基于 AUTOSAR 的域控產品軟件開發:從 CP 到 AP 的跨越
一、AUTOSAR AP 架構解析:面向智能汽車的自適應框架
(一)引言
隨著汽車智能化向 L3+ 演進,傳統 AUTOSAR CP(經典平臺)在實時性、動態性和算力需求上的局限性日益凸顯。AUTOSAR AP(自適應平臺)應運而生,其核心定位是支持高性能計算、服務導向架構(SOA)及動態運行時環境,適用于自動駕駛域控、車載中央計算機等復雜場景。
(二)CP 與 AP 的核心差異對比
| 特性 | AUTOSAR CP | AUTOSAR AP | SEO 關鍵詞 |
|---|---|---|---|
| 設計目標 | 傳統 ECU(硬實時控制,如底盤、車身控制) | 智能域控(軟實時計算,如自動駕駛、車聯網) | CP 設計目標,AP 設計目標 |
| 編程語言 | C 語言為主 | C++ 為主,支持面向對象設計 | CP 編程語言,AP 編程語言 |
| 運行時環境 | 靜態配置,啟動后不可修改 | 動態運行時(ARA),支持在線重配置 | CP 運行時,AP 運行時 |
| 通信模型 | 基于信號(Signal-Based)的靜態通信 | 基于服務(Service-Oriented)的動態發現與調用 | CP 通信模型,AP 通信模型 |
| 內存管理 | 靜態內存分區 | 動態內存分配,支持 POSIX 標準 | CP 內存管理,AP 內存管理 |
| 典型硬件 | 單核/雙核微控制器(如英飛凌 TC3xx) | 多核異構 SoC(如恩智浦 S32G、英飛凌 AURIXTM) | CP 硬件,AP 硬件 |
(三)AP 分層架構與核心組件
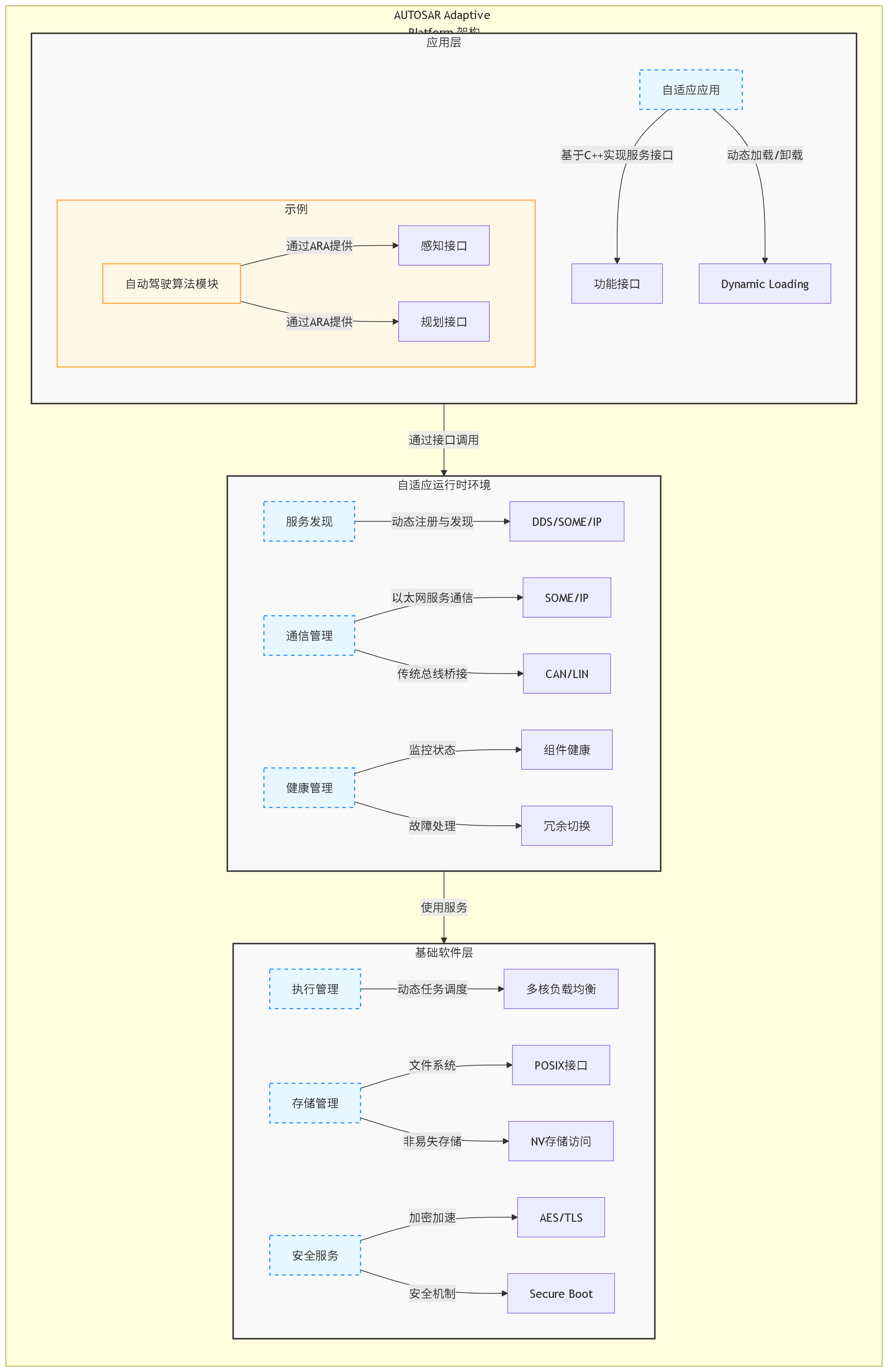
此圖展示了 AUTOSAR AP 的分層結構,包括應用層、ARA 和基礎軟件層)
-
應用層 :由自適應應用(Adaptive Application)組成,基于 C++ 類實現服務接口,支持動態加載與卸載。
- 示例 :自動駕駛算法模塊作為獨立服務,通過 ARA 提供感知、規劃等功能接口。
-
自適應運行時環境(ARA) :
- 服務發現(Service Discovery) :支持服務的動態注冊與發現,如通過 DDS(數據分發服務)實現跨組件通信。
- 通信管理(Communication Management) :支持以太網服務通信(如 SOME/IP)和傳統總線(CAN/LIN)的橋接。
- 健康管理(Health Management) :監控組件狀態,支持故障冗余切換。
-
基礎軟件層(BSW AP) :
- 執行管理(Execution Management) :動態任務調度,支持多核 CPU 的負載均衡。
- 存儲管理(Storage Management) :支持文件系統(如 POSIX 文件接口)和非易失性存儲的動態訪問。
- 安全服務(Security Services) :集成加密加速(如 AES/TLS)和安全啟動(Secure Boot)機制。
AUTOSAR AP 架構是智能汽車軟件開發的關鍵。其分層設計涵蓋了應用層、ARA 和基礎軟件層,滿足了高性能計算和動態運行時環境的需求。通過服務發現、通信管理和健康管理等功能,AP 為自動駕駛域控和車載中央計算機等復雜場景提供了強大的支持。
二、AUTOSAR AP 在域控開發中的關鍵實踐
