在上一節中,使用了靜態模型,我們推導出了卡爾曼濾波的狀態更新方程,但是在實際情況下,系統都是動態,預測階段,前后時刻的狀態是改變的,此時我們引入預測方程,也叫狀態外推方程;
同樣的我們通過一個例子來分析,在開始為什么要選擇卡爾曼濾波時,提出了一個例子;
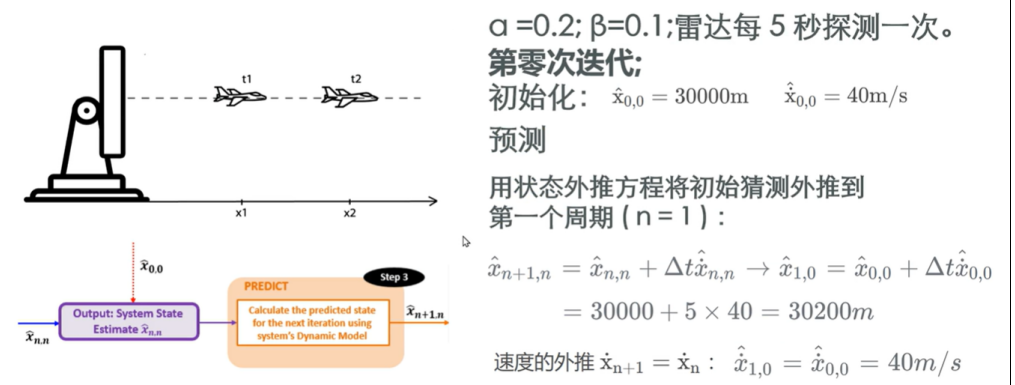
在一維空間內使用雷達來追蹤勻速飛行的飛行器,此時系統狀態為飛行器的航程,速度是相對于時間的變化率,也就是距離的導數;
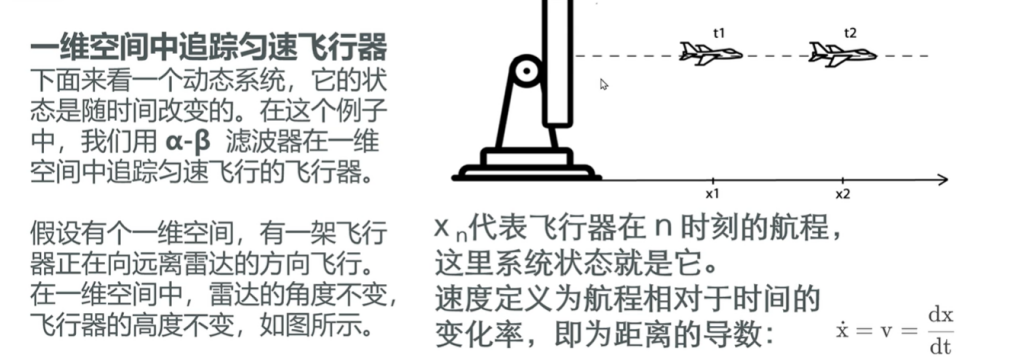
通過分析飛行器的一維物理模型,可以得到,速度恒定時,航程等于當前時刻的的航程加上時間變化*速度(距離的導數) ;
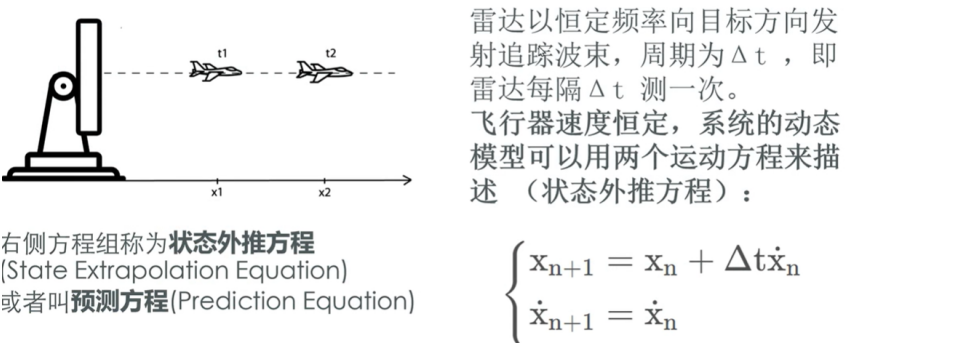 ?得到的動態模型,我們稱為狀態外推方程或者預測方程;
?得到的動態模型,我們稱為狀態外推方程或者預測方程;
具體化這個例子:
 對于存在問題,我們分析得到兩種情況:一個是雷達的誤差,另外就是飛行器速度改變了;
