一、按鍵開關的基本原理與硬件連接
1.1 按鍵開關的工作原理
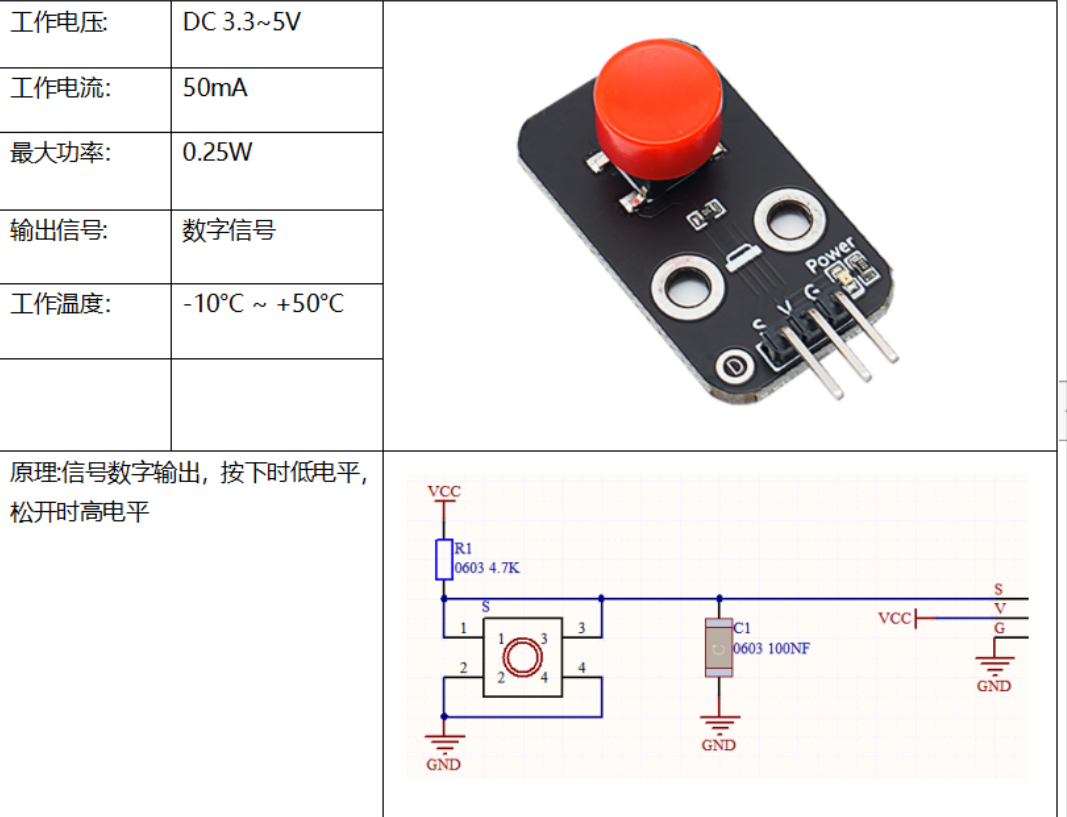
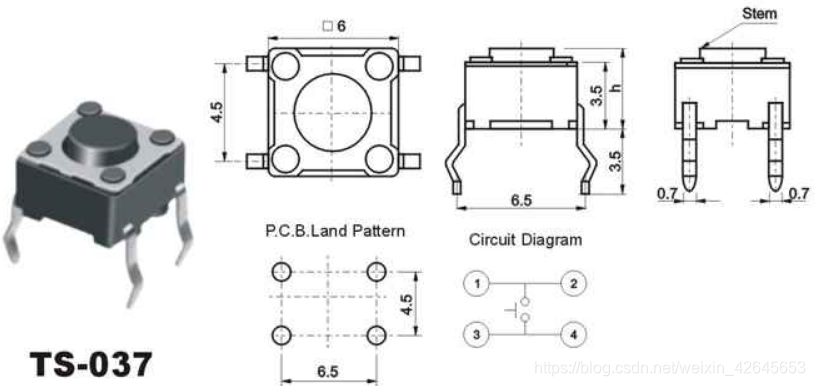
按鍵開關是一種常見的輸入設備,其核心原理基于機械觸點的閉合與斷開。當用戶按下按鍵時,內部的金屬片會連接電路兩端,形成通路;松開按鍵后,金屬片在彈簧作用下恢復原位,電路斷開。這種物理特性使得按鍵開關能夠通過電信號傳遞用戶的操作意圖。
1.1.1 按鍵抖動問題
在機械開關的閉合與斷開過程中,由于金屬片的彈性形變,會產生短暫的信號抖動(通常持續5-10ms)。這種抖動可能導致微控制器誤判按鍵狀態,例如將一次按壓識別為多次按壓。因此,在硬件設計和軟件編程中需要采取消抖措施。
1.2 硬件連接與電路設計
1.2.1 基礎電路搭建
以Arduino Uno為例,以下是一個簡單的按鍵開關電路:
- 按鍵模塊:KY-004模塊包含一個按鈕和兩個引腳(信號S、電源VCC、接地GND)。
- 電阻選擇:
- 上拉電阻(10kΩ):確保按鍵未按下時引腳處于高電平。
- 限流電阻(220Ω):保護LED或其他外設。
1.2.2 接線步驟
- 將按鍵模塊的VCC引腳連接到Arduino的5V。
- 將按鍵模塊的GND引腳連接到Arduino的GND。
- 將按鍵模塊的S引腳連接到Arduino的數字引腳(如D7)。
- 將LED的長腿(陽極)連接到Arduino的另一個數字引腳(如D3),并通過220Ω電阻接地。
1.2.3 電路圖
Arduino Uno
+5V ----[10kΩ]----[KY-004 S引腳]---- GND|+---- D7(數字輸入)二、基礎代碼實現與功能擴展
2.1 最簡按鍵控制代碼
以下代碼演示了如何通過按鍵控制LED的開關:
const int buttonPin = 7; // 按鍵連接到D7
const int ledPin = 3; // LED連接到D3bool ledState = LOW; // LED初始狀態為關閉
int lastButtonState = HIGH; // 上次按鍵狀態void setup() {pinMode(buttonPin, INPUT_PULLUP); // 啟用內部上拉電阻pinMode(ledPin, OUTPUT);
}void loop() {int buttonState = digitalRead(buttonPin); // 讀取按鍵狀態if (buttonState != lastButtonState) { // 檢測按鍵狀態變化if (buttonState == LOW) { // 按鍵按下ledState = !ledState; // 切換LED狀態digitalWrite(ledPin, ledState);}lastButtonState = buttonState; // 更新上次按鍵狀態}delay(10); // 延時避免過度檢測
}2.1.1 代碼解析
INPUT_PULLUP:啟用內部上拉電阻,按鍵未按下時引腳為高電平。- 狀態變化檢測:通過比較當前按鍵狀態與上次狀態,判斷是否發生按壓動作。
- 延時處理:
delay(10)?可降低CPU占用率,但需注意可能影響實時性。
2.1.2 實際應用
- LED開關:通過按鍵控制LED的亮滅。
- 串口調試:在
loop()中添加Serial.println(buttonState),可實時監控按鍵狀態。
2.2 消抖技術實現
2.2.1 軟件消抖
通過延時或狀態機消除按鍵抖動:
const int buttonPin = 7;
const int ledPin = 3;bool ledState = LOW;
int lastButtonState = HIGH;
unsigned long lastDebounceTime = 0;
const long debounceDelay = 50; // 消抖時間(ms)void setup() {pinMode(buttonPin, INPUT_PULLUP);pinMode(ledPin, OUTPUT);Serial.begin(9600);
