原創:項道德(daode3056,daode1212)
新的算法出現,往往能給某些行業與產業帶來革命與突破。為探索機器人運動軌跡與對稱圖像自動生成算法,本人已經通過18種算法的測試,最終,以二進制的XOR運算為最簡便,快速而又豐富。以下是這一算法的一些截圖:
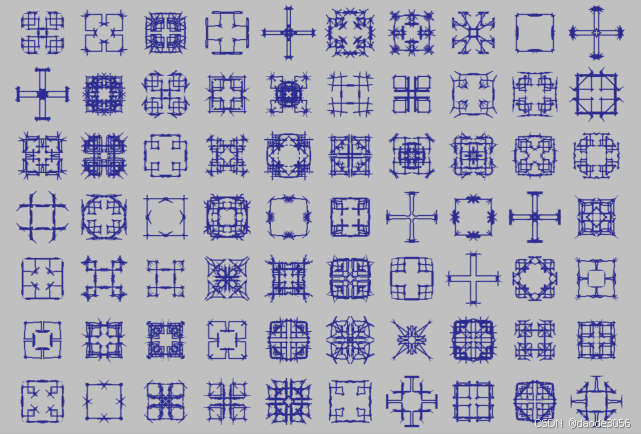
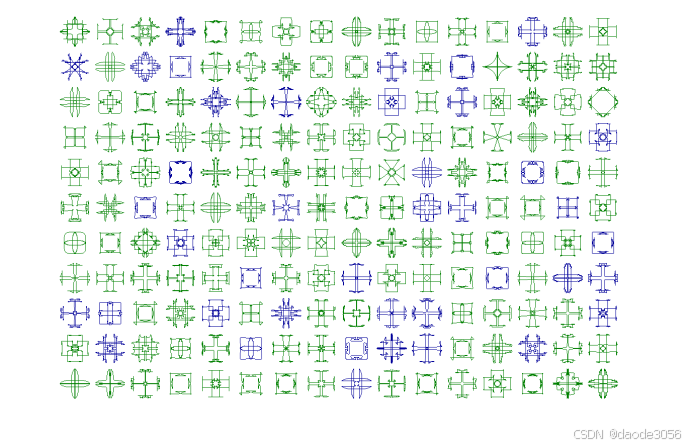
這一算法的出現,它既為機器人運動軌跡設計提供了方便,也為對稱圖案、圖像的設計提供了方便,可廣泛應用于鐳射燈光、印染、紡織、陶瓷、地磚、墻紙、日用品等的圖案設計與選擇。以下是算法的解釋:
一,設計正多邊形,如外接圓半徑R=357,邊數Sn=60;
二,將圓心坐標放在原點(0,0),計算上述多邊形各頂點坐標:{Xi,Yi},i=0,1,2,3,...,60.
三,再取一個新的整數N(N≠R),如取N=431,將第一象限的各坐標按下面的函數計算新值:
? ? ? ? ? ? ? ? ? ? ? ? ? Xi'=XOR(Xi,N),? ?Yi'=XOR(Yi,N),
四,將第一象限的各新坐標{Xi',Yi'},i=0,1,2,3,...,15.按軸對稱方法分別復制到第二,三,四象限。