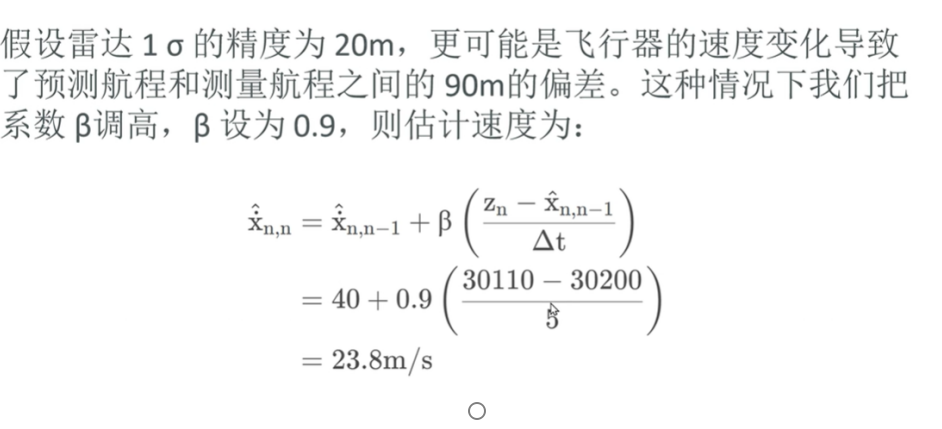
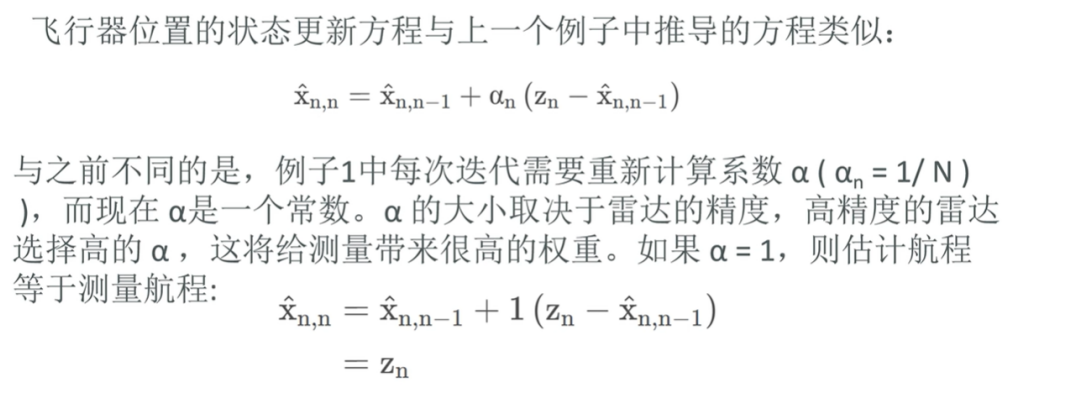
對于存在問題,我們分析得到兩種情況:一個是雷達的誤差,另外就是飛行器速度改變了;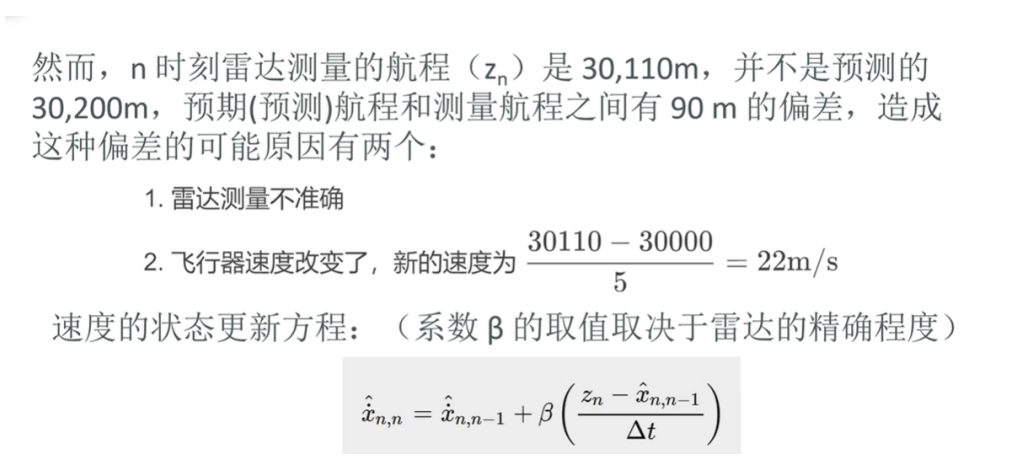 假設雷達的精度是20m,此時的誤差更可能是由于飛行器速度發生了改變,那么此時我們更信任雷達的測試結果,所以我們將系數調高(當系數β=1時,估計值結果=測量值);
假設雷達的精度是20m,此時的誤差更可能是由于飛行器速度發生了改變,那么此時我們更信任雷達的測試結果,所以我們將系數調高(當系數β=1時,估計值結果=測量值);
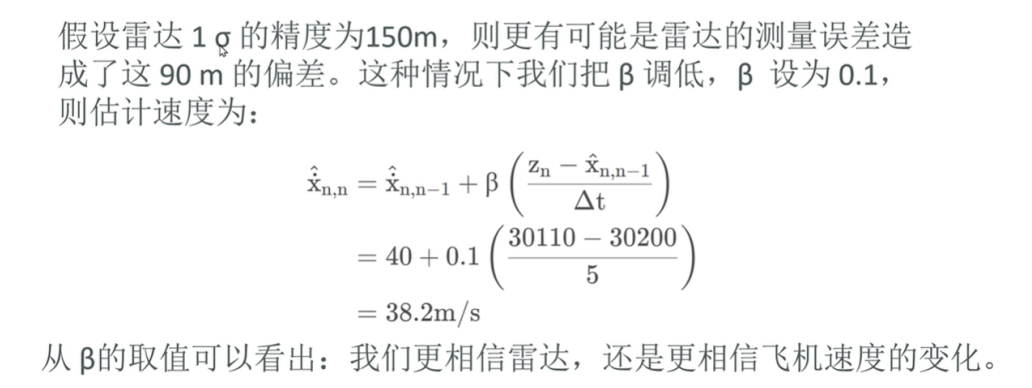
?假設雷達的精度是150m,此時的誤差更可能是由于雷達誤差結果,那么此時我們更信任飛機速度變化,所以我們將系數調低(當系數β=0時,估計值結果=先驗估計值);
 ?
