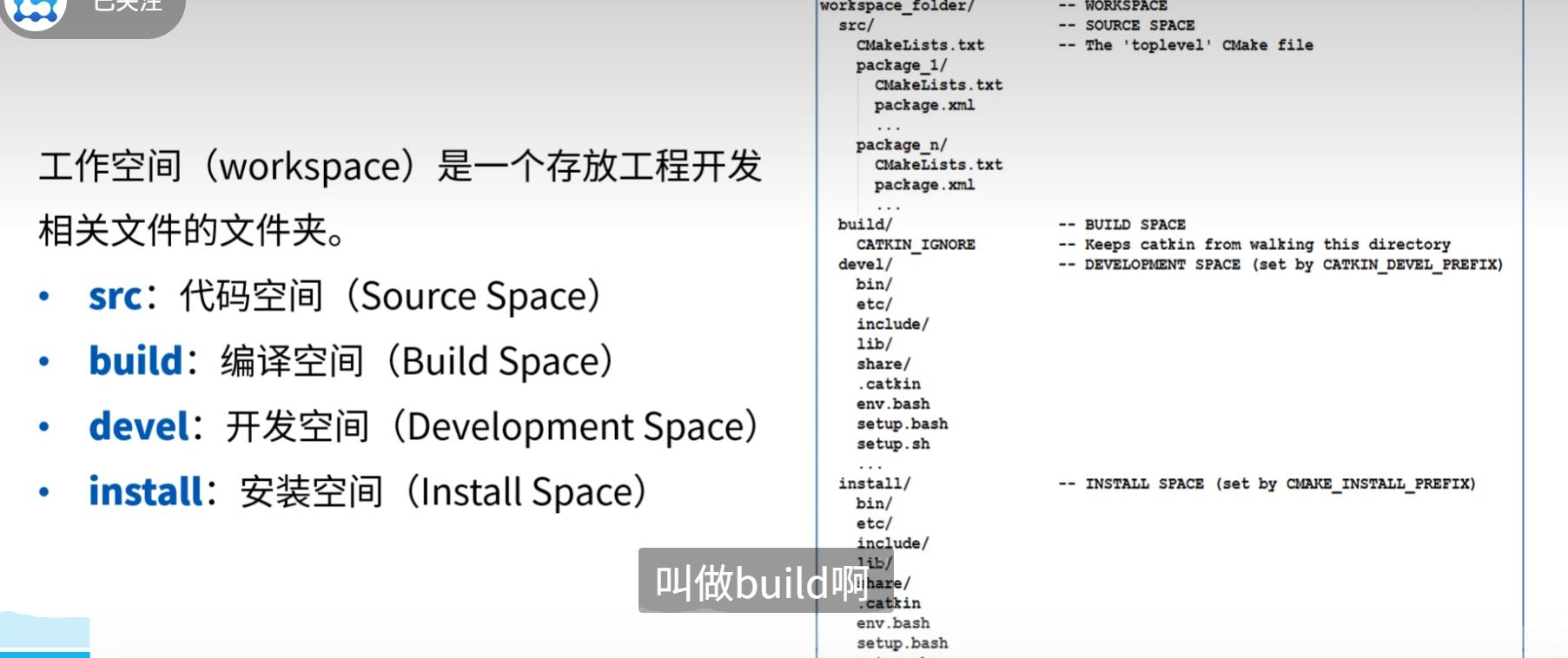
工作空間其實放到嵌入式里就是相關的編程包
-------------------------------------
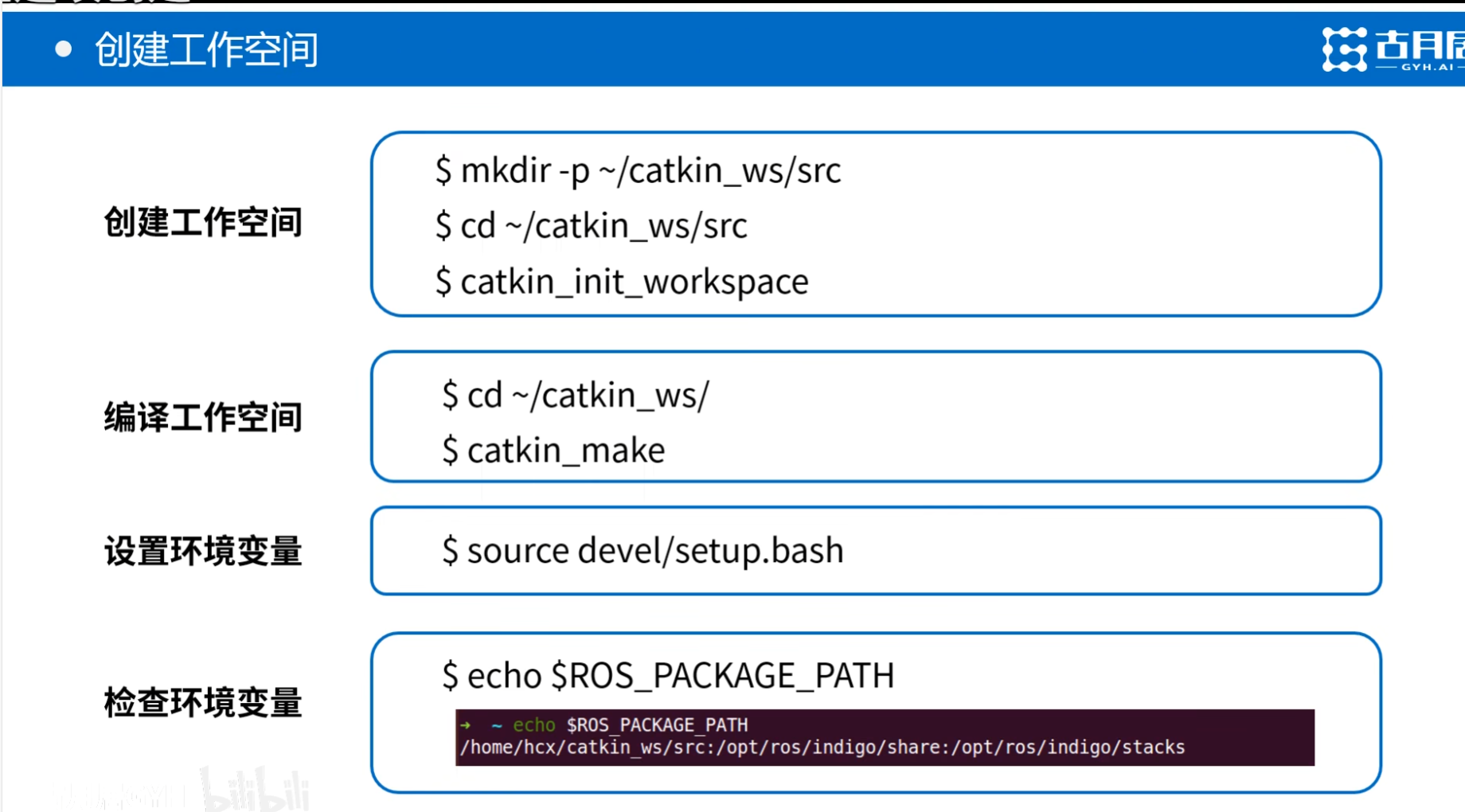 d第一個Init 就是類型的初始化
d第一個Init 就是類型的初始化
然后正常一個catkin_make 后 就會產生如devil之類的文件, 