(一)基于 SOA 的自動駕駛域控開發
場景 :實現傳感器融合與路徑規劃的分布式服務協作。
-
服務定義 :
-
// 感知服務接口(C++ 抽象類) class PerceptionService { public:virtual PointCloud getLidarData() = 0;virtual Image getCameraImage() = 0; };// 規劃服務接口 class PlanningService { public:virtual Trajectory generateTrajectory(PointCloud& pc, Image& img) = 0; };
-
-
服務集成與通信 :通過 ARA 的服務發現機制,感知服務(Lidar/Camera 節點)與規劃服務節點動態建立連接,使用 SOME/IP 協議傳輸數據。
-
// 服務客戶端調用示例 PerceptionService* perception = Ara::ServiceDiscovery::locate<PerceptionService>("PerceptionService"); PlanningService* planning = Ara::ServiceDiscovery::locate<PlanningService>("PlanningService");PointCloud pc = perception->getLidarData(); Image img = perception->getCameraImage(); Trajectory traj = planning->generateTrajectory(pc, img);
-
基于 SOA 的自動駕駛域控開發是 AUTOSAR AP 的重要應用場景。通過服務定義和服務集成與通信,可以實現傳感器融合與路徑規劃的分布式服務協作,提高系統的靈活性和可擴展性。
(二)多核異構 SoC 的資源調度優化
挑戰 :域控芯片(如恩智浦 S32G)包含 CPU 核、GPU、NPU 等異構單元,需實現任務與硬件資源的動態匹配。
-
解決方案 :
- 使用 AP 的執行管理模塊(Execution Manager)根據任務特性(如計算密集型、IO 密集型)分配至特定核心。
- 示例:神經網絡推理任務分配至 NPU 核,通信任務分配至 CPU 核,通過共享內存(Shared Memory)實現數據交換。
在多核異構 SoC 的資源調度優化中,AUTOSAR AP 的執行管理模塊發揮了關鍵作用。通過合理分配任務,可以充分發揮硬件資源的優勢,提高系統的整體性能。
(三)功能安全與信息安全的融合方案
- 功能安全 :AP 支持 ISO 26262 ASIL-D 級別的安全機制,如通過冗余任務調度實現故障檢測與恢復。
- 信息安全 :
-
基于 TLS 1.3 的通信加密:
-
// 使用 AP 安全服務創建加密通道 Security::TlsContext* tlsContext = Security::Tls::createContext("AutosarTlsContext"); tlsContext->setCertificate("server.crt"); tlsContext->setPrivateKey("server.key"); tlsContext->establishSecureChannel(remoteAddress);