?
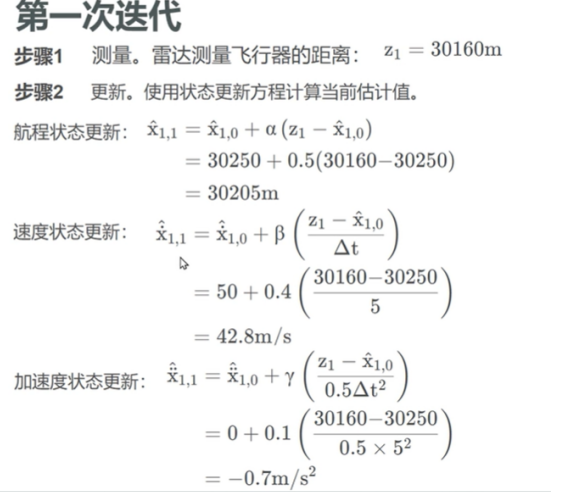
 具體流程:根據分析,我們設置權重因子,開始第0次迭代,首先依然是初始化,輸入估計值,與上一個例子不同是,此時我們是動態模型,預測后,先驗估計值與輸入值是不同的;
具體流程:根據分析,我們設置權重因子,開始第0次迭代,首先依然是初始化,輸入估計值,與上一個例子不同是,此時我們是動態模型,預測后,先驗估計值與輸入值是不同的;
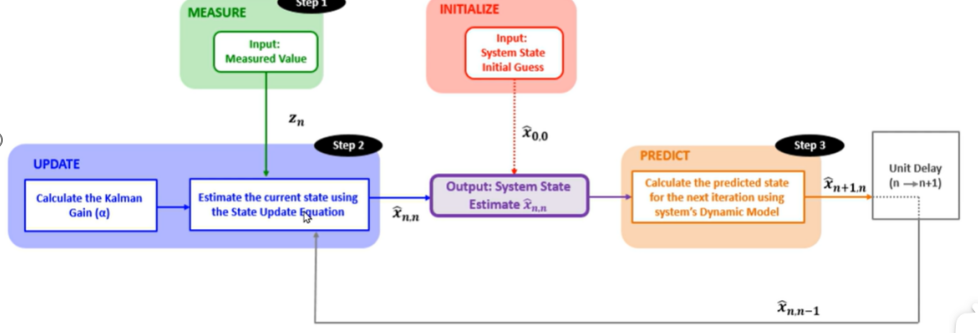
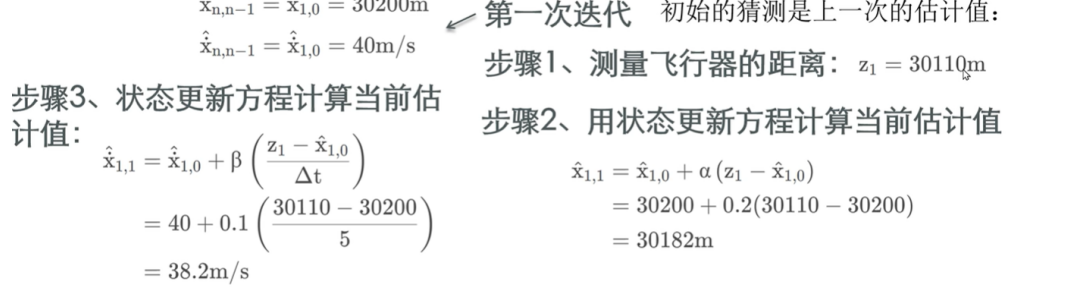
將預測的結果作為輸入給到狀態更新方程,同時輸入測量值,通過狀態更新方程計算當前估計值;
?