你需要再自己 終端 一個catkin_make install 一下 。這樣對應install也會產生(再設置環境變量之前)
——————————————————————————————————————
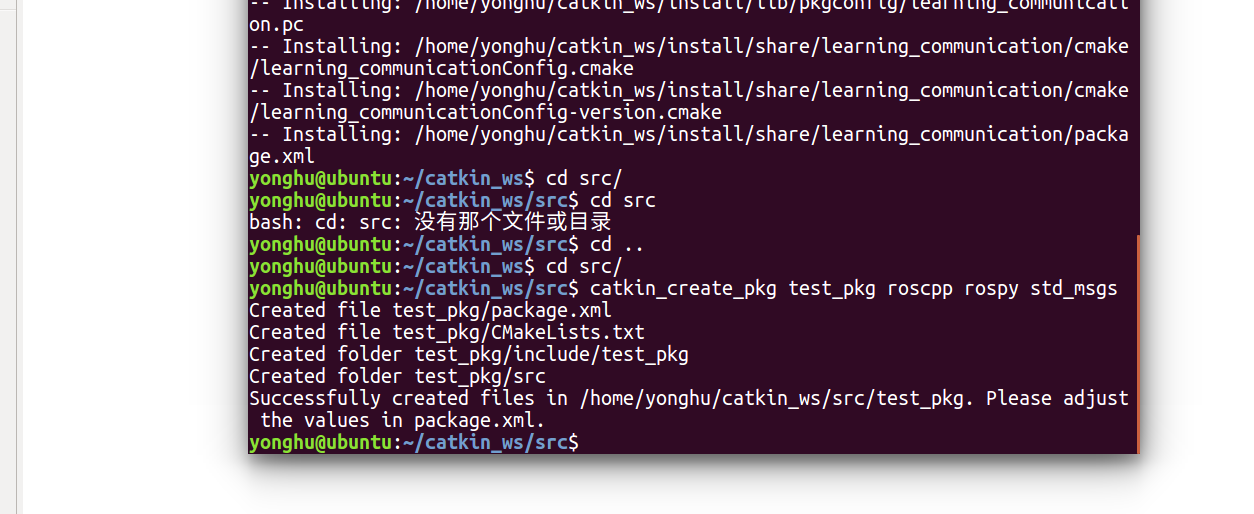
創建功能包? (源碼都是要放在功能包之下的)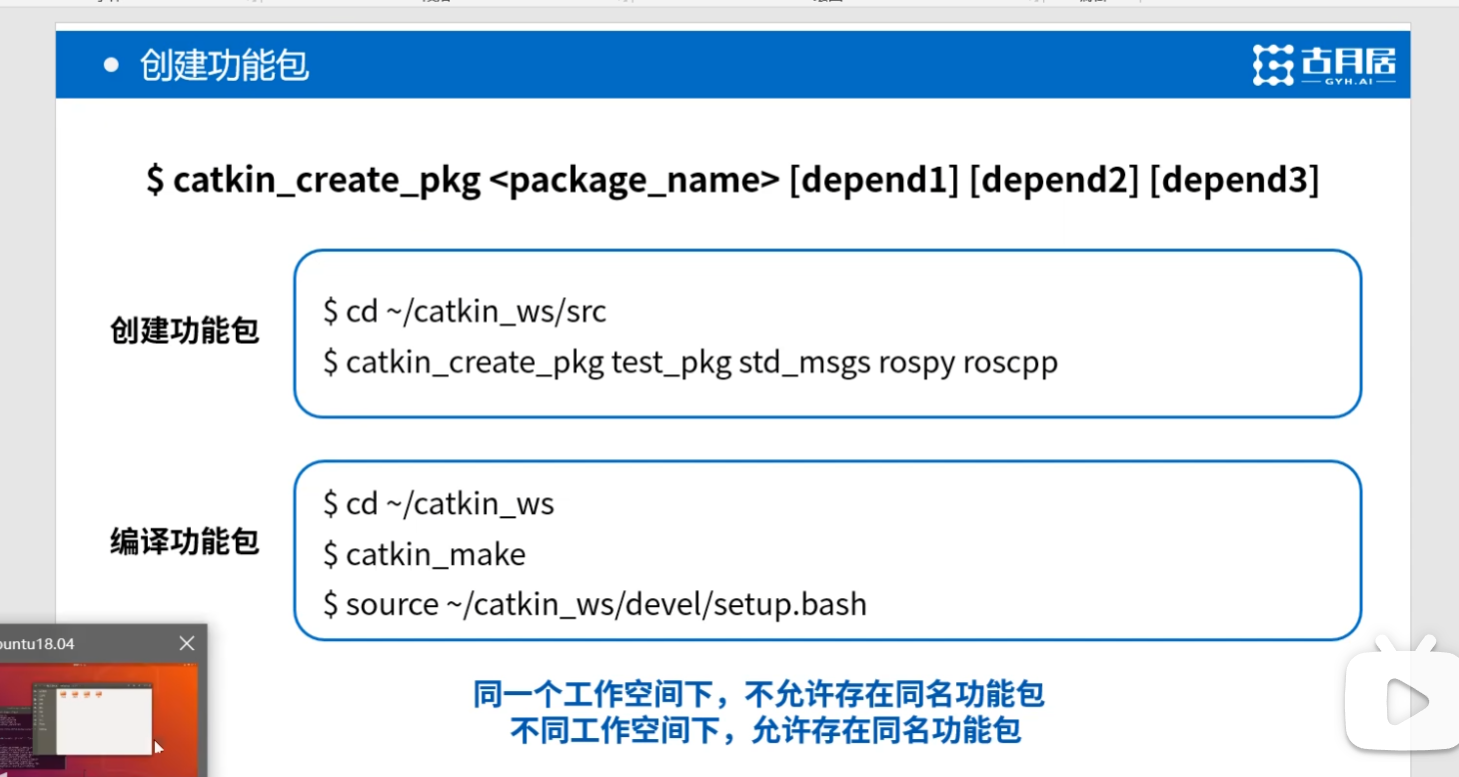
功能包放置在SRC之下
