汽車線控轉向系統由方向盤總成、轉向執行總成和主控制器(ECU)三個主要部分以及自動防故障系統、電源等輔助系統組成。

線控轉向系統(Steering-By-Wire),取消了方向盤和轉向車輪之間的機械連接部件,徹底擺脫了機械固件的限制,完全由電能來實現轉向。在線控轉向系統中,駕駛員的操縱動作通過傳感器變成電信號,信號經分析處理后,通過導線直接傳遞到執行機構。由于不受機械結構的限制,可以實現理論上的任意轉向意圖,因此線控轉向系統被稱為目前最先進的轉向系統。
線控轉向系統結構
主要由方向盤模塊、主控制器、執行模塊、故障處理系統,電源等部分組成。
其中方向盤模塊、主控制器、執行模塊是線控轉向的3個主要部分,其他模塊屬于輔助部分。
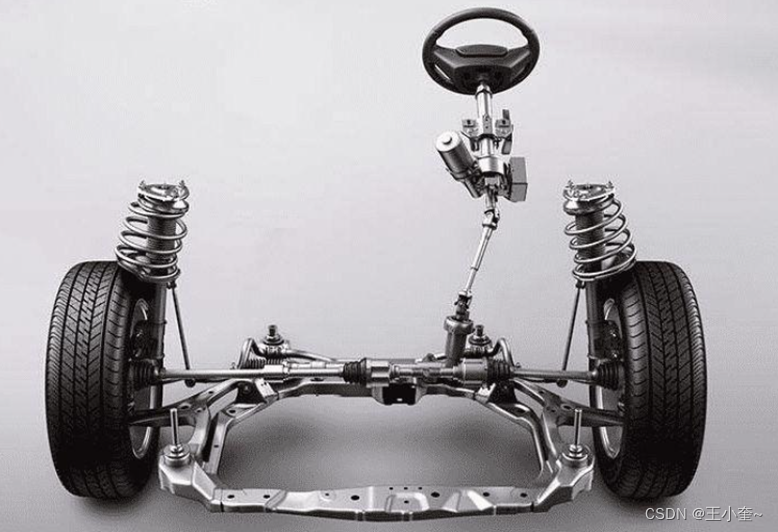
方向盤總成包括方向盤、方向盤轉角傳感器、力矩傳感器、方向盤回正力矩電機。
方向盤總成的主要功能是將駕駛員的轉向意圖轉換成數字信號,并傳遞給主控制器;同時接受主控制器送來的力矩信號,產生方向盤回正力矩,以提供給駕駛員相應的路感信息。方向盤模塊通過測量方向盤的轉角和轉矩,將駕駛員的轉向意圖,轉換成數字信號,并傳遞給主控制器;同時,方向盤模塊接收主控制器反饋的力矩信號,產生方向盤的回正力矩,為駕駛員提供對應的路感。轉向執行總成包括前輪轉角傳感器、轉向執行電機、轉向電機控制器和前輪轉向組件等組成。轉向執行總成的功能是接受主控制器的命令,通過轉向電機控制器控制轉向車輪轉動,實現駕駛員的轉向意圖。
主控制器即ECU,是線控轉向的核心,相當于大腦,它決定了線控轉向的控制效果。它的主要作用是分析和處理各路信號,判斷轉向意圖和汽車的運動狀態,并輸出相應的控制指令。
主控制器一方面對采集到的信號進行分析處理,向轉向執行電機和回正力矩電機發送指令,確保兩臺電機協同工作,從而實現車輛的轉向運動和路感的模擬。另一方面,主控制器保持對駕駛員的操作和車輛的狀態進行實時監控,實現智能化的控制。
主控制器對采集的信號進行分析處理,判別汽車的運動狀態,向方向盤回正力電機和轉向電機發送指令,控制兩個電機的工作,保證各種工況下都具有理想的車輛響應,以減少駕駛員對汽車轉向特性隨車速變化的補償任務,減輕駕駛員負擔。同時控制器還可以對駕駛員的操作指令進行識別,判定在當前狀態下駕駛員的轉向操作是否合理。當汽車處于非穩定狀態或駕駛員發出錯誤指令時,線控轉向系統會將駕駛員錯誤的轉向操作屏蔽,而自動進行穩定控制,使汽車盡快地恢復到穩定狀態。
轉向執行模塊的作用是實現和執行駕駛員的轉向意圖,它由轉向執行電機、轉向電機控制器、車輪轉向組件以及車輪轉角傳感器組成。執行模塊接受主控制器的指令,通過轉向電機及其控制器,控制轉向輪的轉動,實現轉向。
自動防故障系統是線控轉向系的重要模塊,它包括一系列的監控和實施算法,針對不同的故障形式和故障等級做出相應的處理,以求最大限度地保持汽車的正常行駛。作為應用最廣泛的交通工具之一,汽車的安全性是必須首先考慮的因素,是一切研究的基礎,因而故障的自動檢測和自動處理是線控轉向系統最重要的組成系統之一。它采用嚴密的故障檢測和處理邏輯,以更大地提高汽車安全性能。
汽車線控轉向系統的工作原理
用傳感器檢測駕駛員的轉向數據,然后通過數據總線將信號傳遞給車上的ECU,并從轉向控制系統獲得反饋命令;轉向控制系統也從轉向操縱機構獲得駕駛員的轉向指令,并從轉向系統獲得車輪情況,從而指揮整個轉向系統的運動。轉向系統控制車輪轉到需要的角度,并將車輪的轉角和轉動轉矩反饋到系統的其余部分,比如轉向操縱機構,以使駕駛員獲得路感,這種路感的大小可以根據不同的情況由轉向控制系統控制。





)


、函數定義(Function Definition)和函數聲明(Function Declaration))










