一、核心定義與基礎概念
1. 目標追蹤的定義
- 定義:在視頻序列或連續圖像中,對一個或多個感興趣目標(如人、車輛、物體等)的位置、運動軌跡進行持續估計的過程。
- 核心任務:跨幀關聯目標,解決“同一目標在不同幀中的對應關系”。
- 核心輸入:視頻序列(含幀圖像、時間戳)、初始幀目標位置(單目標)或檢測結果(多目標)。
2. 核心分類
按目標數量劃分:
- 單目標追蹤(Single Object Tracking, SOT):追蹤單個已知初始位置的目標,重點處理外觀變化、遮擋、尺度變化等。
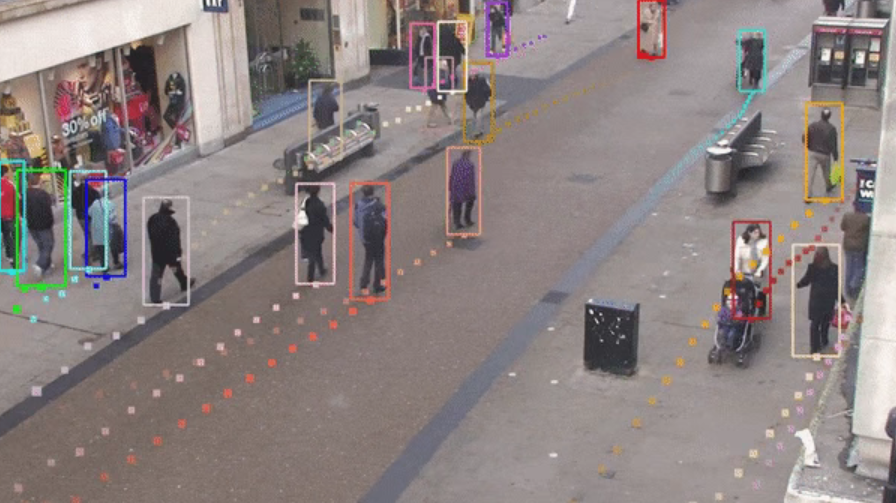
典型場景:無人機跟拍、手術機器人目標追蹤。 - 多目標追蹤(Multi-Object Tracking, MOT):同時追蹤多個未知初始關聯的目標,核心是跨幀數據關聯(Data Association)。
典型場景:安防監控、自動駕駛行人追蹤。
按技術路線劃分:
- 基于檢測的追蹤(Tracking-by-Detection, TBD):依賴目標檢測結果,通過關聯相鄰幀檢測框實現追蹤(主流方法)。
- 端到端追蹤(End-to-End Tracking):無需顯式檢測,直接通過網絡學習目標在序列中的時空關聯(如單目標中的孿生網絡)。
二、單目標追蹤(SOT)核心技術
1. 經典算法(2010年前)
(1)生成式方法(Generative Models)
- 核心思想:構建目標表觀模型,在后續幀中搜索最匹配區域。
- 代表算法:
- Mean Shift:基于顏色直方圖的局部密度估計,迭代搜索目標中心(實時性好,但易受遮擋影響)。
- 粒子濾波(Particle Filter):通過隨機采樣粒子表示目標狀態分布,適用于非線性運動(計算復雜度高)。
(2)判別式方法(Discriminative Models)
- 核心思想:將追蹤視為二分類問題(目標 vs 背景),學習區分目標與周圍環境的特征。
- 代表算法:
- 相關濾波(Correlation Filter, CF)系列:
- MOSSE:基于快速傅里葉變換(FFT),實現亞像素級定位(首個實時追蹤算法,300+ FPS)。
- KCF(Kernelized CF):引入核函數和循環矩陣,利用密集采樣提升精度(2015年主流算法)。
- DSST/Staple:加入尺度估計和顏色空間特征(CN特征),解決尺度變化問題。
- 深度學習早期方法:
- MDNet:首個端到端深度網絡,在線學習目標特定特征(應對外觀劇變,但計算量大)。
- 相關濾波(Correlation Filter, CF)系列:
2. 深度學習時代(2016年至今)
(1)孿生網絡(Siamese Network)
- 核心思想:通過孿生結構提取模板(初始幀目標)和搜索區域(當前幀候選區域)的特征,計算相似度匹配目標。
- 代表算法:
- SiameseFC(2016):首次將孿生網絡引入追蹤,使用AlexNet提取特征,實現離線訓練+在線端到端匹配(開啟高效追蹤范式)。
- SiamRPN(2018):引入區域建議網絡(RPN),預測目標邊界框,提升定位精度(首次超越檢測追蹤方法)。
- SiamCAR(2020):基于中心點回歸,避免錨框設計,提升尺度變化魯棒性。
- 優勢:離線訓練無需在線學習,實時性強(50-100 FPS),適合資源受限場景(如無人機)。
(2)基于檢測的單目標追蹤
- 核心思想:結合目標檢測和運動模型,逐幀定位目標。
- 代表算法:
- ATOM(2019):分離目標分類和邊界框回歸,使用IoUNet優化定位精度。
- TransT(2021):首個引入Transformer的追蹤算法,建模目標全局上下文關系,解決復雜遮擋。
(3)在線學習與適應
- 關鍵問題:目標外觀隨時間變化(如光照、姿態),需在線更新模型。
- 解決方案:
- 增量學習:定期用當前幀目標更新模板(如DaSiamRPN)。
- 元學習(Meta-Learning):預訓練模型快速適應新目標(如TAML)。
3. 關鍵技術點
(1)目標表示