}void loop() {int reading = digitalRead(buttonPin);if (reading != lastButtonState) {lastDebounceTime = millis(); // 記錄抖動開始時間}if ((millis() - lastDebounceTime) > debounceDelay) {if (reading != buttonState) {buttonState = reading;if (buttonState == LOW) {ledState = !ledState;digitalWrite(ledPin, ledState);}}}lastButtonState = reading;delay(10);
}2.2.2 硬件消抖
在按鍵電路中加入RC低通濾波器(電阻+電容),平滑信號抖動。
三、進階功能與編程技巧
3.1 多按鍵控制與狀態機設計
3.1.1 多按鍵邏輯
通過狀態機管理多個按鍵的組合操作:
enum Mode { MODE1, MODE2, MODE3 };
Mode currentMode = MODE1;void setup() {pinMode(2, INPUT_PULLUP); // 按鍵1pinMode(3, INPUT_PULLUP); // 按鍵2pinMode(4, OUTPUT); // 輸出設備
}void loop() {int button1 = digitalRead(2);int button2 = digitalRead(3);if (button1 == LOW) {currentMode = (currentMode + 1) % 3;while (digitalRead(2) == LOW); // 等待按鍵釋放}if (button2 == LOW) {digitalWrite(4, !digitalRead(4)); // 切換輸出狀態while (digitalRead(3) == LOW);}switch (currentMode) {case MODE1:// 模式1邏輯break;case MODE2:// 模式2邏輯break;case MODE3:// 模式3邏輯break;}
}3.1.2 狀態機優勢
- 模塊化設計:將復雜邏輯拆分為獨立狀態。
- 可擴展性:新增狀態無需重構現有代碼。
3.2 非阻塞延時與實時性優化
3.2.1 使用millis()替代delay()
避免delay()阻塞主循環,實現多任務并發:
unsigned long previousMillis = 0;
const long interval = 1000; // 任務周期(ms)void loop() {unsigned long currentMillis = millis();if (currentMillis - previousMillis >= interval) {previousMillis = currentMillis;// 執行周期性任務}// 其他實時任務
}3.2.2 實際應用
- 定時器:精確控制任務執行頻率。
- 多任務調度:同時管理按鍵響應、傳感器采集等任務。
四、Arduino與ESP32/樹莓派的對比
4.1 硬件性能對比
| 維度 | Arduino Uno | ESP32 | 樹莓派Pico |
|---|---|---|---|
| 處理器 | ATmega328P (16MHz) | Xtensa LX6 (240MHz) | ARM Cortex-M0+ (133MHz) |
| 內存/存儲 | 2KB SRAM, 32KB Flash | 520KB SRAM, 4MB Flash | 264KB SRAM, 2MB Flash |
| 網絡能力 | 無(需外接模塊) | 內置Wi-Fi/藍牙 | 無(需外接模塊) |
| 典型應用 | 簡單控制(如LED、電機) | 物聯網、智能家居 | 低成本多任務處理 |
4.2 按鍵開關應用的差異
4.2.1 Arduino Uno
- 優勢:
- 低功耗:適合電池供電設備。
- 實時性:直接訪問硬件寄存器,響應速度更快。
- 局限:
- 無網絡功能:無法直接實現遠程控制。
- 擴展性有限:需通過外接模塊增加功能。
4.2.2 ESP32
- 優勢:
- 內置網絡:支持Wi-Fi和藍牙,適合物聯網項目。
- 高性能:雙核處理器可處理復雜任務(如音頻播放)。
- 局限:
- 成本較高:價格約5?5?15。