例子: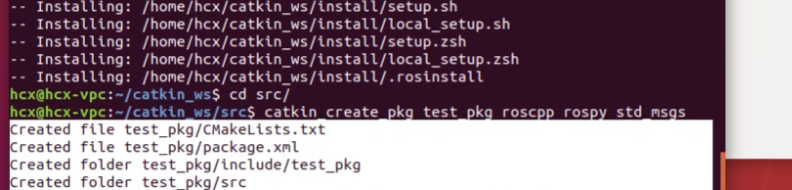
cd到src后。? 我們建立的這個 名為test_pkg的功能包 后期包括 roscpp rospy std_msgs 有關依賴的有的功能包 就是 c++ python 以及有關消息的功能包
————————
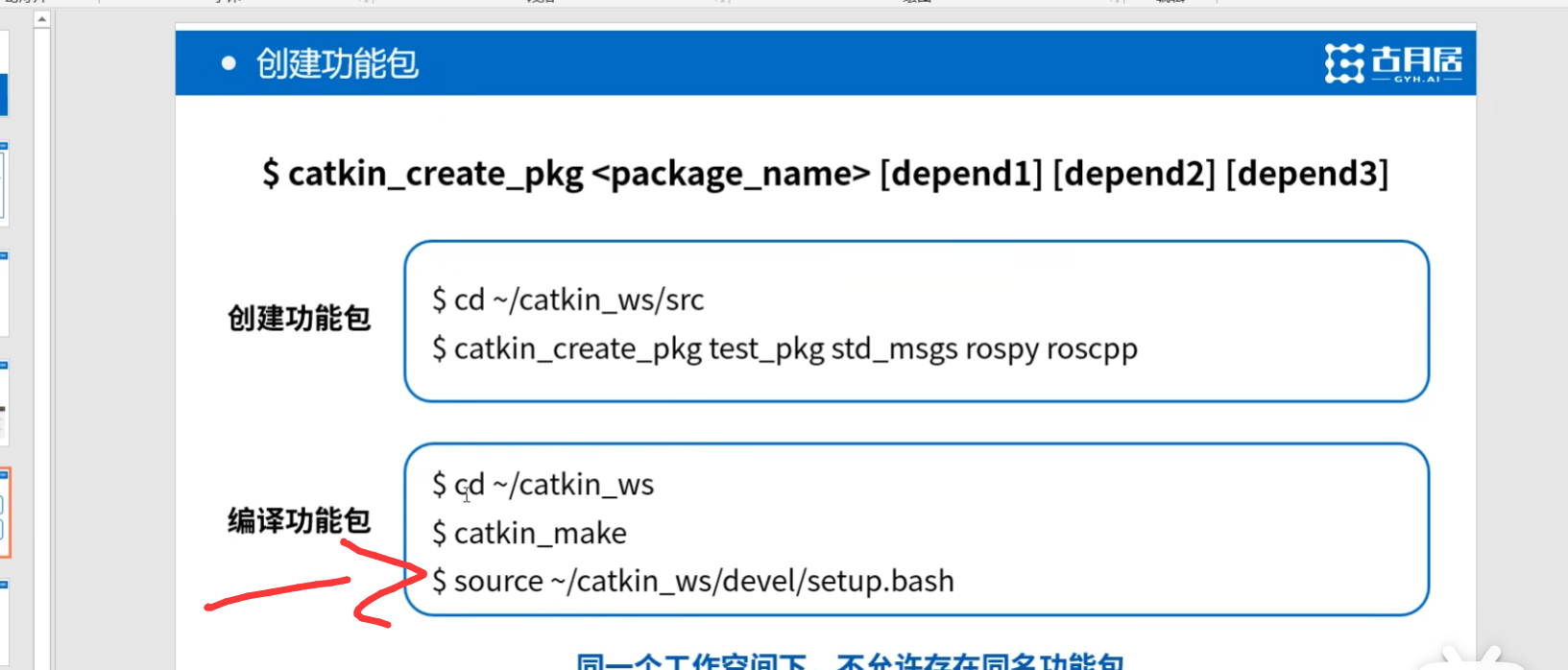
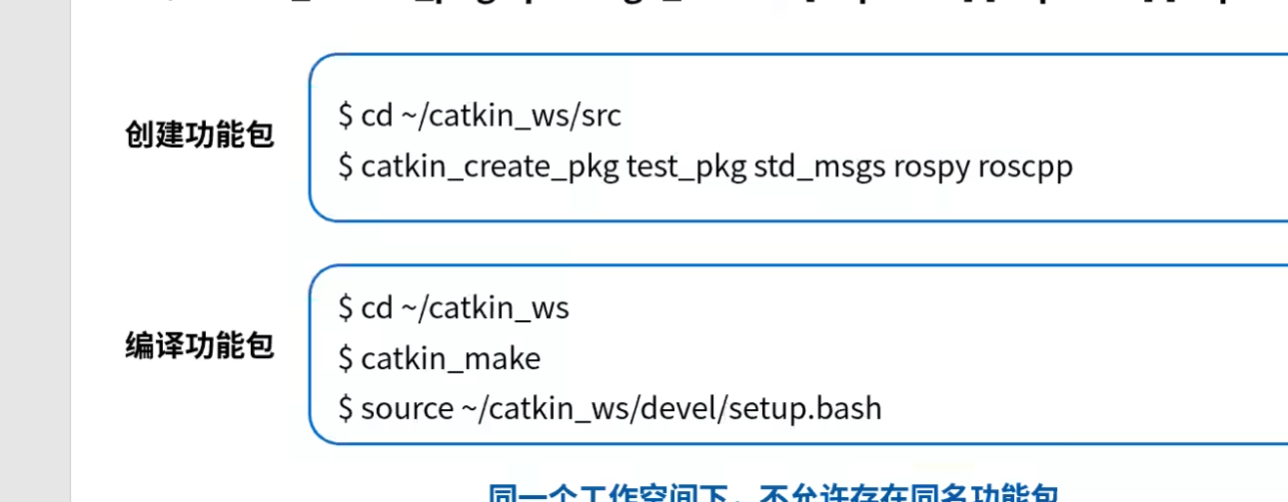