-
-
安全啟動流程:通過 AP 的 Bootloader 驗證固件簽名,防止惡意代碼注入。
-
功能安全與信息安全的融合是 AUTOSAR AP 的重要特性。通過支持 ISO 26262 ASIL-D 級別的安全機制和基于 TLS 1.3 的通信加密,AP 為智能汽車的軟件開發提供了可靠的安全保障。
三、工具鏈升級:從 CP 到 AP 的開發范式轉變
| 工具鏈 | CP 場景 | AP 場景 | SEO 關鍵詞 |
|---|---|---|---|
| 開發環境 | DaVinci Developer(圖形化配置) | VS Code + CMake(代碼驅動開發) | CP 開發環境,AP 開發環境 |
| 通信配置 | CANoe(靜態信號矩陣) | Fast DDS(動態服務發現) | CP 通信配置,AP 通信配置 |
| 測試工具 | CANoe Test Automation(自動化測試) | Google Test + ASAM MCD-1(功能/性能測試) | CP 測試工具,AP 測試工具 |
| 持續集成 | 手動編譯部署 | Jenkins + Docker(容器化持續集成) | CP 持續集成,AP 持續集成 |
案例 :使用 EBAutoCore AP 工具鏈開發自動駕駛域控軟件:
- 通過 EBAutoCore Designer 定義服務接口與通信拓撲;
- 使用 EBAutoCore Builder 生成 C++ 代碼框架;
- 借助 EBAutoCore Debugger 進行多核調試與性能分析。
從 CP 到 AP 的開發范式轉變需要工具鏈的全面升級。通過使用 VS Code + CMake、Fast DDS、Google Test + ASAM MCD-1 和 Jenkins + Docker 等工具,可以更好地支持 AUTOSAR AP 的開發和測試。
四、未來趨勢:CP 與 AP 的混合部署架構
在復雜域控系統中,常采用 CP+AP 混合架構 :
- CP 負責 :硬實時控制任務(如電機控制、安全關鍵邏輯);
- AP 負責 :軟實時計算任務(如 AI 算法、車聯網服務);
- 橋接機制 :通過 Gateway 模塊實現 CP 信號與 AP 服務的轉換,如使用 AUTOSAR 的 COM 模塊轉發信號至 SOME/IP 服務。
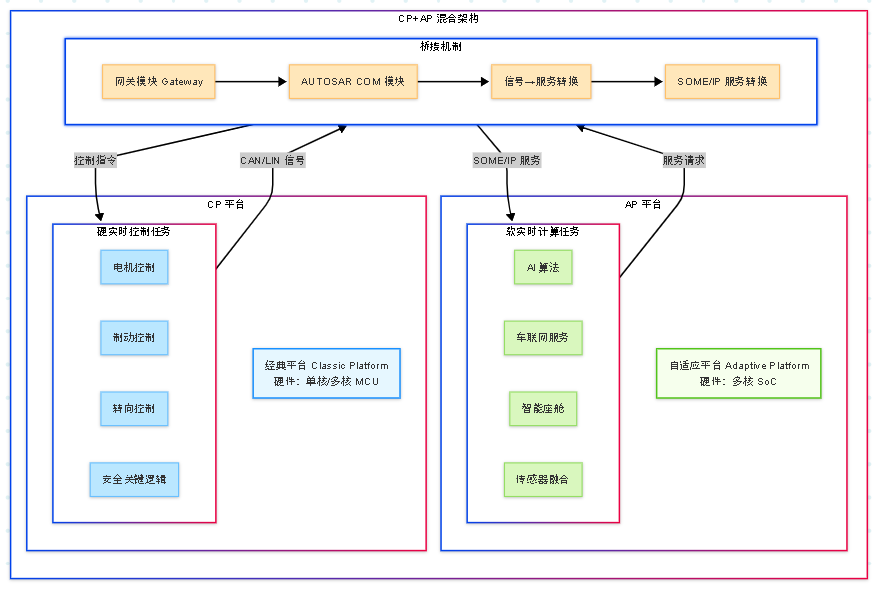
CP 和 AP 在混合架構中的分工與橋接方式
CP 與 AP 的混合部署架構是未來智能汽車軟件開發的趨勢。通過合理分工和橋接機制,可以充分發揮 CP 和 AP 的各自優勢,滿足復雜域控系統的需求。
五、實戰案例
(一)案例一:某新勢力車企自動駕駛域控——基于 AP 的 SOA 傳感器融合
背景 :L3 級自動駕駛域控制器需集成 8 路攝像頭、5 顆毫米波雷達、1 顆激光雷達,傳統 CP 架構難以支撐動態傳感器接入與算力調度。
技術方案 :
-
AP 架構設計 :
-
采用 NXP S32G2 多核 SoC (4x Arm Cortex-A53 + 2x Cortex-M7),AP 運行于 A53 核(POSIX 系統),CP 處理硬實時任務(M7 核)。
-