- 開發復雜度:需掌握網絡協議棧。
4.2.3 樹莓派Pico
- 優勢:
- 高性能低成本:ARM Cortex-M0+核心,價格約4?4?6。
- 多任務支持:適合需要并發處理的場景(如傳感器數據采集+顯示)。
- 局限:
- 無操作系統:需手動管理資源分配。
- 外設依賴:需外接模塊實現網絡或存儲功能。
五、實際案例分析
5.1 智能臺燈控制系統
5.1.1 功能需求
- 按鍵控制:通過按鍵切換LED亮度級別。
- PWM調光:使用
analogWrite()調節LED亮度。 - 狀態指示:通過串口打印當前模式。
5.1.2 代碼實現
const int buttonPin = 2;
const int ledPin = 9;
int brightness = 0;
int mode = 0;void setup() {pinMode(buttonPin, INPUT_PULLUP);pinMode(ledPin, OUTPUT);Serial.begin(9600);
}void loop() {if (digitalRead(buttonPin) == LOW) {delay(50); // 消抖mode = (mode + 1) % 3; // 三種亮度模式while (digitalRead(buttonPin) == LOW); // 等待按鍵釋放}switch (mode) {case 0:brightness = 0; // 關閉break;case 1:brightness = 128; // 中等亮度break;case 2:brightness = 255; // 最大亮度break;}analogWrite(ledPin, brightness);Serial.print("當前模式: ");Serial.println(mode);delay(100);
}5.1.3 擴展建議
- 增加傳感器:結合光敏電阻實現自動調光。
- 遠程控制:通過ESP32的Wi-Fi功能實現手機App控制。
5.2 音樂播放器控制
5.2.1 功能需求
- 按鍵切換歌曲:通過按鍵選擇不同音調。
- 蜂鳴器播放:使用
tone()函數生成音樂。
5.2.2 代碼實現
const int buttonPin = 7;
const int buzzerPin = 9;
int currentSong = 0;void setup() {pinMode(buttonPin, INPUT_PULLUP);pinMode(buzzerPin, OUTPUT);Serial.begin(9600);
}void loop() {if (digitalRead(buttonPin) == LOW) {delay(50);currentSong = (currentSong + 1) % 3;while (digitalRead(buttonPin) == LOW);}switch (currentSong) {case 0:tone(buzzerPin, 262); // C4break;case 1:tone(buzzerPin, 294); // D4break;case 2:tone(buzzerPin, 330); // E4break;}delay(1000);noTone(buzzerPin);
}5.2.3 擴展建議
- 增加音階:通過數組存儲多個音調,實現更復雜的旋律。
- 動態調整:通過電位器調節播放速度。
六、未來趨勢與技術展望
6.1 RISC-V架構的崛起
隨著RISC-V開源指令集的普及,未來的Arduino開發板可能采用RISC-V架構。這種架構提供更高的靈活性和可定制性,適合需要高性能和低功耗的應用場景。
6.2 邊緣計算的融合
結合TensorFlow Lite等機器學習框架,Arduino設備將具備本地AI推理能力,實現更智能的邊緣計算應用。例如,通過按鍵觸發的語音識別或圖像分類。
6.3 低功耗物聯網發展
隨著LoRaWAN、NB-IoT等低功耗廣域網技術的成熟,Arduino設備將在智慧城市、農業監測等領域發揮更大作用。例如,通過按鍵控制的環境監測站,實時上傳數據至云端。

在施工階段的實踐與應用方案(90頁PPT)(文末有下載方式))


和畫像(Figure))





)
 ----紋理)
——環境搭建與OpenCV簡介)



)
)
---java版)
