文章目錄
- 1.AVL樹的概念
- 2.AVL樹的結構
- 3.AVL樹的插入
- 4.AVL樹的旋轉
- 4.1 左單旋
- 4.2 右單旋
- 4.3 右左雙旋
- 4.4 左右雙旋
- 5.AVL樹的刪除
- 6.AVL樹的高度
- 7.AVL樹的平衡判斷
- 希望讀者們多多三連支持
- 小編會繼續更新
- 你們的鼓勵就是我前進的動力!
二叉搜索樹有其自身的缺陷,假如往樹中插入的元素有序或者接近有序,二叉搜索樹就會退化成單支樹,時間復雜度會退化成 O(N),因此 map、set 等關聯式容器的底層結構是對二叉樹進行了平衡處理,即采用平衡樹來實現
1.AVL樹的概念

我們已經從多種樹型結構走到現在,每一次變化都是為了提高搜索的效率,即時間復雜度
二叉搜索樹雖可以縮短查找的效率,但如果數據有序或接近有序二叉搜索樹將退化為單支樹,查找元素相當于在順序表中搜索元素,效率低下,因此發明了 AVL 樹
那么什么是AVL樹呢?
當向二叉搜索樹中插入新結點后,如果能保證每個結點的左右子樹高度之差的絕對值不超過 1 (需要對樹中的結點進行調整),即可降低樹的高度,從而減少平均搜索長度
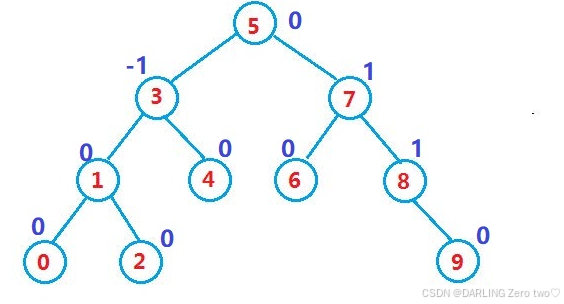
一棵 AVL 樹或者是空樹,應該是具有以下性質的二叉搜索樹:
- 它的左右子樹都是
AVL樹 - 左右子樹高度之差(簡稱平衡因子)的絕對值不超過
1(-1/0/1)
二叉搜索樹在理想情況下時間復雜度與二叉平衡搜索樹相同,均為 O ( l o g 2 n ) O(log_2 n) O(log2?n),但在極端情況下二叉平衡搜索樹優于二叉搜索樹,因為二叉平衡搜索樹會自己調整平衡(后面會詳細解釋)
為什么是嚴格的絕對值為 1,不是 0 或者更大的數字?
若要求高度差為
0,即嚴格平衡,樹的結構會過于rigid(僵化)。每次插入或刪除節點都可能需要大量調整操作,導致性能下降。允許高度差為1,在保持較好平衡性的同時,減少了不必要的調整
若允許高度差為2,樹的平衡性會明顯下降,可能出現一側子樹比另一側高很多的情況,導致查找等操作的時間復雜度增加
所以平衡因子為1是最合適的
2.AVL樹的結構
template<class K, class V>
struct AVLTreeNode
{pair<K, V> _kv;AVLTreeNode<K, V>* _left;AVLTreeNode<K, V>* _right;AVLTreeNode<K, V>* _parent;int _bf;AVLTreeNode(const pair<K, V>& kv):_kv(kv),_left(nullptr),_right(nullptr),_parent(nullptr),_bf(0){ }
};
pair<K, V> _kv:用于存儲鍵值對,pair是C++標準庫中的一個模板類,可將兩個不同類型的值組合在一起AVLTreeNode<K, V>* _left:指向左子節點的指針AVLTreeNode<K, V>* _right:指向右子節點的指針AVLTreeNode<K, V>* _parent:指向父節點的指針,這在調整樹的平衡時很有用int _bf:平衡因子(Balance Factor),用來記錄該節點左右子樹的高度差。平衡因子為0時表示左右子樹高度相等;為1時表示右子樹比左子樹高1;為-1時表示左子樹比右子樹高1
3.AVL樹的插入
typedef AVLTreeNode<K, V> Node;
public:bool Insert(const pair<K, V>& kv){if (_root == nullptr){_root = new Node(kv);return true;}//尋找節點插入位置Node* cur = _root;Node* parent = nullptr;while (cur){if (cur->_kv.first < kv.first){parent = cur;cur = cur->_right;}else if (cur->_kv.first > kv.first){parent = cur;cur = cur->_left;}else{return false;}}//鏈接插入節點與AVL樹cur = new Node(kv);if (parent->_kv.first < kv.first){parent->_right = cur;}else{parent->_left = cur;}cur->_parent = parent;//調整平衡因子while (parent){if (cur == parent->_left){parent->_bf--;}else{parent->_bf++;}if (parent->_bf == 0){break;}else if (parent->_bf == 1 || parent->_bf == -1){cur = parent;parent = parent->_parent;}else if (parent->_bf == 2 || parent->_bf == -2){//旋轉調整(...)}else{assert(false);}}return true;}