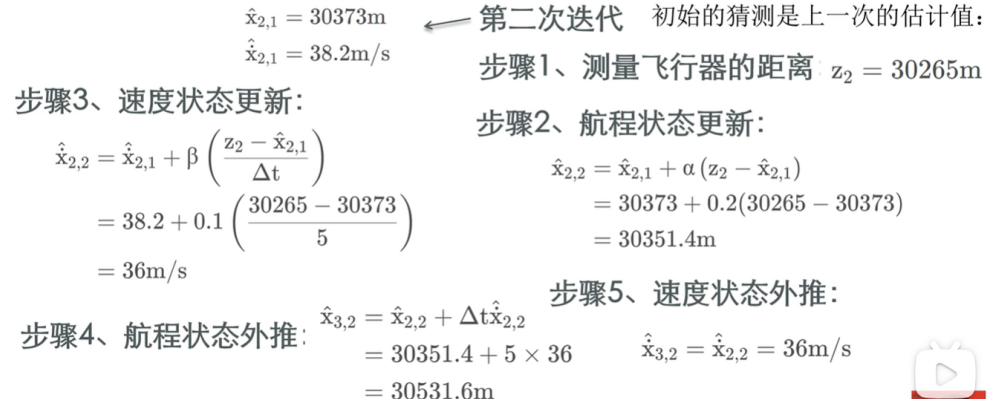
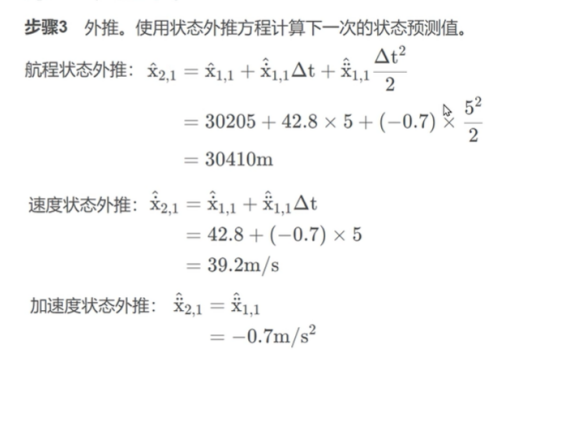
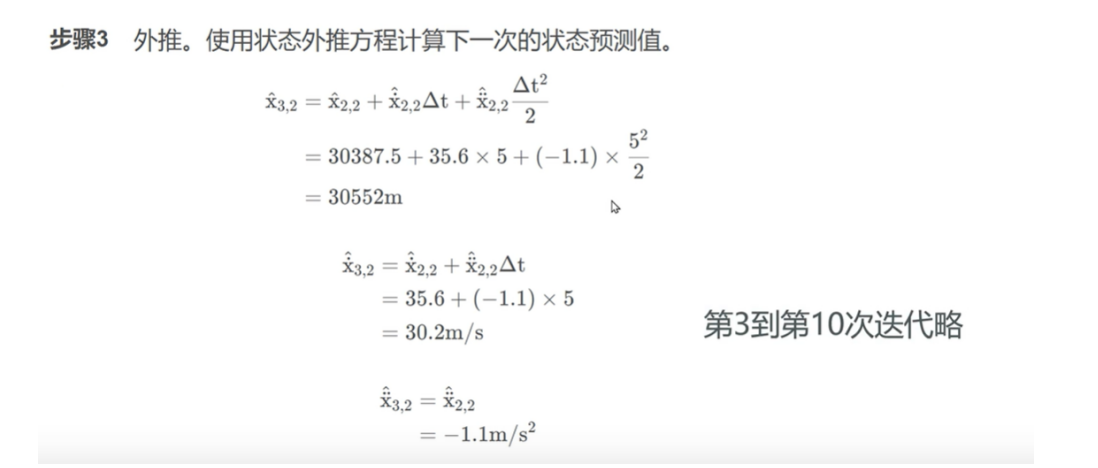
繼續預測下一刻的先驗估計值;?
 ?
?