五,用折線連續連接各新坐標{Xi',Yi'},i=0,1,2,3,...,60.? 如果想要平滑曲線,可通過Bezier插值連接它們,但是點集總的數目應該是3n+1(n是正整數)。
六,當參數R、N相差太大時生成的圖像可能大小也不一致,這時需加上新的算法控制出圖的大小。作者為生成一致大小的圖像是經過最遠距離控制的。
使用C#+OpenTK編程的源代碼與截圖如下:
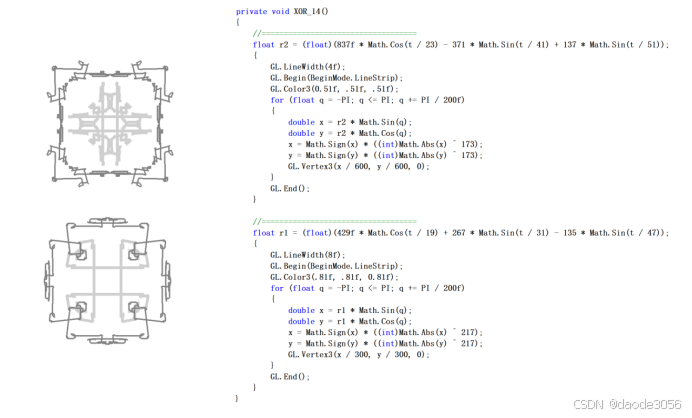
讀者可以自行轉換成所熟悉的語言。
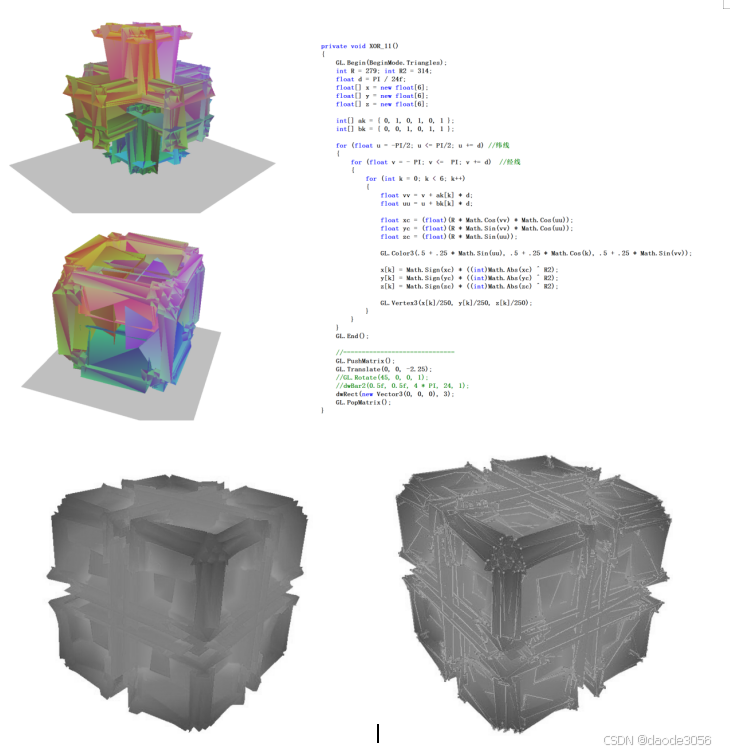
本算法延伸到三維,生成了一些復雜的結構體,類似一種新型的分形算法:
在控制機器人方面,作者自己編寫的六軸關節機器人與SCARA機器人上,用這類算法產生的曲線進行引導,效果如下:
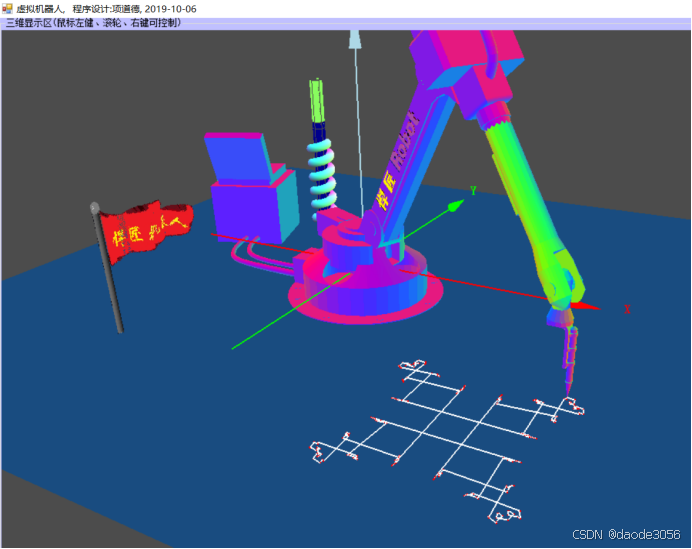
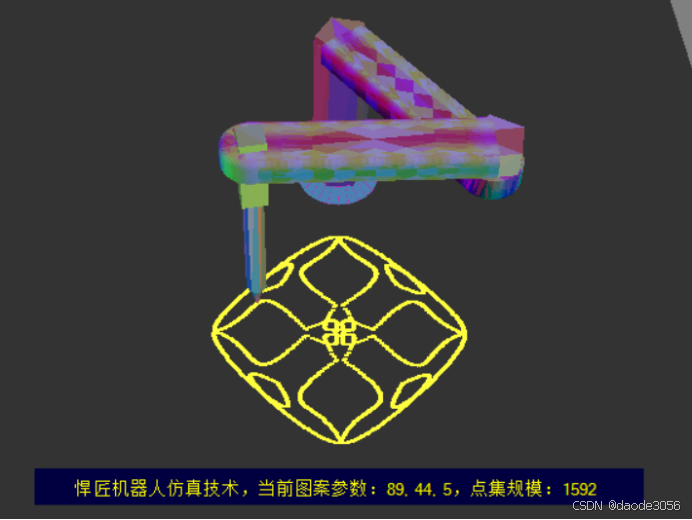
算法已經這樣了,作者在2022年,已經申請了發明專利,歡迎大家繼續研究與拓展。

:Spring Boot + Spring AI Tools + DeepSeek 智能工具平臺(附完整源碼))


