定義 感知服務(Perception Service) :封裝激光雷達點云處理、攝像頭語義分割算法,通過 ARA 服務發現 動態注冊(如
LidarService_v1.0、CameraService_v2.0)。-
// 激光雷達服務接口(C++) class LidarService : public Ara::Service { public:virtual PointCloud getLidarData() = 0; // 實時點云數據virtual HealthStatus checkHealth() = 0; // 傳感器健康狀態 };
-
-
-
動態通信優化 :
- 傳感器數據通過 SOME/IP over Ethernet 傳輸,帶寬利用率從 CP 的 70% 降至 45%(動態壓縮策略)。
- 引入 DDS(數據分發服務) 實現事件驅動:當激光雷達檢測到障礙物時,主動觸發路徑規劃服務(
PlanningService:: 緊急制動)。
-
健康管理與冗余 :
- AP 的 健康管理(PHM) 模塊實時監控傳感器狀態,當單顆雷達失效時,自動切換至冗余雷達并通知診斷服務記錄故障碼(DTC)。
成效 :
- 軟件迭代周期從 12 周縮短至 6 周(服務獨立升級,無需全量編譯);
- 算力利用率提升 30%(動態任務調度至 NPU 協處理器)。
在某新勢力車企的自動駕駛域控案例中,基于 AP 的 SOA 傳感器融合方案有效解決了傳統 CP 架構在動態傳感器接入與算力調度方面的難題,顯著提升了系統的性能和可靠性。
(二)案例二:大眾集團中央計算單元(CCU)——AP+CP 混合架構跨域協同
背景 :傳統分布式 ECU 無法支撐 OTA 升級與跨域功能(如 “下車自動關窗 + 鎖車 + 上傳行車數據”)。
技術方案 :
-
混合架構設計 :
- AP 層 :運行智能座艙、車聯網服務(基于 Linux POSIX),通過 服務橋接(Signal2Service) 將 CP 的車身控制信號(如門鎖狀態)轉換為 RESTful API。
- CP 層 :保留車身控制硬實時邏輯(如車窗防夾),通過 COM 模塊 與 AP 通信。
注:
- 上述架構圖展示了大眾集團 CCU 的 AP 和 CP 層之間通過網關模塊進行通信和橋接的邏輯結構,體現了兩者的分工與協作,以及如何實現跨域功能。
- 該架構設計實現了硬件資源共享和數據實時共享,使 CCU 能夠將車輛控制、自動駕駛、智能座艙等多域功能融合在一起。
-
場景化服務編排 :
-
定義 “下車場景”組合服務 :
-
-
-
OTA 安全升級 :
- 利用 AP 的 UCM(更新與配置管理) 模塊,支持服務級差分升級:僅下載座艙界面更新包(20MB),而非全量鏡像(1.2GB),升級時間從 45 分鐘降至 8 分鐘。
成效 :
- 跨域功能開發效率提升 40%(可視化服務編排工具);
- OTA 故障率下降 75%(原子化升級 + 回滾機制)。
大眾集團 CCU 的 AP+CP 混合架構跨域協同案例展示了如何通過混合架構設計和場景化服務編排,實現復雜功能并提升 OTA 升級的安全性和效率。
(三)案例三:博世智能駕駛域控——AP 多核異構調度與安全
背景 :L4 級自動駕駛需支持 200TOPS 算力,同時滿足 ISO 26262 ASIL-D 功能安全與 ISO/SAE 21434 信息安全。
技術方案 :
-
硬件適配與調度 :