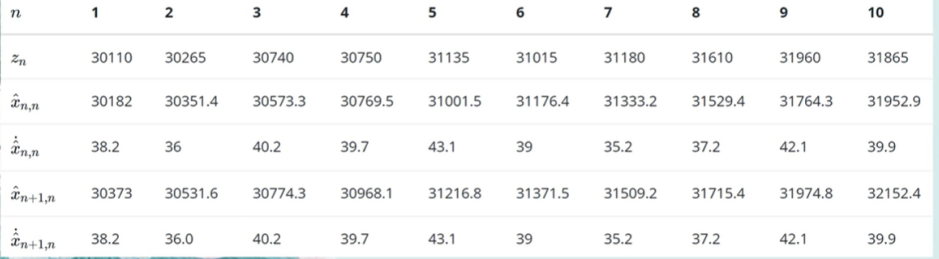
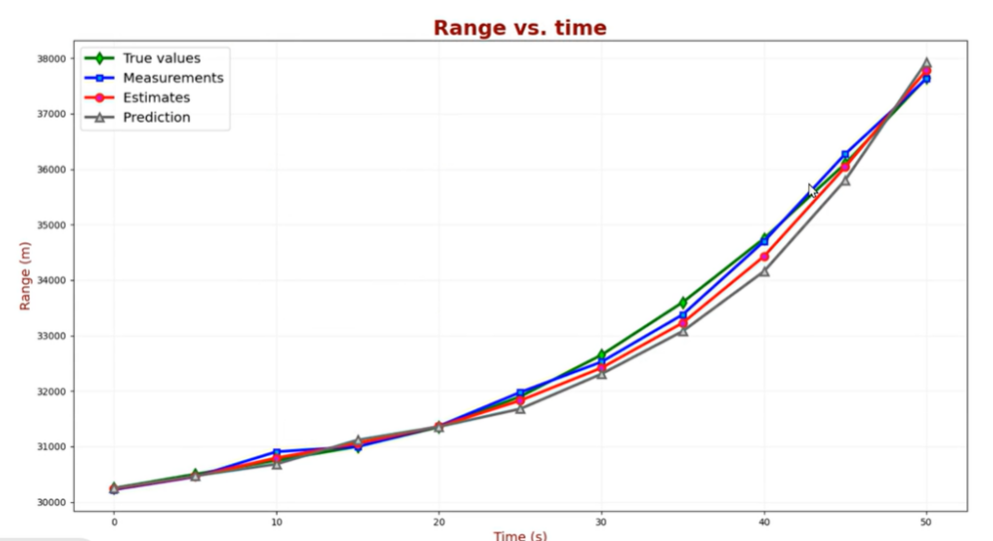
不斷迭代:最終我們得到結果
 ?
?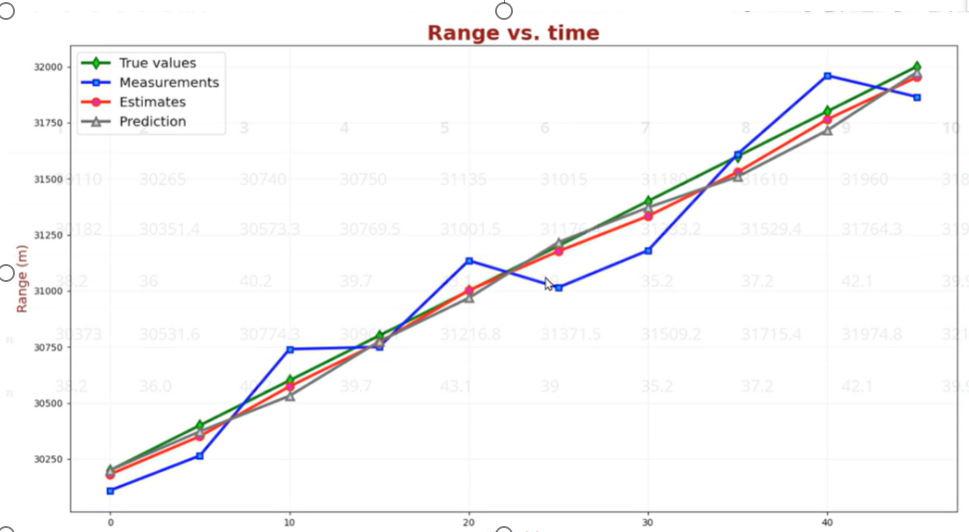
?我們可以看出,可以看到估計算法對估計結果有平滑作用,并且估計結果趨近真實值。
嘗試改變權重因子:
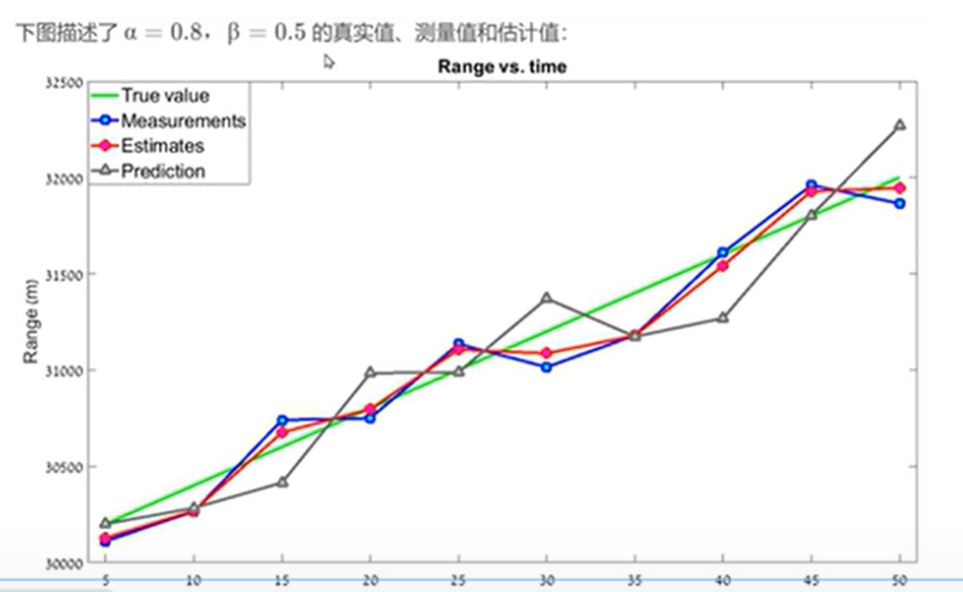
