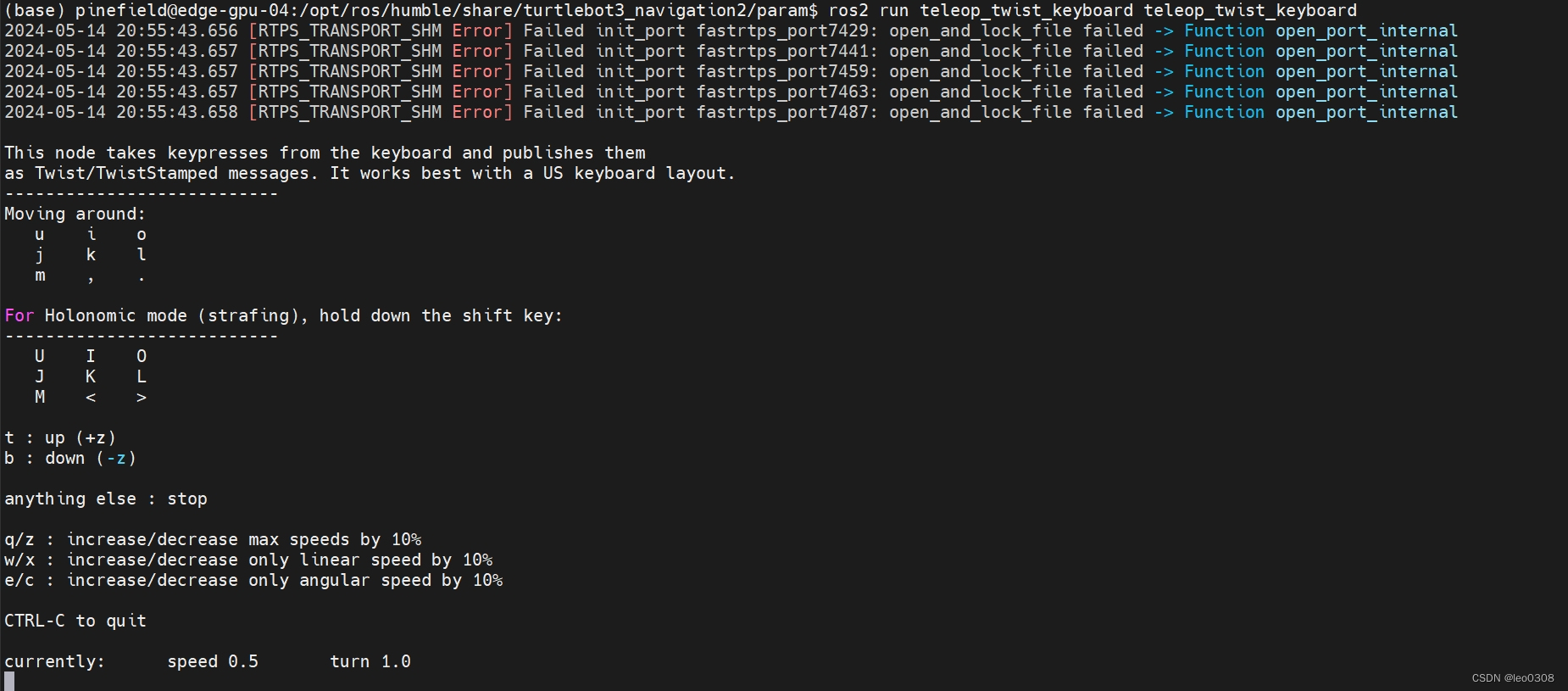
通過實踐, 發現各個鍵值的作用如下:
u-- 向左前方前進
i-- 直行前進
o-- 向右前方前進
j-- 逆時針旋轉
k-- 停止
l-- 順時針旋轉
m-- 向左后方后退
,-- 后退
. – 向右后方后退
q – 增加速度
z – 減小速度
操控小技巧: 開始操控不熟練時, 可以通過z 進行減速, 更容易控制。也可以用k鍵讓機器人停止運動, 觀察好了在讓機器人運動。
注意進行掃描建圖時, 盡量不要讓機器人撞到障礙物, 非常影響建圖精度。










)








