在工業控制領域,PID?控制憑借結構簡單、穩定性好、工作可靠等優點被廣泛應用。然而,傳統固定參數的?PID?控制在面對復雜多變的工況時,控制效果往往難以達到最優。基于?LabVIEW?實現?PID?控制根據情況選擇參數(即參數自適應調整),能夠顯著提升系統性能。下面從工作原理、實現方式和實際應用等方面深入介紹這一知識點。
?
一、工作原理
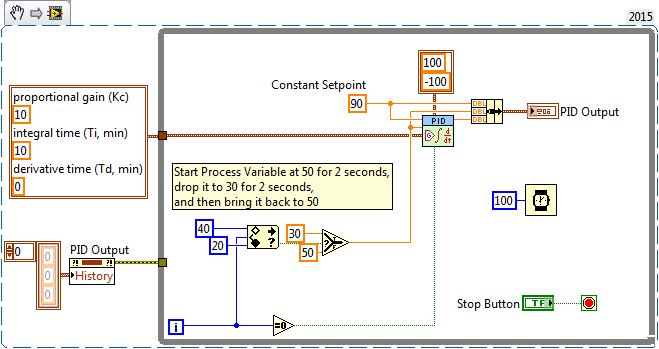
PID?控制根據設定值(Setpoint)與實際測量值(Process?Variable)之間的偏差(Error)來計算控制量。基本公式為:\(u(t)=K_p?\cdot?e(t)+K_i?\int_{0}^{t}?e(\tau)d\tau?+?K_d?\frac{de(t)}{dt}\)其中,\(u(t)\)是控制量,\(K_p\)為比例增益,\(K_i\)為積分增益(\(K_i?=?\frac{K_p}{T_i}\),\(T_i\)是積分時間),\(K_d\)為微分增益(\(K_d?=?K_p?\cdot?T_d\),\(T_d\)是微分時間),\(e(t)\)是當前時刻的偏差。
在實際應用中,被控對象的特性可能隨時間、環境等因素變化。例如,在溫度控制系統中,加熱元件的效率可能會因老化而改變,環境散熱條件也可能不同。此時,固定的?PID?參數無法滿足控制需求。基于情況選擇參數的核心思想是,根據系統當前的運行狀態(如偏差大小、偏差變化率等),動態調整\(K_p\)、\(K_i\)、\(K_d\)的值,使系統始終保持良好的控制性能。
二、基于?LabVIEW?的實現方式
(一)利用模糊邏輯調整?PID?參數
-
模糊化:在?LabVIEW?中,首先將系統的偏差(Error)和偏差變化率(Change?in?Error)作為模糊邏輯的輸入變量。將這些精確的數值按照一定的隸屬度函數映射到模糊集合中,例如?“負大”“負小”“零”“正小”“正大”?等。LabVIEW?的?“模糊邏輯”?工具包提供了豐富的函數用于創建和操作隸屬度函數。
-
模糊規則制定:根據經驗和對被控對象的理解,制定模糊規則。例如,如果偏差為?“正大”?且偏差變化率為?“正小”,則適當增大\(K_p\)以加快響應速度,同時減小\(K_i\)避免積分飽和,\(K_d\)可根據具體情況微調。這些規則以?“IF?-?THEN”?的形式存儲在模糊規則庫中。
-
模糊推理與解模糊:通過模糊推理機制,根據輸入的模糊變量和模糊規則,得出模糊的輸出結果,即調整后的?PID?參數的模糊值。然后,利用解模糊方法(如重心法)將模糊輸出轉換為精確的數值,用于更新?PID?控制器的參數。
(二)基于模型參考自適應控制(MRAC)調整?PID?參數
-
參考模型構建:在?LabVIEW?中搭建一個理想的參考模型,該模型代表期望的系統輸出響應。例如,對于一個電機速度控制系統,參考模型可以設定為在特定時間內達到目標速度且無超調的理想響應模型。
-
參數調整算法:將實際系統的輸出與參考模型的輸出進行比較,計算兩者之間的誤差。根據這個誤差,采用特定的自適應算法(如?Lyapunov?穩定性理論設計的算法)來調整?PID?參數,使得實際系統的輸出盡可能接近參考模型的輸出。在?LabVIEW?中,可以利用數學運算函數和反饋控制結構實現這些算法。
三、實際應用案例
(一)溫度控制系統
-
硬件配置:硬件選用歐姆龍溫度傳感器采集溫度信號,通過?NI?-?DAQ?數據采集卡將模擬信號轉換為數字信號輸入到?LabVIEW?中。控制加熱設備采用固態繼電器,由?LabVIEW?輸出的控制信號通過繼電器驅動加熱絲工作。
-
軟件實現:在?LabVIEW?程序中,利用模糊邏輯調整?PID?參數。當溫度偏差較大時,增大比例增益\(K_p\),快速提升加熱功率;隨著溫度接近設定值,減小\(K_p\),增大積分增益\(K_i\)消除靜態誤差。如果溫度變化過快(偏差變化率大),適當增大微分增益\(K_d\)抑制超調。通過這種方式,系統能夠在不同的環境溫度和加熱需求下,快速、穩定地將溫度控制在設定值附近。
(二)電機速度控制系統
-
硬件配置:采用編碼器測量電機轉速,將轉速信號反饋給?LabVIEW。通過西門子?SINAMICS?變頻器控制電機的輸入頻率,從而調節電機轉速。
-
軟件實現:運用模型參考自適應控制調整?PID?參數。參考模型設定電機在啟動階段快速達到目標轉速且平穩運行,在負載變化時能迅速恢復穩定。當電機實際轉速與參考模型輸出存在偏差時,LabVIEW?根據自適應算法調整?PID?參數,實時優化變頻器的控制信號,確保電機在不同負載條件下都能保持穩定、精確的轉速。
四、優勢與挑戰
(一)優勢
-
提高控制精度:能夠根據系統的實時狀態自動調整?PID?參數,使系統在不同工況下都能保持較高的控制精度,減少穩態誤差和超調量。
-
增強系統適應性:適應被控對象特性的變化和外部干擾,提高系統的魯棒性。例如,在工業生產中,設備老化、原材料特性改變等因素都不會對控制效果產生過大影響。
-
優化控制性能:改善系統的動態響應性能,如加快響應速度、縮短調節時間,提高生產效率和產品質量。
(二)挑戰
-
算法設計復雜:無論是模糊邏輯還是模型參考自適應控制等方法,算法設計都需要深厚的理論知識和豐富的實踐經驗。例如,模糊規則的制定需要對被控對象有深入的理解,否則可能導致控制效果不佳。
-
系統調試難度大:由于參數自適應調整涉及多個變量和復雜的算法,系統調試過程較為復雜。需要花費大量時間和精力對算法參數進行優化,以確保系統穩定運行和良好的控制性能。
-
計算資源需求高:實時計算和調整?PID?參數需要一定的計算資源。在一些資源受限的系統中,可能需要優化算法或升級硬件以滿足計算需求,增加了系統成本和復雜性。
基于?LabVIEW?實現?PID?控制根據情況選擇參數,為工業控制提供了更智能、高效的解決方案。盡管面臨一些難點,但隨著技術的發展和工程師經驗的積累,這種技術將在更多領域得到廣泛應用和不斷完善。
![[redis進階四]分布式系統之哨兵(2)](http://pic.xiahunao.cn/[redis進階四]分布式系統之哨兵(2))



 , SpringBoot項目的創建(IDEA2024版本))


聯網情況下部署)