結果并不理,所以濾波器系數的選擇是至關重要的;
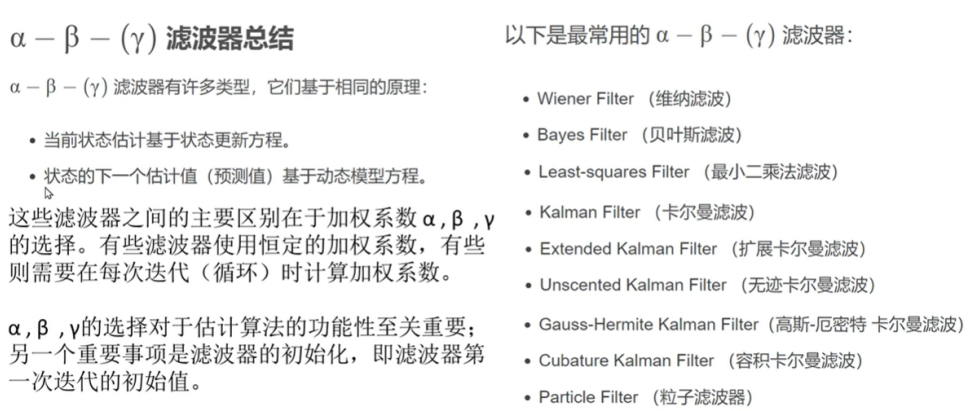
濾波器系數的選擇:
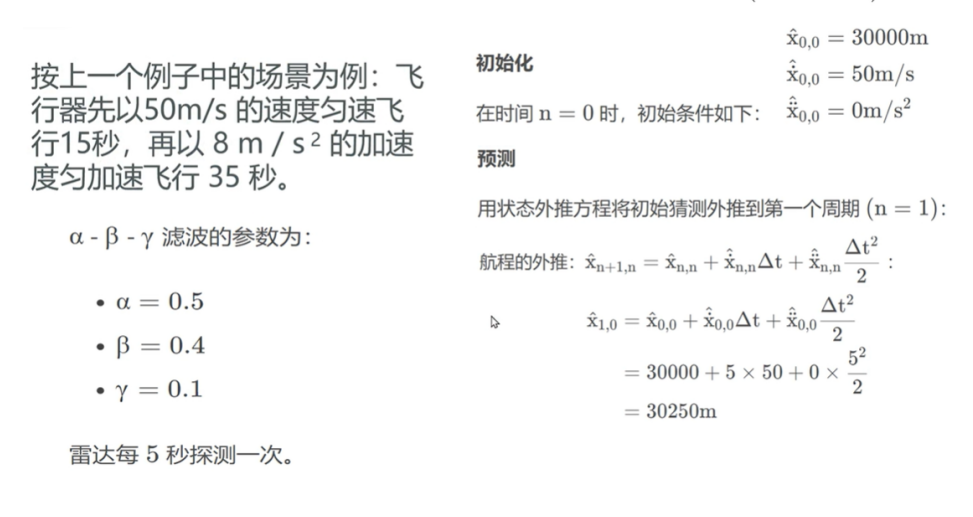
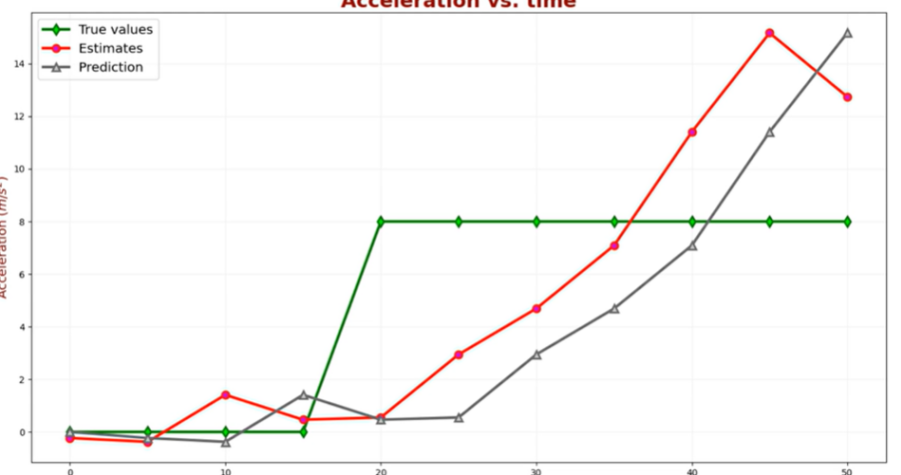
對于這個案例,系統狀態為航程情況下,動態改變的除了速度還可能有加速度,例如現在來一架戰斗機,它先以50m/s 的恒定速度飛行 15 秒然后以 8 m/s2 的加速度勻加速飛行 35秒。