AVL 樹的插入和二叉搜索樹是很像的,先根據左大右小的原則,尋找插入節點的位置,然后判斷父母節點與插入節點的關系,連接新節點,唯一不同的地方是平衡因子調節的部分,高度差是由右子樹減去左子樹得出的,可以總結出以下方法:
🚩 (1)新增在左,parent平衡因子減減
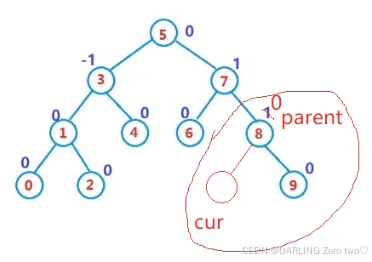
🚩 (2)新增在右,parent平衡因子加加
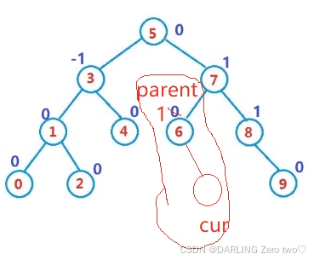
🚩 (3)更新后parent平衡因子 == 0
說明 parent 所在的子樹的高度不變,不會影響祖先,不用再繼續沿著到 root 的路徑往上更新,然后循環結束
🚩 (4)更新后parent平衡因子 == 1 or -1
說明 parent 所在的子樹的高度變化,會影響祖先,需要繼續沿著到 root 的路徑往上更新,循環繼續
🚩 (5)更新后parent平衡因子 == 2 or -2
說明 parent 所在的子樹的高度變化且不平衡,需要對parent所在子樹進行旋轉,讓他平衡,然后循環結束
🔥值得注意的是: 如果平衡因子出現比 2 還大,比 -2 還小的數,說明之前的插入就已經出問題了
4.AVL樹的旋轉
4.1 左單旋
void RotateL(Node* parent)
{Node* cur = parent->_right;Node* curleft = cur->_left;parent->_right = curleft;if (curleft){curleft->_parent = parent;}cur->_left = parent;Node* ppnode = parent->_parent;parent->_parent = cur;if (parent == _root){_root = cur;cur->_parent = nullptr;}else{if (ppnode->_left == parent){ppnode->_left = cur;}else{ppnode->_right = cur;}cur->_parent = ppnode;}parent->_bf = cur->_bf = 0;
}
以下將根據一個圖例來解釋如何進行的左單旋:
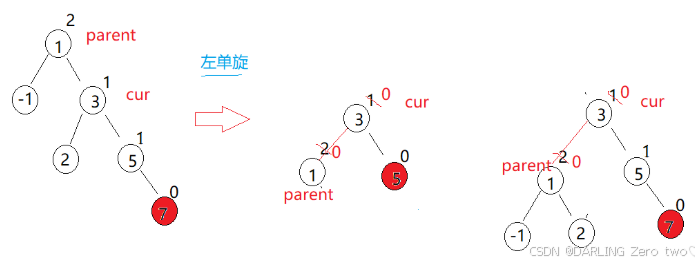
左單旋顧名思義就是右子樹太長,需要向左旋轉形成平衡,平衡因子為 2 的節點定為 parent,其右節點為 cur,cur 的左節點為 curleft
- 調整 parent 的右子節點: 把
parent的右子節點設置成curleft,若curleft不為空,就把curleft的父節點設置成parent - 調整 cur 的左子節點: 把
cur的左子節點設置成parent,ppnode為parent的父節點,把parent的父節點設置成cur - 調整根節點或者 ppnode 的子節點: 若
parent是根節點,那就把cur設為新的根節點,并且將cur的父節點設為nullptr。若parent不是根節點,就依據parent是ppnode的左子節點還是右子節點,來更新ppnode的相應子節點為cur,同時把cur的父節點設為ppnode
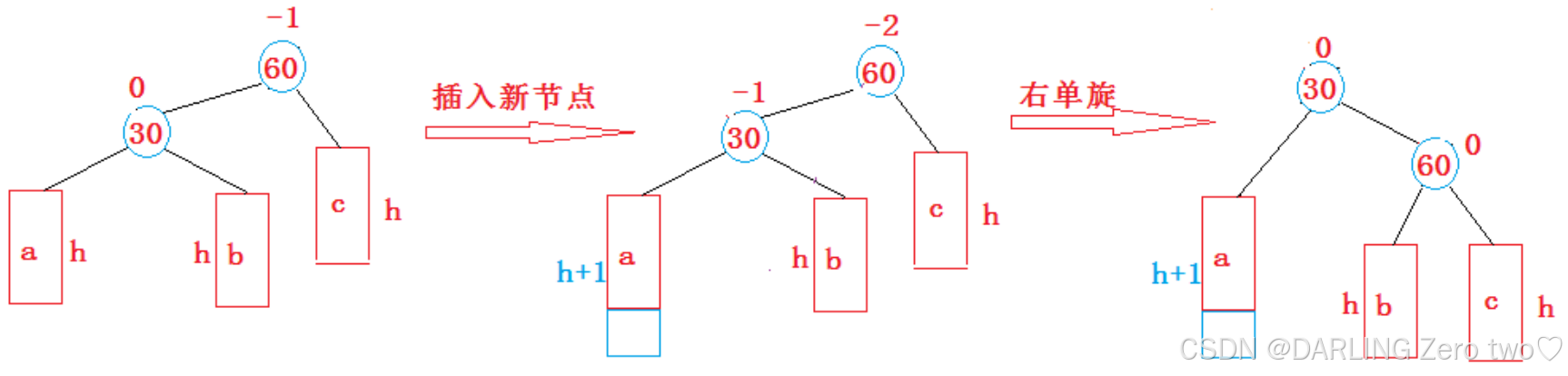
4.2 右單旋
void RotateR(Node* parent)
{Node* cur = parent->_left;Node* curright = cur->_right;parent->_left = curright;if (curright){curright->_parent = parent;}Node* ppnode = parent->_parent;cur->_right = parent;parent->_parent = cur;if (ppnode == nullptr){_root = cur;cur->_parent = nullptr;}else{if (ppnode->_left == parent){ppnode->_left = cur;}else{ppnode->_right = cur;}cur->_parent = ppnode;}parent->_bf = cur->_bf = 0;
}
和左單旋類似,這里就不詳細解釋了
4.3 右左雙旋
void RotateRL(Node* parent)
{Node* cur = parent->_right;Node* curleft = cur->_left;int bf = curleft->_bf;RotateR(parent->_right);RotateL(parent);if (bf == 0){cur->_bf = 0;curleft->_bf = 0;parent->_bf = 0;}else if (bf == 1){cur->_bf = 0;curleft->_bf = 0;parent->_bf = -1;}else if (bf == -1){cur->_bf = 1;curleft->_bf = 0;parent->_bf = 0;}else{assert(false);}
}
右左雙旋適用于新節點插入較高右子樹的左側的情況