- 外觀特征:
- 手工特征:HOG、CN(顏色名稱)、LBP(適用于早期輕量模型)。
- 深度特征:ResNet、Swin Transformer(提取語義和空間細節,抗遮擋能力強)。
- 多模態融合:結合RGB、紅外、深度信息(提升夜間或復雜光照追蹤效果)。
(2)尺度與姿態變化
- 尺度估計:構建多尺度金字塔(如DSST)或回歸尺度因子(SiamRPN++)。
- 姿態魯棒性:引入形變建模(如形變卷積)或注意力機制(聚焦目標關鍵部位)。
(3)遮擋處理
- 短期遮擋:依賴運動模型預測位置(如卡爾曼濾波),結合表觀模型恢復(如相關濾波保留歷史模板)。
- 長期遮擋:目標消失后重新檢測(需與多目標追蹤的重識別結合,如引入Re-ID特征)。
三、多目標追蹤(MOT)核心技術
1. 經典框架:檢測+數據關聯
(1)目標檢測前置
- 依賴:YOLO、Faster R-CNN、DETR等檢測器提供各幀檢測框(含類別、置信度、位置)。
- 挑戰:檢測漏檢、誤檢直接影響追蹤精度(需結合追蹤結果反向優化檢測,如Tracklet拼接)。
(2)數據關聯(核心模塊)
- 任務:將當前幀檢測框與歷史軌跡(Track)匹配,解決“同一目標跨幀對應”。
- 方法分類:
- 運動關聯(短期匹配):
- 卡爾曼濾波(Kalman Filter):建模目標運動狀態(位置、速度),預測下一幀位置,計算檢測框與預測框的IoU相似度(如SORT算法)。
- 匈牙利算法(Hungarian Algorithm):求解二分圖匹配最優解,處理多對多匹配問題(復雜度O(n3),n為目標數)。
- 外觀關聯(長期匹配):
- Re-ID特征:提取目標外觀嵌入(如ResNet+Triplet Loss訓練),計算余弦相似度(解決長時間遮擋后的重識別,如DeepSORT)。
- 時空特征融合:結合運動距離(如馬氏距離)和外觀距離,構建聯合相似度矩陣(主流方法)。
- 運動關聯(短期匹配):
(3)軌跡管理
- 軌跡初始化:新檢測框創建新軌跡(需設置置信度閾值避免噪聲)。
- 軌跡終止:連續N幀未匹配則終止(N=3-5,平衡漏檢和虛警)。
- 軌跡碎片化處理:通過全局軌跡優化(如圖優化、動態規劃)連接斷裂軌跡(如TrackEval中的MOTA指標優化)。
2. 主流算法演進
(1)傳統方法(2015年前)
- SORT(2016):僅用IoU和匈牙利算法做短期匹配,實時性強(200+ FPS),但長期遮擋易丟失。
- DeepSORT(2017):加入Re-ID外觀特征,提升長期追蹤精度(MOTA提升10%+),成為多目標追蹤基準框架。
(2)端到端深度學習方法(2018年后)
- JDE(2019):首個聯合檢測與追蹤(Joint Detection and Embedding)模型,共享檢測和Re-ID特征提取網絡,提升效率(50 FPS,適合實時場景)。
- CenterTrack(2020):基于中心點檢測(CenterNet),無需錨框,直接回歸目標中心點和尺寸,簡化關聯計算(對密集目標更魯棒)。
- TransTrack(2021):引入Transformer建模跨幀目標交互,捕捉長程依賴關系(如多目標遮擋時的全局關聯)。
(3)無檢測追蹤(新興方向)
- 基于分割的追蹤(Tracking-by-Segmentation, TbS):結合實例分割(如Mask R-CNN),解決外觀相似目標區分問題(如多行人追蹤中的衣物顏色相近場景)。
- 自監督學習:利用無標簽視頻數據預訓練關聯模型(降低對人工標注的依賴,如MOTR3D)。
3. 關鍵技術點
(1)復雜場景處理
- 密集目標:高重疊率下的ID切換(需增強Re-ID特征判別力,如引入局部特征聚合)。
- 相似目標:利用運動模式差異(如行人步態、車輛行駛軌跡)輔助關聯。
- 跨攝像頭追蹤(Multi-Camera MOT):解決不同視角、光照下的目標匹配,需額外校準相機參數和空間映射。
(2)評價指標
- 單目標追蹤:
- 成功率(Success Rate):預測框與真值IoU≥0.5的幀占比。