入圖顯示了目標航程、速度、加速度隨時間的變化。此時α-β兩個系數將不能滿足我們的需求,依然使用該濾波器,分析:
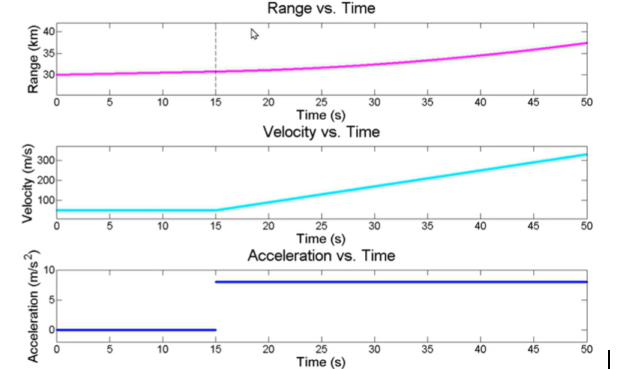
會發現,誤差非常大: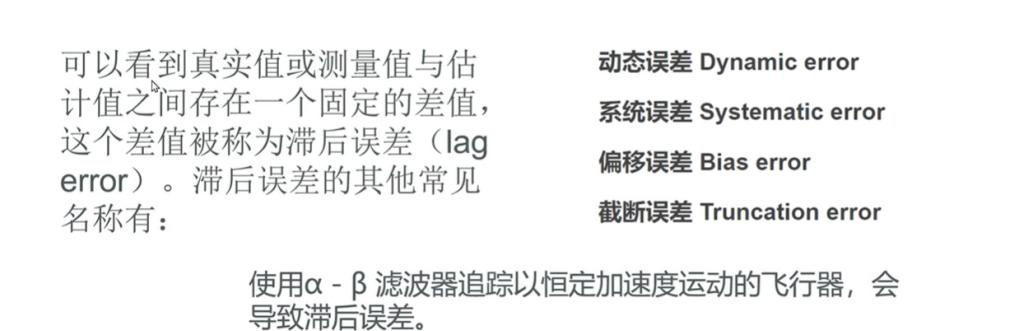
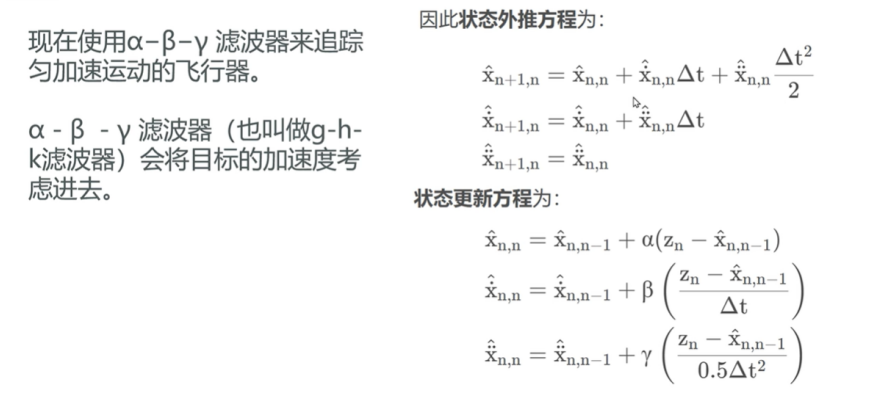
?現在使用α-β-Γ濾波器來追蹤:
根據動力學分析,此時的系統狀態外推方程:
 ?
?
?