其實創建完 功能包 我們就可以 回到最大的那個工作空間下 進行編譯功能包。 使用catkin_make 但是一般沒寫代碼的話 也編譯不出來啥
---____________________
那我們弄完大的工作空間, 以及內部src的內部的功能包 (有關catkin_make可以統一最后一塊進行編譯) 。 下一步就是弄 環境變量 , 環境變量和make一樣直接在大工作空間目錄下進行即可。 但是他是用于輔助電腦去找到我們設立的功能包的。
所以 環境變量的戲份 就是設置 以及 檢測一下對應的環境變量。
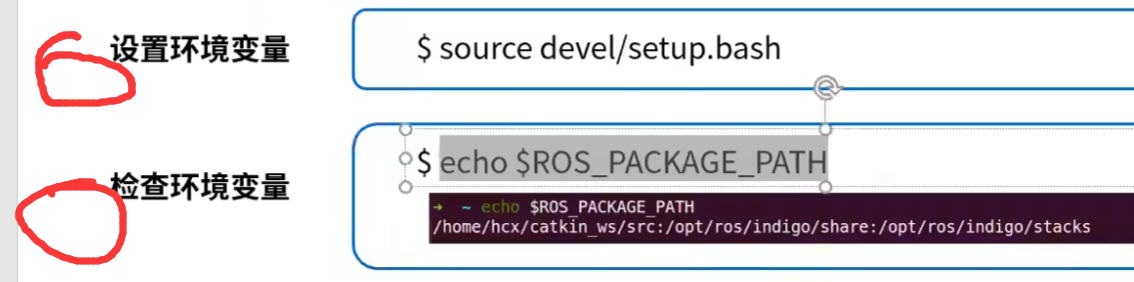
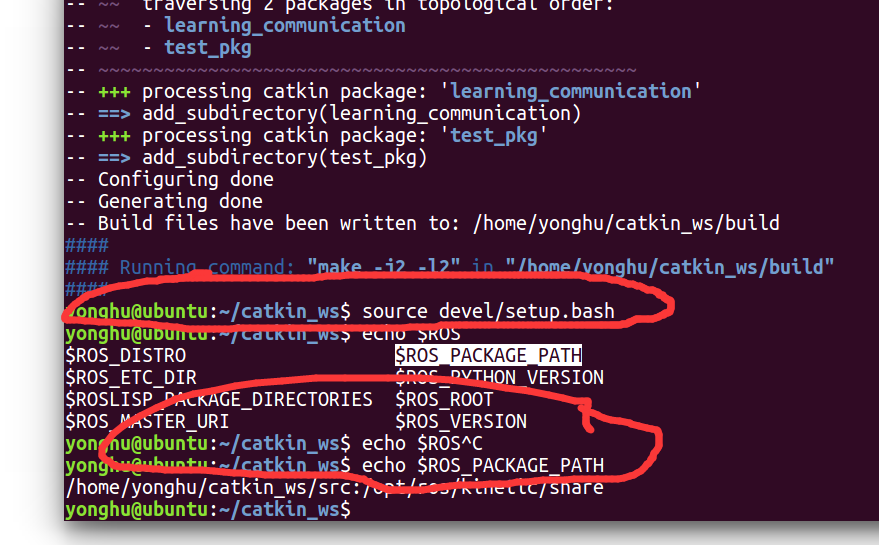
這倆就是設置對應環境變量 以及檢測的反應。
——————————————
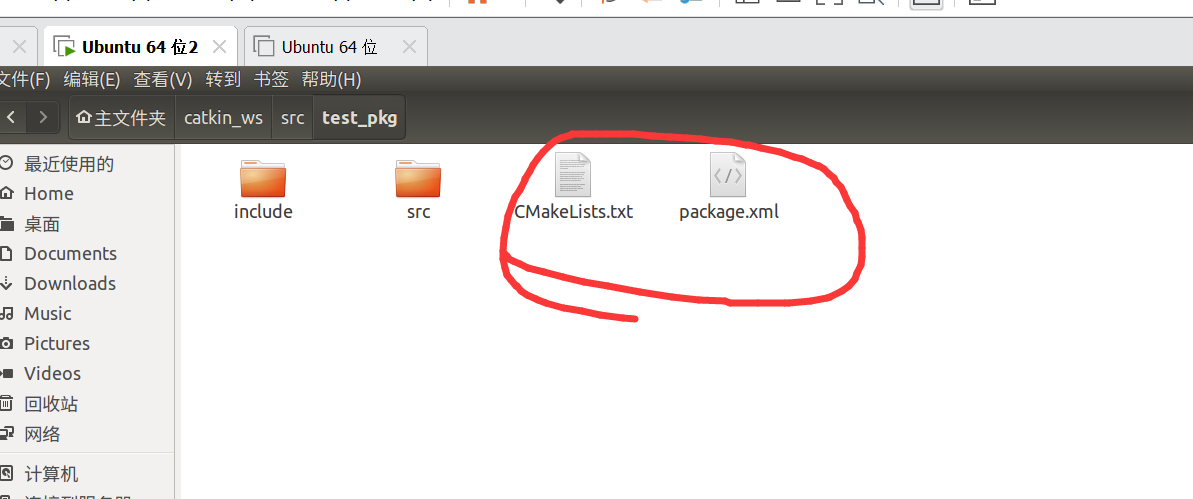
任何一個功能包都是需要這兩個txt的文件的。(藏坑了)
————————————————————
總結: 建立 工作空間,? 然后 對應的 功能包 pkg相關的指令建立 , 然后大目錄下catkin_make進行編譯。 然后記得要設立一個環境變量以及檢測環境變量。
-----------------------



:通用圖像分割的范式革命)
和葡萄酒質量預測(線性回歸))


)





)




)
:流水線構建與自動部署全流程)