30 為 parent 節點,90 為 cur 節點,60 為 curleft 節點
先以 90 進行右單旋,再以 30 進行左單旋
雙旋的重點是平衡節點的調整,根據多個例子可以知道,主要是看 curleft 節點的平衡因子
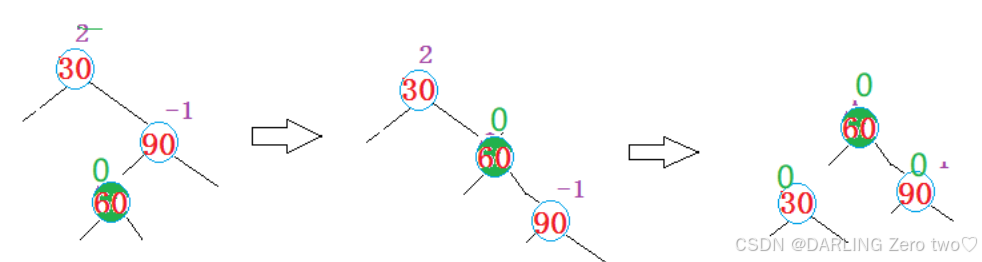
如果原來 curleft 平衡因子為 0 ,即 curleft 為新增節點導致的雙旋,那么 curleft、cur、parent 平衡因子都為 0