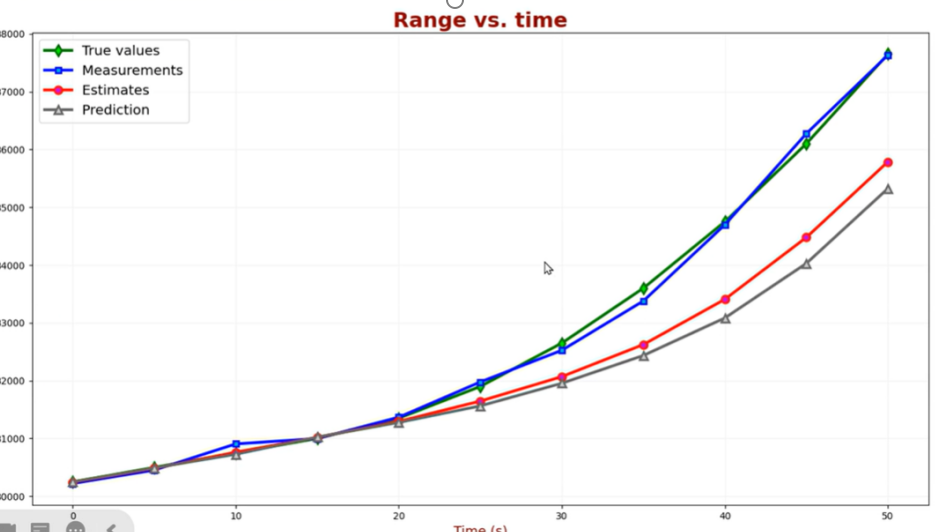
最終得到結果:航程的擬合還是不錯的;
 ?
?
?但是速度和加速度的擬合效果并不好: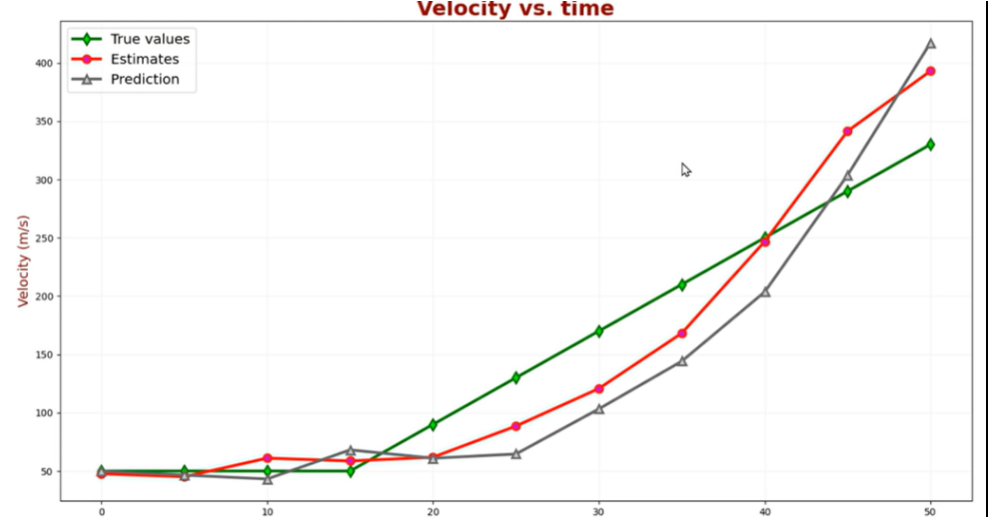
 ?
?
?
 ?卡爾曼濾波器就可以處理動態情況下的問題;
?卡爾曼濾波器就可以處理動態情況下的問題;
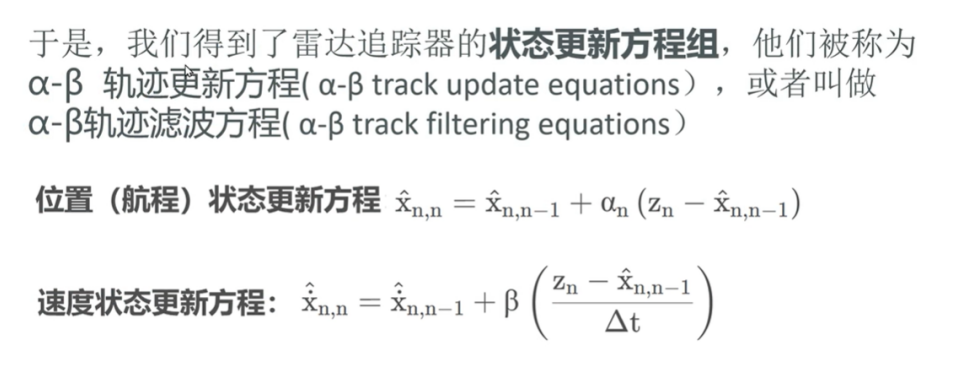
總結:
卡爾曼濾波的第一個方程:通過先驗估計值和對殘差的權重求和得到當前估計值;
卡爾曼濾波的第二個方程:通過動態模型,得到狀態外推方程,去求得先驗估計值;

復制粘貼即可使用,后續更新WebSocket實現聊天功能)


)




 模版)



右值(引用))
)