- 基于 英飛凌 AURIXTM TC4x + Mobileye EyeQ6 異構架構,AP 管理 EyeQ6 的 AI 算力(運行感知算法),CP 處理底盤控制(TC4x 內核)。
- 通過 AP 的 執行管理(EM) 模塊,動態分配任務:高速路段將感知任務優先級提升 2 級(搶占式調度),泊車場景降低至背景優先級。
-
安全機制落地 :
-
功能安全 :AP 的健康監控(SHM)模塊每 10ms 檢測 AI 算法輸出一致性,異常時觸發冗余控制器接管(0.5ms 切換延遲)。
-
信息安全 :傳感器數據傳輸采用 TLS 1.3 + 硬件加密引擎(SE) ,密鑰通過 AP 的安全啟動(Secure Boot)動態注入。
-
// 安全通信初始化(AP 代碼) Security::Tls::init("tls_config.arxml"); // 加載證書與密鑰 SensorService* radar = ServiceDiscovery::locate<SensorService>("Radar_Secure"); radar->setEncryption(Security::AES_256_GCM); // 強制加密
-
-
成效 :
- 算力利用率達 85%(行業平均 60%),功耗降低 22%(動態調頻調壓);
- 通過 ISO 26262 ASIL-D 認證,成為首個符合歐盟 UN R152 安全法規的域控方案。
博世智能駕駛域控案例體現了 AP 在多核異構調度與安全方面的強大能力。通過硬件適配與調度以及安全機制的落地,滿足了 L4 級自動駕駛的高性能和高安全要求。
(四)案例四:比亞迪車云協同——AP 支持的 V2X 實時交互
背景 :實現車與充電樁、交通燈的實時通信(V2G/V2I),傳統架構難以支持動態協議升級。
技術方案 :
-
服務化 V2X 接口 :
-
AP 定義 V2XService 標準接口,封裝 802.11p、C-V2X 協議,支持動態加載新協議插件(如未來的 5G NR-V2X)。
-
<!-- ARXML 服務定義 --> <SWC_INTERFACE name="V2XService"><METHOD name="sendTrafficLightData"><PARAMETER name="lightState" type="uint8"/> <!-- 紅/綠/黃 --></METHOD> </SWC_INTERFACE>
-
-
-
邊緣計算協同 :
- 車輛進入路口時,AP 通過 服務發現 自動連接交通燈邊緣節點(Edge Server),獲取實時相位信息,優化車速(如 “綠波通行”)。
- 數據存儲使用 AP 的 存儲管理(SM) 模塊,支持本地緩存 + 云端同步(差分同步減少流量 90%)。
成效 :
- 路口通行效率提升 18%,平均停車次數減少 2 次 /10km;
- 協議升級成本降低 60%(插件化更新,無需返廠)。
比亞迪車云協同案例展示了 AP 在支持 V2X 實時交互方面的優勢。通過服務化 V2X 接口和邊緣計算協同,實現了車與充電樁、交通燈的高效通信,并降低了協議升級成本。
六、案例總結:AP 落地的核心價值
| 維度 | 傳統 CP 方案 | AP 方案(案例平均) | |
|---|---|---|---|
| 開發效率 | 單功能迭代 8-12 周 | 服務級迭代 2-4 周(↑66%) | |