如果原來 curleft 平衡因子為 1 ,即在 curleft 右邊新增,那么 cur 和 curleft 平衡因子都為 0,parent 的平衡因子為 1

如果原來 curleft 平衡因子為 -1 ,即在 curleft 左邊新增,那么 parent 和 curleft 平衡因子都為 0,cur 的平衡因子為 1
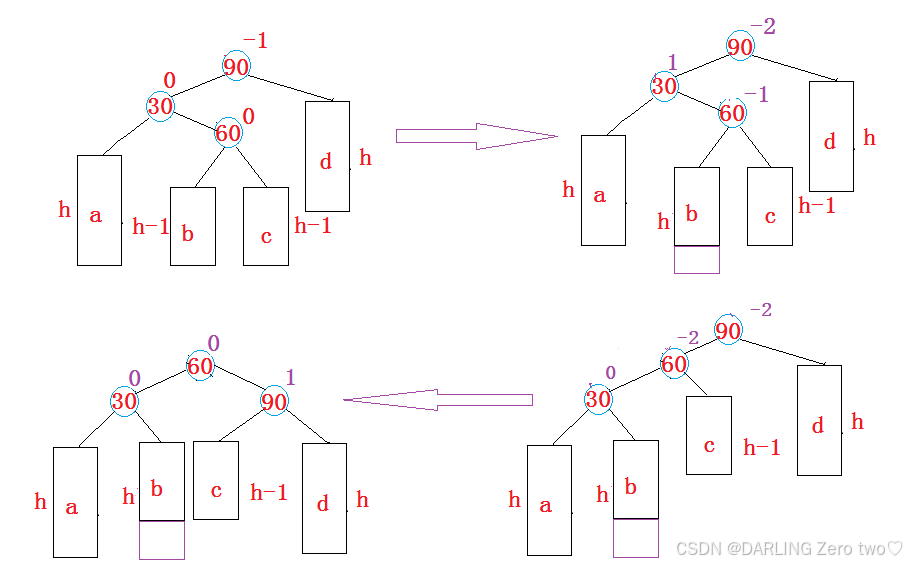
4.4 左右雙旋
void RotateLR(Node* parent)
{Node* cur = parent->_left;Node* curright = cur->_right;int bf = curright->_bf;RotateL(parent->_left);RotateR(parent);if (bf == 0){parent->_bf = 0;cur->_bf = 0;curright->_bf = 0;}else if (bf == -1){parent->_bf = 1;cur->_bf = 0;curright->_bf = 0;}else if (bf == 1){parent->_bf = 0;cur->_bf = -1;curright->_bf = 0;}
}
和右左雙旋類似,這里就不詳細解釋了
5.AVL樹的刪除
在實際開發中,雖然
AVL樹是一種自平衡的二叉搜索樹,但其刪除操作通常不被優先實現
AVL 樹的核心特性是通過旋轉操作(左旋、右旋、左右旋、右左旋)來保證樹的高度平衡。在插入操作中,僅需從插入節點向上回溯至根節點,檢查并調整路徑上節點的平衡因子,最多進行兩次旋轉操作就能恢復樹的平衡。然而,刪除操作后,平衡的破壞可能會沿著從刪除節點到根節點的路徑向上傳播,導致需要多次旋轉操作來恢復平衡。這使得刪除操作的實現邏輯變得異常復雜,需要仔細處理各種可能的情況
而且實現插入刪除一般會使用 紅黑樹、B樹 等更優的數據結構
6.AVL樹的高度
int Height(Node* root)
{if (root == nullptr)return 0;int leftHeight = Height(root->_left);int rightHeight = Height(root->_right);return leftHeight > rightHeight ? leftHeight + 1 : rightHeight + 1;
}
比較左子樹和右子樹的高度,取較大值并加 1(加上當前根節點),得到當前子樹的高度
7.AVL樹的平衡判斷
bool IsBalance(Node* root)
{if (root == nullptr)return true;int leftHight = Height(root->_left);int rightHight = Height(root->_right);if (rightHight - leftHight != root->_bf){cout << "平衡因子異常:" << root->_kv.first << "->" << root->_bf << endl;return false;}return abs(rightHight - leftHight) < 2&& IsBalance(root->_left)&& IsBalance(root->_right);
}
每遍歷一個節點就對其左右子樹的高度進行計算,然后判斷是否絕對值小于 2
總結: AVL 樹是一棵絕對平衡的二叉搜索樹,其要求每個節點的左右子樹高度差的絕對值都不超過 1,這樣可以保證查詢時高效的時間復雜度,即 l o g 2 ( N ) log_2 (N) log2?(N)。但是如果要對 AVL 樹做一些結構修改的操作,性能非常低下,比如:插入時要維護其絕對平衡,旋轉的次數比較多,更差的是在刪除時,有可能一直要讓旋轉持續到根的位置。因此:如果需要一種查詢高效且有序的數據結構,而且數據的個數為靜態的(即不會改變),可以考慮 AVL 樹,但一個結構經常修改,就不太適合
希望讀者們多多三連支持
小編會繼續更新
你們的鼓勵就是我前進的動力!








)

)



:閱讀與注釋日歷類型 QCalendar,本類并未完結,儒略歷,格里高利歷原來就是公歷,)




![[數據處理] 6. 數據可視化](http://pic.xiahunao.cn/[數據處理] 6. 數據可視化)