- 精度(Precision Rate):預測中心與真值中心的平均像素距離。
- 多目標追蹤:
- MOTA(Multiple Object Tracking Accuracy):綜合考慮漏檢、誤檢、ID切換,范圍0-100%(越高越好)。
- IDF1(ID F1-Score):追蹤ID與真值的匹配準確率,反映ID穩定性。
四、共性關鍵技術
1. 運動建模
- 線性模型:卡爾曼濾波(適用于勻速/勻加速運動,如公路車輛追蹤)。
- 非線性模型:粒子濾波、交互式多模型(IMM,適應突然變向,如行人隨機運動)。
- 深度學習建模:通過LSTM、圖神經網絡(GNN)學習目標運動規律(捕捉復雜交互,如人群中的相互遮擋)。
2. 實時性優化
- 模型輕量化:使用MobileNet、GhostNet替代ResNet,減少計算量(如YOLO-Track在嵌入式設備上達100 FPS)。
- 推理加速:模型量化(FP32→INT8)、剪枝、神經架構搜索(NAS)。
- 并行計算:利用GPU/TPU的并行處理能力,優化數據關聯算法(如批處理匈牙利算法)。
3. 長期追蹤與魯棒性
- 目標重檢測:當軌跡丟失時,觸發全局搜索(如在全圖重新檢測目標類別,結合Re-ID恢復軌跡)。
- 記憶機制:存儲目標歷史外觀模板(如最近5幀特征),應對外觀突變(如換衣服、戴口罩)。
五、典型應用場景
1. 安防監控
- 需求:多目標實時追蹤、跨攝像頭軌跡關聯、異常行為檢測(如徘徊、聚集)。
- 挑戰:復雜光照(夜晚紅外追蹤)、低分辨率(需超分辨率重建輔助)。
2. 自動駕駛
- 需求:車輛、行人、非機動車實時追蹤,提供決策輸入(如碰撞預警)。
- 技術:融合雷達點云與視覺數據(解決遮擋和低光照問題),低延遲模型(≤50ms延遲)。
3. 無人機與機器人
- 需求:單目標精準跟拍(如無人機跟拍運動員)、多目標避障(機器人集群協作)。
- 關鍵:輕量化模型(適應無人機有限算力),抗運動模糊(無人機高速飛行時圖像模糊)。
4. 體育與娛樂
- 應用:運動員動作分析(軌跡追蹤輔助戰術評估)、虛擬主播追蹤(實時驅動3D模型)。
- 技術:高精度姿態估計與軌跡關聯(如OpenPose+DeepSORT)。
六、當前挑戰與未來方向
1. 核心挑戰
- 復雜遮擋:密集場景下目標長時間遮擋導致ID頻繁切換(如早高峰十字路口)。
- 外觀劇變:目標視角、光照、尺度快速變化(如自動駕駛中前車突然變道近景)。
- 計算資源限制:嵌入式設備(如手機、無人機)難以運行高算力模型。
- 跨模態對齊:多傳感器(視覺、雷達、激光)數據時空同步誤差(影響融合精度)。
2. 前沿研究方向
(1)模型架構創新
- Transformer與GNN:建模目標全局依賴關系(如TransTrack處理多目標交互)。
- 自監督/半監督學習:利用海量無標簽視頻數據預訓練(減少人工標注成本,如MoCo追蹤模型)。
(2)多技術融合
- 多模態融合:視覺+IMU+UWB定位,提升復雜環境魯棒性(如AR設備目標追蹤)。
- 檢測-追蹤-分割一體化:端到端模型同時輸出檢測框、軌跡ID、分割掩碼(如TrackFormer)。
(3)輕量化與實時性
- 神經架構搜索(NAS):自動設計適合移動端的追蹤模型(如MobileSiamNet)。
- 在線自適應:動態調整模型復雜度(如根據目標數量切換輕量/高精度模式)。
(4)跨領域拓展
- 3D目標追蹤:自動駕駛中的3D空間軌跡預測(需處理點云與圖像融合,如CenterPoint)。
- 長視頻追蹤:跨數小時視頻的目標軌跡拼接(需解決長時間外觀變化和跨攝像頭關聯)。
七、總結
目標追蹤是計算機視覺的核心任務,從單目標的精準定位到多目標的全局關聯,技術路線涵蓋傳統算法到深度學習,應用場景滲透安防、交通、機器人等領域。未來發展將聚焦于魯棒性、實時性、多模態融合,以及與3D視覺、大模型的結合,推動從“追蹤目標”到“理解目標行為”的跨越。


如何在Linux 系統中下載、安裝)



)





:Spring Boot 3 集成 MyBatis-Flex 配置 Druid 連接池指南)


)