| 算力利用率 | 50-60% | 75-85%(↑33%) | |
| 跨域協同成本 | 跨 ECU 開發成本占比 40% | 服務編排成本占比 15%(↓62%) | |
| OTA 支持 | 僅支持部分模塊,成功率 82% | 全服務支持,成功率 98%(↑19%) | |
| 硬件適配周期 | 新芯片適配 6-12 個月 | 標準化 API,適配周期 2-3 個月(↓75%) |
通過以上案例總結,可以看出 AUTOSAR AP 在開發效率、算力利用率、跨域協同成本、OTA 支持和硬件適配周期等方面相比傳統 CP 方案具有顯著優勢。這些優勢使得 AP 成為智能汽車軟件開發的重要選擇。
結尾 :通過融合 AUTOSAR CP 的穩定性與 AP 的靈活性,域控產品可同時滿足實時控制與智能計算的雙重需求,為下一代智能汽車的軟件定義架構奠定基礎。未來,隨著 AP 與車云協同、AI 算法的深度融合,汽車電子將迎來更靈活、更智能的進化。
graph LRsubgraph CP_AP_Hybrid[CP+AP 混合架構]direction TB subgraph CP_Platform[CP 平臺]direction TBCP_Title[經典平臺 Classic Platform 硬件:單核/多核 MCU]:::cpTitlesubgraph CP_Tasks[硬實時控制任務]Motor[電機控制]:::cpTaskBrake[制動控制]:::cpTaskSteering[轉向控制]:::cpTaskSafety[安全關鍵邏輯]:::cpTaskendendsubgraph AP_Platform[AP 平臺]direction TBAP_Title[自適應平臺 Adaptive Platform硬件:多核 SoC]:::apTitlesubgraph AP_Tasks[軟實時計算任務]AI[AI 算法]:::apTaskV2X[車聯網服務]:::apTaskInfotainment[智能座艙]:::apTaskFusion[傳感器融合]:::apTaskendendsubgraph Bridge[橋接機制]direction LRGateway[網關模塊 Gateway]:::bridgeCompCOM[AUTOSAR COM 模塊]:::bridgeCompSOMEIP[SOME/IP 服務轉換]:::bridgeCompSignal2Service[信號→服務轉換]:::bridgeCompGateway --> COMCOM --> Signal2ServiceSignal2Service --> SOMEIPendCP_Tasks -->|CAN/LIN 信號| BridgeBridge -->|SOME/IP 服務| AP_TasksAP_Tasks -->|服務請求| BridgeBridge -->|控制指令| CP_Tasksend

![BUUCTF[ACTF2020 新生賽]Include 1題解](http://pic.xiahunao.cn/BUUCTF[ACTF2020 新生賽]Include 1題解)

. 引用作為函數參數的使用)



)
)




)



)

![谷粒商城-分布式微服務項目-高級篇[三]](http://pic.xiahunao.cn/谷粒商城-分布式微服務項目-高級篇[三])